Link to this sectionYOLOv7: Trainable Bag-of-Freebies#
YOLOv7, được phát hành vào tháng 7 năm 2022, là một bước tiến đáng kể trong lĩnh vực phát hiện đối tượng thời gian thực tại thời điểm ra mắt. Nó đạt mức 56.8% AP trên GPU V100, thiết lập các tiêu chuẩn mới khi được giới thiệu. YOLOv7 vượt trội hơn các bộ phát hiện đối tượng cùng thời như YOLOR, YOLOX, Scaled-YOLOv4 và YOLOv5 về cả tốc độ và độ chính xác. Model này được huấn luyện từ đầu trên tập dữ liệu MS COCO mà không sử dụng bất kỳ tập dữ liệu nào khác hoặc trọng số được huấn luyện trước. Mã nguồn cho YOLOv7 có sẵn trên GitHub. Lưu ý rằng các model mới hơn như YOLO11 và YOLO26 đã đạt được độ chính xác cao hơn với hiệu suất cải thiện kể từ đó.
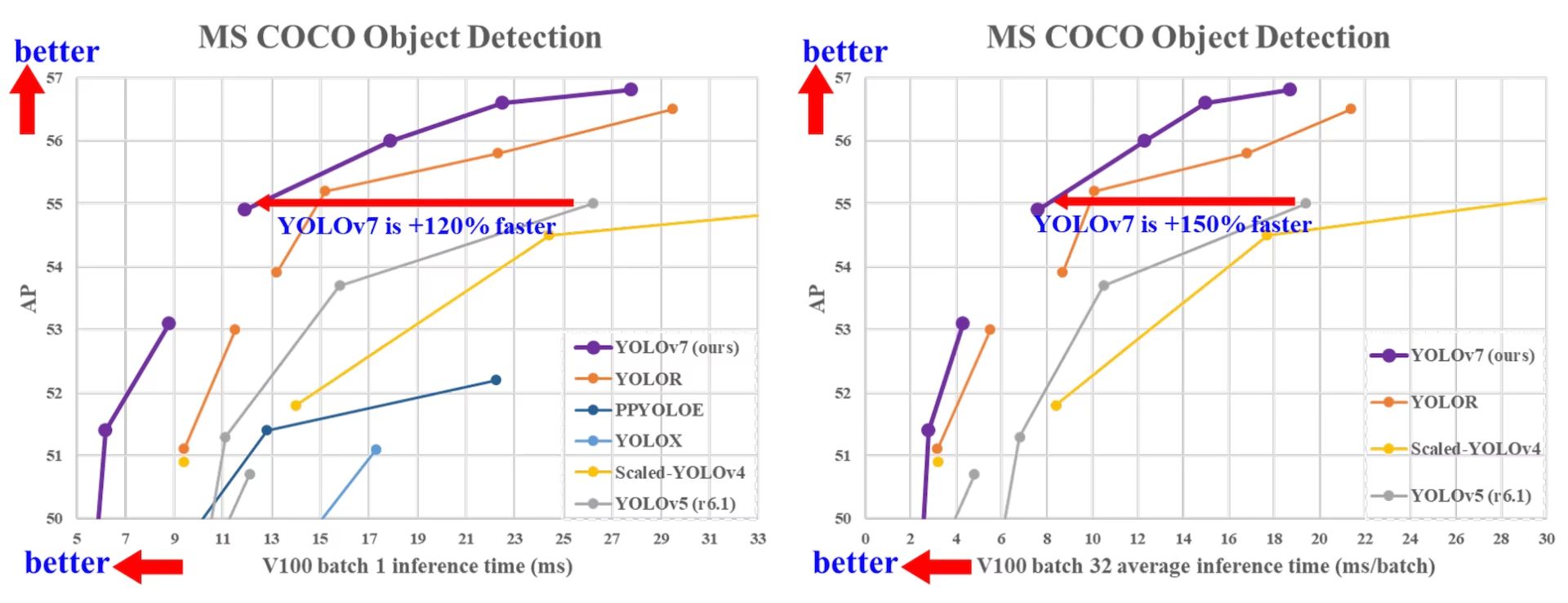
Link to this sectionSo sánh các bộ phát hiện đối tượng SOTA#
Từ kết quả trong bảng so sánh YOLO, chúng ta thấy phương pháp được đề xuất có sự cân bằng tốt nhất giữa tốc độ và độ chính xác một cách toàn diện. Nếu so sánh YOLOv7-tiny-SiLU với YOLOv5-N (r6.1), phương pháp của chúng tôi nhanh hơn 127 fps và chính xác hơn 10.7% về AP. Ngoài ra, YOLOv7 đạt 51.4% AP ở tốc độ khung hình 161 fps, trong khi PPYOLOE-L với cùng mức AP chỉ có tốc độ 78 fps. Về mức sử dụng tham số, YOLOv7 ít hơn 41% so với PPYOLOE-L.
