Hyperparameter Evolution for YOLOv5#
📚 This guide explains hyperparameter evolution for YOLOv5 🚀. Hyperparameter evolution is a method of Hyperparameter Optimization using a Genetic Algorithm (GA) for optimization.
Hyperparameters in machine learning control various aspects of training, and finding optimal values for them can be a challenge. Traditional methods like grid searches can quickly become intractable due to:
- The high dimensional search space
- Unknown correlations among the dimensions
- Expensive nature of evaluating the fitness at each point
This makes genetic algorithms a suitable candidate for hyperparameter searches.
Before You Start#
Clone repo and install requirements.txt in a Python>=3.8.0 environment, including PyTorch>=1.8. Models and datasets download automatically from the latest YOLOv5 release.
git clone https://github.com/ultralytics/yolov5 # clone
cd yolov5
pip install -r requirements.txt # install1. Initialize Hyperparameters#
YOLOv5 has about 30 hyperparameters used for various training settings. These are defined in *.yaml files in the /data/hyps directory. Better initial guesses will produce better final results, so it is important to initialize these values properly before evolving. If in doubt, simply use the default values, which are optimized for YOLOv5 COCO training from scratch.
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Hyperparameters for low-augmentation COCO training from scratch
# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.5 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 1.0 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.5 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)2. Define Fitness#
Fitness is the value we seek to maximize. In YOLOv5 we define a default fitness function as a weighted combination of metrics: mAP@0.5 contributes 10% of the weight and mAP@0.5:0.95 contributes the remaining 90%, with precision (P) and recall (R) absent. You may adjust these as you see fit or use the default fitness definition in utils/metrics.py (recommended).
def fitness(x):
"""Return model fitness as the sum of weighted metrics [P, R, mAP@0.5, mAP@0.5:0.95]."""
w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
return (x[:, :4] * w).sum(1)3. Evolve#
Evolution is performed about a base scenario which we seek to improve upon. The base scenario in this example is fine-tuning COCO128 for 10 epochs using pretrained YOLOv5s. The base scenario training command is:
python train.py --epochs 10 --data coco128.yaml --weights yolov5s.pt --cacheTo evolve hyperparameters specific to this scenario, starting from our initial values defined in Section 1., and maximizing the fitness defined in Section 2., append --evolve:
# Single-GPU
python train.py --epochs 10 --data coco128.yaml --weights yolov5s.pt --cache --evolve
# Multi-GPU with delay
for i in {0..7}; do
sleep $((30 * i)) # 30-second delay (optional)
echo "Starting GPU $i..."
nohup python train.py --epochs 10 --data coco128.yaml --weights yolov5s.pt --cache --device $i --evolve > "evolve_gpu_$i.log" &
done
# Continuous training (use with caution)
# for i in {0..7}; do
# sleep $((30 * i)) # 30-second delay (optional)
# echo "Starting continuous training on GPU $i..."
# (
# while true; do
# python train.py --epochs 10 --data coco128.yaml --weights yolov5s.pt --cache --device $i --evolve > "evolve_gpu_$i.log"
# done
# ) &
# doneThe default evolution settings will run the base scenario 300 times, i.e. for 300 generations. You can modify generations via the --evolve argument, i.e. python train.py --evolve 1000.
The main genetic operators are crossover and mutation. In this work mutation is used, with an 80% probability and a 0.04 variance to create new offspring based on a combination of the best parents from all previous generations. Results are logged to runs/evolve/exp/evolve.csv, and the highest fitness offspring is saved every generation as runs/evolve/exp/hyp_evolve.yaml:
# YOLOv5 Hyperparameter Evolution Results
# Best generation: 287
# Last generation: 300
# metrics/precision, metrics/recall, metrics/mAP_0.5, metrics/mAP_0.5:0.95, val/box_loss, val/obj_loss, val/cls_loss
# 0.54634, 0.55625, 0.58201, 0.33665, 0.056451, 0.042892, 0.013441
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.2 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.5 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 1.0 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.5 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)We recommend a minimum of 300 generations of evolution for best results. Note that evolution is generally expensive and time-consuming, as the base scenario is trained hundreds of times, possibly requiring hundreds or thousands of GPU hours.
When evolution finishes, reuse the discovered settings by pointing training at the saved file, for example python train.py --hyp runs/evolve/exp/hyp_evolve.yaml --data your.yaml --weights yolov5s.pt.