Nếu so sánh YOLOv7-X với tốc độ suy luận 114 fps với YOLOv5-L (r6.1) có tốc độ suy luận 99 fps, YOLOv7-X có thể cải thiện AP thêm 3.9%. Nếu YOLOv7-X được so sánh với YOLOv5-X (r6.1) ở quy mô tương tự, tốc độ suy luận của YOLOv7-X nhanh hơn 31 fps. Ngoài ra, về mặt số lượng tham số và tính toán, YOLOv7-X giảm 22% tham số và 8% khối lượng tính toán so với YOLOv5-X (r6.1), nhưng cải thiện AP thêm 2.2% (Nguồn).
| Mô hình | Tham số (M) | FLOPs (G) | Kích thước (pixel) | FPS | APtest / val 50-95 | APtest 50 | APtest 75 | APtest S | APtest M | APtest L |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOX-S | 9.0 | 26.8 | 640 | 102 | 40.5% / 40.5% | - | - | - | - | - |
| YOLOX-M | 25.3 | 73.8 | 640 | 81 | 47.2% / 46.9% | - | - | - | - | - |
| YOLOX-L | 54.2 | 155.6 | 640 | 69 | 50.1% / 49.7% | - | - | - | - | - |
| YOLOX-X | 99.1 | 281.9 | 640 | 58 | 51.5% / 51.1% | - | - | - | - | - |
| PPYOLOE-S | 7.9 | 17.4 | 640 | 208 | 43.1% / 42.7% | 60.5% | 46.6% | 23.2% | 46.4% | 56.9% |
| PPYOLOE-M | 23.4 | 49.9 | 640 | 123 | 48.9% / 48.6% | 66.5% | 53.0% | 28.6% | 52.9% | 63.8% |
| PPYOLOE-L | 52.2 | 110.1 | 640 | 78 | 51.4% / 50.9% | 68.9% | 55.6% | 31.4% | 55.3% | 66.1% |
| PPYOLOE-X | 98.4 | 206.6 | 640 | 45 | 52.2% / 51.9% | 69.9% | 56.5% | 33.3% | 56.3% | 66.4% |
| YOLOv5-N (r6.1) | 1.9 | 4.5 | 640 | 159 | - / 28.0% | - | - | - | - | - |
| YOLOv5-S (r6.1) | 7.2 | 16.5 | 640 | 156 | - / 37.4% | - | - | - | - | - |
| YOLOv5-M (r6.1) | 21.2 | 49.0 | 640 | 122 | - / 45.4% | - | - | - | - | - |
| YOLOv5-L (r6.1) | 46.5 | 109.1 | 640 | 99 | - / 49.0% | - | - | - | - | - |
| YOLOv5-X (r6.1) | 86.7 | 205.7 | 640 | 83 | - / 50.7% | - | - | - | - | - |
| YOLOR-CSP | 52.9 | 120.4 | 640 | 106 | 51.1% / 50.8% | 69.6% | 55.7% | 31.7% | 55.3% | 64.7% |
| YOLOR-CSP-X | 96.9 | 226.8 | 640 | 87 | 53.0% / 52.7% | 71.4% | 57.9% | 33.7% | 57.1% | 66.8% |
| YOLOv7-tiny-SiLU | 6.2 | 13.8 | 640 | 286 | 38.7% / 38.7% | 56.7% | 41.7% | 18.8% | 42.4% | 51.9% |
| YOLOv7 | 36.9 | 104.7 | 640 | 161 | 51.4% / 51.2% | 69.7% | 55.9% | 31.8% | 55.5% | 65.0% |
| YOLOv7-X | 71.3 | 189.9 | 640 | 114 | 53.1% / 52.9% | 71.2% | 57.8% | 33.8% | 57.1% | 67.4% |
| YOLOv5-N6 (r6.1) | 3.2 | 18.4 | 1280 | 123 | - / 36.0% | - | - | - | - | - |
| YOLOv5-S6 (r6.1) | 12.6 | 67.2 | 1280 | 122 | - / 44.8% | - | - | - | - | - |
| YOLOv5-M6 (r6.1) | 35.7 | 200.0 | 1280 | 90 | - / 51.3% | - | - | - | - | - |
| YOLOv5-L6 (r6.1) | 76.8 | 445.6 | 1280 | 63 | - / 53.7% | - | - | - | - | - |
| YOLOv5-X6 (r6.1) | 140.7 | 839.2 | 1280 | 38 | - / 55.0% | - | - | - | - | - |
| YOLOR-P6 | 37.2 | 325.6 | 1280 | 76 | 53.9% / 53.5% | 71.4% | 58.9% | 36.1% | 57.7% | 65.6% |
| YOLOR-W6 | 79.8 | 453.2 | 1280 | 66 | 55.2% / 54.8% | 72.7% | 60.5% | 37.7% | 59.1% | 67.1% |
| YOLOR-E6 | 115.8 | 683.2 | 1280 | 45 | 55.8% / 55.7% | 73.4% | 61.1% | 38.4% | 59.7% | 67.7% |
| YOLOR-D6 | 151.7 | 935.6 | 1280 | 34 | 56.5% / 56.1% | 74.1% | 61.9% | 38.9% | 60.4% | 68.7% |
| YOLOv7-W6 | 70.4 | 360.0 | 1280 | 84 | 54.9% / 54.6% | 72.6% | 60.1% | 37.3% | 58.7% | 67.1% |
| YOLOv7-E6 | 97.2 | 515.2 | 1280 | 56 | 56.0% / 55.9% | 73.5% | 61.2% | 38.0% | 59.9% | 68.4% |
| YOLOv7-D6 | 154.7 | 806.8 | 1280 | 44 | 56.6% / 56.3% | 74.0% | 61.8% | 38.8% | 60.1% | 69.5% |
| YOLOv7-E6E | 151.7 | 843.2 | 1280 | 36 | 56.8% / 56.8% | 74.4% | 62.1% | 39.3% | 60.5% | 69.0% |
Link to this sectionTổng quan#
Phát hiện đối tượng thời gian thực là một thành phần quan trọng trong nhiều hệ thống computer vision, bao gồm theo dõi đa object tracking, xe tự lái, robotics và medical image analysis. Trong những năm gần đây, sự phát triển của công nghệ phát hiện đối tượng thời gian thực đã tập trung vào việc thiết kế các kiến trúc hiệu quả và cải thiện tốc độ suy luận của nhiều loại CPU, GPU và đơn vị xử lý thần kinh (NPU). YOLOv7 hỗ trợ cả thiết bị GPU di động và GPU, từ edge cho đến cloud.
Khác với các bộ phát hiện đối tượng thời gian thực truyền thống tập trung vào tối ưu hóa kiến trúc, YOLOv7 giới thiệu trọng tâm vào việc tối ưu hóa quy trình huấn luyện. Điều này bao gồm các module và phương pháp tối ưu hóa được thiết kế để cải thiện độ chính xác của việc phát hiện đối tượng mà không làm tăng chi phí suy luận, một khái niệm được gọi là "trainable bag-of-freebies".
Link to this sectionTính năng chính#
YOLOv7 giới thiệu một số tính năng chính:
-
Model Re-parameterization: YOLOv7 đề xuất một mô hình tái tham số hóa có kế hoạch, đây là một chiến lược có thể áp dụng cho các lớp trong các mạng khác nhau với khái niệm đường truyền lan truyền gradient.
-
Dynamic Label Assignment: Việc huấn luyện mô hình với nhiều lớp đầu ra tạo ra một vấn đề mới: "Làm thế nào để gán các mục tiêu động cho đầu ra của các nhánh khác nhau?" Để giải quyết vấn đề này, YOLOv7 giới thiệu một phương pháp gán nhãn mới gọi là gán nhãn có hướng dẫn từ thô đến tinh (coarse-to-fine lead guided label assignment).
-
Extended and Compound Scaling: YOLOv7 đề xuất các phương pháp "mở rộng" và "tỉ lệ hỗn hợp" cho bộ phát hiện đối tượng thời gian thực, giúp tận dụng hiệu quả các tham số và tính toán.
-
Efficiency: Phương pháp mà YOLOv7 đề xuất có thể giảm hiệu quả khoảng 40% tham số và 50% tính toán so với các bộ phát hiện đối tượng thời gian thực tiên tiến nhất, đồng thời có tốc độ suy luận nhanh hơn và độ chính xác phát hiện cao hơn.