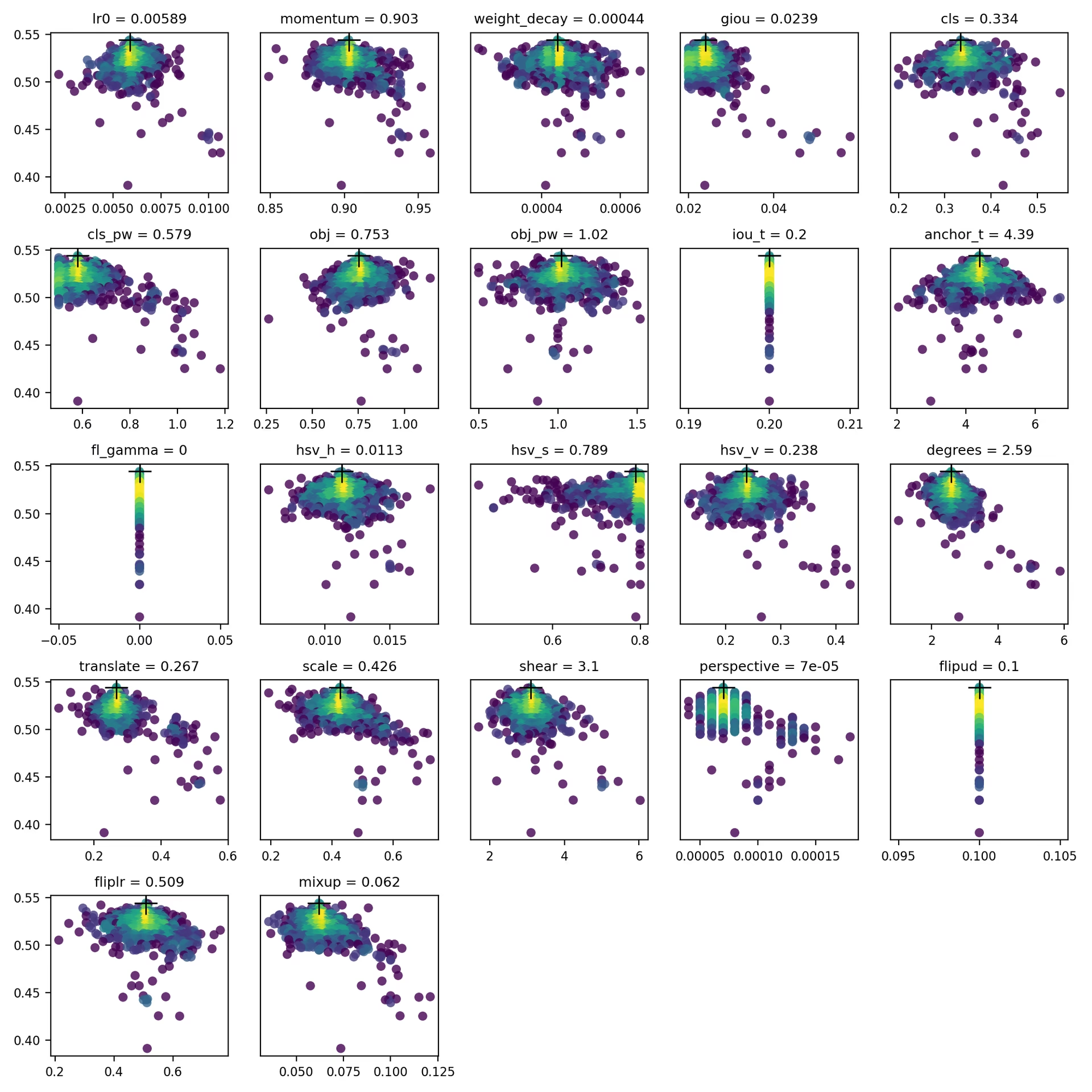
4. Visualize#
evolve.csv is plotted as evolve.png by utils.plots.plot_evolve() after evolution finishes with one subplot per hyperparameter showing fitness (y-axis) vs hyperparameter values (x-axis). Yellow indicates higher concentrations. Vertical distributions indicate that a parameter has been disabled and does not mutate. This is user selectable in the meta dictionary in train.py, and is useful for fixing parameters and preventing them from evolving.
Supported Environments#
Ultralytics provides a range of ready-to-use environments, each pre-installed with essential dependencies such as CUDA, CUDNN, Python, and PyTorch, to kickstart your projects.
- Free GPU Notebooks:



- Google Cloud: GCP Quickstart Guide
- Amazon: AWS Quickstart Guide
- Azure: AzureML Quickstart Guide
- Docker: Docker Quickstart Guide

Project Status#
![]()
This badge indicates that all YOLOv5 GitHub Actions Continuous Integration (CI) tests are successfully passing. These CI tests rigorously check the functionality and performance of YOLOv5 across various key aspects: training, validation, inference, export, and benchmarks. They ensure consistent and reliable operation on macOS, Windows, and Ubuntu, with tests conducted every 24 hours and upon each new commit.