Link to this sectionVí dụ Sử dụng#
Ultralytics không công bố các trọng số pretrained yolov7.pt hoặc các file YAML ultralytics/cfg/models/v7/, và việc huấn luyện cũng như suy luận PyTorch gốc cho YOLOv7 không được hỗ trợ bởi gói Python Ultralytics. Tuy nhiên, bạn có thể mang một checkpoint YOLOv7 đã huấn luyện trong kho lưu trữ YOLOv7 gốc vào Ultralytics bằng cách xuất nó sang ONNX hoặc TensorRT, như được hiển thị bên dưới.
Link to this sectionXuất ONNX#
Để sử dụng mô hình ONNX của YOLOv7 với Ultralytics:
-
(Tùy chọn) Cài đặt Ultralytics và xuất một mô hình ONNX để tự động cài đặt các phụ thuộc cần thiết:
pip install ultralytics yolo export model=yolo26n.pt format=onnx -
Xuất mô hình YOLOv7 mong muốn bằng cách sử dụng công cụ xuất trong kho lưu trữ YOLOv7:
git clone https://github.com/WongKinYiu/yolov7 cd yolov7 python export.py --weights yolov7-tiny.pt --grid --end2end --simplify --topk-all 100 --iou-thres 0.65 --conf-thres 0.35 --img-size 640 640 --max-wh 640 -
Sửa đổi đồ thị mô hình ONNX để tương thích với Ultralytics bằng cách sử dụng tập lệnh sau:
import numpy as np import onnx from onnx import helper, numpy_helper # Load the ONNX model model_path = "yolov7/yolov7-tiny.onnx" # Replace with your model path model = onnx.load(model_path) graph = model.graph # Fix input shape to batch size 1 input_shape = graph.input[0].type.tensor_type.shape input_shape.dim[0].dim_value = 1 # Define the output of the original model original_output_name = graph.output[0].name # Create slicing nodes sliced_output_name = f"{original_output_name}_sliced" # Define initializers for slicing (remove the first value) start = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_start") end = numpy_helper.from_array(np.array([7], dtype=np.int64), name="slice_end") axes = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_axes") steps = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_steps") graph.initializer.extend([start, end, axes, steps]) slice_node = helper.make_node( "Slice", inputs=[original_output_name, "slice_start", "slice_end", "slice_axes", "slice_steps"], outputs=[sliced_output_name], name="SliceNode", ) graph.node.append(slice_node) # Define segment slicing seg1_start = numpy_helper.from_array(np.array([0], dtype=np.int64), name="seg1_start") seg1_end = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg1_end") seg2_start = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg2_start") seg2_end = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg2_end") seg3_start = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg3_start") seg3_end = numpy_helper.from_array(np.array([6], dtype=np.int64), name="seg3_end") graph.initializer.extend([seg1_start, seg1_end, seg2_start, seg2_end, seg3_start, seg3_end]) # Create intermediate tensors for segments segment_1_name = f"{sliced_output_name}_segment1" segment_2_name = f"{sliced_output_name}_segment2" segment_3_name = f"{sliced_output_name}_segment3" # Add segment slicing nodes graph.node.extend( [ helper.make_node( "Slice", inputs=[sliced_output_name, "seg1_start", "seg1_end", "slice_axes", "slice_steps"], outputs=[segment_1_name], name="SliceSegment1", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg2_start", "seg2_end", "slice_axes", "slice_steps"], outputs=[segment_2_name], name="SliceSegment2", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg3_start", "seg3_end", "slice_axes", "slice_steps"], outputs=[segment_3_name], name="SliceSegment3", ), ] ) # Concatenate the segments concat_output_name = f"{sliced_output_name}_concat" concat_node = helper.make_node( "Concat", inputs=[segment_1_name, segment_3_name, segment_2_name], outputs=[concat_output_name], axis=1, name="ConcatSwapped", ) graph.node.append(concat_node) # Reshape to [1, -1, 6] reshape_shape = numpy_helper.from_array(np.array([1, -1, 6], dtype=np.int64), name="reshape_shape") graph.initializer.append(reshape_shape) final_output_name = f"{concat_output_name}_batched" reshape_node = helper.make_node( "Reshape", inputs=[concat_output_name, "reshape_shape"], outputs=[final_output_name], name="AddBatchDimension", ) graph.node.append(reshape_node) # Get the shape of the reshaped tensor shape_node_name = f"{final_output_name}_shape" shape_node = helper.make_node( "Shape", inputs=[final_output_name], outputs=[shape_node_name], name="GetShapeDim", ) graph.node.append(shape_node) # Extract the second dimension dim_1_index = numpy_helper.from_array(np.array([1], dtype=np.int64), name="dim_1_index") graph.initializer.append(dim_1_index) second_dim_name = f"{final_output_name}_dim1" gather_node = helper.make_node( "Gather", inputs=[shape_node_name, "dim_1_index"], outputs=[second_dim_name], name="GatherSecondDim", ) graph.node.append(gather_node) # Subtract from 100 to determine how many values to pad target_size = numpy_helper.from_array(np.array([100], dtype=np.int64), name="target_size") graph.initializer.append(target_size) pad_size_name = f"{second_dim_name}_padsize" sub_node = helper.make_node( "Sub", inputs=["target_size", second_dim_name], outputs=[pad_size_name], name="CalculatePadSize", ) graph.node.append(sub_node) # Build the [2, 3] pad array: # 1st row -> [0, 0, 0] (no padding at the start of any dim) # 2nd row -> [0, pad_size, 0] (pad only at the end of the second dim) pad_starts = numpy_helper.from_array(np.array([0, 0, 0], dtype=np.int64), name="pad_starts") graph.initializer.append(pad_starts) zero_scalar = numpy_helper.from_array(np.array([0], dtype=np.int64), name="zero_scalar") graph.initializer.append(zero_scalar) pad_ends_name = "pad_ends" concat_pad_ends_node = helper.make_node( "Concat", inputs=["zero_scalar", pad_size_name, "zero_scalar"], outputs=[pad_ends_name], axis=0, name="ConcatPadEnds", ) graph.node.append(concat_pad_ends_node) pad_values_name = "pad_values" concat_pad_node = helper.make_node( "Concat", inputs=["pad_starts", pad_ends_name], outputs=[pad_values_name], axis=0, name="ConcatPadStartsEnds", ) graph.node.append(concat_pad_node) # Create Pad operator to pad with zeros pad_output_name = f"{final_output_name}_padded" pad_constant_value = numpy_helper.from_array( np.array([0.0], dtype=np.float32), name="pad_constant_value", ) graph.initializer.append(pad_constant_value) pad_node = helper.make_node( "Pad", inputs=[final_output_name, pad_values_name, "pad_constant_value"], outputs=[pad_output_name], mode="constant", name="PadToFixedSize", ) graph.node.append(pad_node) # Update the graph's final output to [1, 100, 6] new_output_type = onnx.helper.make_tensor_type_proto( elem_type=graph.output[0].type.tensor_type.elem_type, shape=[1, 100, 6] ) new_output = onnx.helper.make_value_info(name=pad_output_name, type_proto=new_output_type) # Replace the old output with the new one graph.output.pop() graph.output.extend([new_output]) # Save the modified model onnx.save(model, "yolov7-ultralytics.onnx") -
Sau đó, bạn có thể tải mô hình ONNX đã sửa đổi và chạy suy luận với nó trong Ultralytics như bình thường:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.onnx", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionXuất TensorRT#
-
Làm theo các bước 1-2 trong phần Xuất ONNX.
-
Cài đặt gói Python
TensorRT:pip install tensorrt -
Chạy tập lệnh sau để chuyển đổi mô hình ONNX đã sửa đổi sang engine TensorRT:
from ultralytics.utils.export import export_engine export_engine("yolov7-ultralytics.onnx", half=True) -
Tải và chạy mô hình trong Ultralytics:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.engine", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionTrích dẫn và Ghi nhận#
Chúng tôi muốn ghi nhận đóng góp của các tác giả YOLOv7 đối với những đóng góp quan trọng của họ trong lĩnh vực phát hiện đối tượng thời gian thực:
@inproceedings{wang2023yolov7,
title={YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors},
author={Wang, Chien-Yao and Bochkovskiy, Alexey and Liao, Hong-Yuan Mark},
booktitle={Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition (CVPR)},
pages={7464--7475},
year={2023}
}Bài báo chính thức về YOLOv7 đã được xuất bản trên CVF 2023 Open Access, với bản preprint trên arXiv. Các tác giả đã công khai công trình của họ, và codebase có thể được truy cập trên GitHub. Chúng tôi trân trọng nỗ lực của họ trong việc thúc đẩy lĩnh vực này và làm cho công trình của họ trở nên dễ tiếp cận với cộng đồng rộng lớn hơn.
Link to this sectionCâu hỏi thường gặp#
Link to this sectionYOLOv7 là gì và tại sao nó được coi là một bước đột phá trong object detection thời gian thực?#
YOLOv7, được phát hành vào tháng 7 năm 2022, là một mô hình phát hiện đối tượng thời gian thực đáng kể đã đạt được tốc độ và độ chính xác xuất sắc tại thời điểm phát hành. Nó vượt qua các mô hình đương đại như YOLOX, YOLOv5 và PPYOLOE về cả việc sử dụng tham số và tốc độ suy luận. Các đặc điểm nổi bật của YOLOv7 bao gồm khả năng tái tham số hóa mô hình và gán nhãn động, giúp tối ưu hóa hiệu suất mà không làm tăng chi phí suy luận. Để biết thêm chi tiết kỹ thuật về kiến trúc và các chỉ số so sánh với các bộ phát hiện đối tượng tiên tiến khác, hãy tham khảo bài báo YOLOv7.
Link to this sectionYOLOv7 cải thiện như thế nào so với các mô hình YOLO trước đó như YOLOv4 và YOLOv5?#
YOLOv7 giới thiệu nhiều cải tiến, bao gồm tái tham số hóa mô hình và gán nhãn động, giúp tăng cường quy trình huấn luyện và cải thiện độ chính xác khi suy luận. So với YOLOv5, YOLOv7 tăng tốc độ và độ chính xác đáng kể. Ví dụ, YOLOv7-X cải thiện độ chính xác thêm 2.2% và giảm 22% tham số so với YOLOv5-X. So sánh chi tiết có thể được tìm thấy trong bảng hiệu suất So sánh YOLOv7 với các bộ phát hiện đối tượng SOTA.
Link to this sectionTôi có thể sử dụng YOLOv7 với các công cụ và nền tảng của Ultralytics không?#
Hiện tại, Ultralytics chỉ hỗ trợ suy luận YOLOv7 thông qua ONNX và TensorRT. Để chạy phiên bản YOLOv7 đã xuất sang ONNX và TensorRT với Ultralytics, hãy kiểm tra phần Ví dụ sử dụng.
Link to this sectionLàm thế nào để huấn luyện một mô hình YOLOv7 tùy chỉnh bằng tập dữ liệu của tôi?#
Để cài đặt và huấn luyện một mô hình YOLOv7 tùy chỉnh, hãy làm theo các bước sau:
-
Sao chép (clone) kho lưu trữ YOLOv7:
git clone https://github.com/WongKinYiu/yolov7 -
Điều hướng đến thư mục đã sao chép và cài đặt các phụ thuộc:
cd yolov7 pip install -r requirements.txt -
Chuẩn bị tập dữ liệu của bạn và cấu hình các tham số mô hình theo hướng dẫn sử dụng được cung cấp trong kho lưu trữ. Để được hướng dẫn thêm, hãy truy cập kho lưu trữ GitHub của YOLOv7 để biết thông tin và cập nhật mới nhất.
-
Sau khi huấn luyện, bạn có thể xuất mô hình sang ONNX hoặc TensorRT để sử dụng trong Ultralytics như đã hiển thị trong Ví dụ sử dụng.
Link to this sectionCác tính năng và tối ưu hóa chính được giới thiệu trong YOLOv7 là gì?#
YOLOv7 cung cấp một số tính năng chính tạo nên cuộc cách mạng trong phát hiện đối tượng thời gian thực:
- Model Re-parameterization: Nâng cao hiệu suất của mô hình bằng cách tối ưu hóa các đường lan truyền gradient.
- Dynamic Label Assignment: Sử dụng phương pháp hướng dẫn từ thô đến tinh để gán các mục tiêu động cho đầu ra trên các nhánh khác nhau, giúp cải thiện độ chính xác.
- Extended and Compound Scaling: Tận dụng hiệu quả các tham số và tính toán để mở rộng mô hình cho các ứng dụng thời gian thực khác nhau.
- Efficiency: Giảm số lượng tham số xuống 40% và giảm 50% khối lượng tính toán so với các mô hình tiên tiến khác trong khi vẫn đạt được tốc độ suy luận nhanh hơn.
Để biết thêm chi tiết về các tính năng này, hãy xem phần Tổng quan về YOLOv7.