Ensemble de données KITTI
![]()
Le jeu de données kitti est l'un des jeux de données de référence les plus influents pour la conduite autonome et la vision par ordinateur. Publié par l'Institut de technologie de Karlsruhe et l'Institut technologique Toyota de Chicago, il contient des données de caméra stéréo, de LiDAR et de GPS/IMU collectées à partir de scénarios de conduite réels.
Regarder : Comment entraîner Ultralytics YOLO26 sur le jeu de données KITTI 🚀
Il est largement utilisé pour évaluer les algorithmes en détection d'objets, estimation de profondeur, flux optique et odométrie visuelle. Le jeu de données est entièrement compatible avec Ultralytics YOLO26 pour les tâches de détection d'objets 2D et peut être facilement intégré à la plateforme Ultralytics pour l'entraînement et l'évaluation.
Structure du jeu de données
Avertissement
L'ensemble de test original de Kitti est exclu ici car il ne contient pas d'annotations de vérité terrain.
Au total, l'ensemble de données comprend 7 481 images, chacune étant associée à des annotations détaillées pour les objets tels que les voitures, les piétons, les cyclistes et d'autres éléments routiers. L'ensemble de données est divisé en deux sous-ensembles principaux :
- Ensemble d'entraînement : Contient 5 985 images avec des étiquettes annotées utilisées pour l'entraînement du modèle.
- Ensemble de validation : Comprend 1 496 images avec les annotations correspondantes utilisées pour l’évaluation des performances et l’analyse comparative.
Applications
L'ensemble de données Kitti permet des avancées dans la conduite autonome et la robotique, en prenant en charge des tâches telles que :
- Perception des véhicules autonomes : Former des modèles pour detect et track les véhicules, les piétons et les obstacles pour une navigation sûre dans les systèmes de conduite autonome.
- Compréhension de scène 3D : Prise en charge de l’estimation de la profondeur, de la vision stéréoscopique et de la localisation d’objets 3D pour aider les machines à comprendre les environnements spatiaux.
- Flux optique et prédiction de mouvement : Permettre l’analyse du mouvement pour prédire le mouvement des objets et améliorer la planification de la trajectoire dans des environnements dynamiques.
- Évaluation comparative de la vision par ordinateur : Sert de référence standard pour évaluer les performances dans plusieurs tâches de vision, y compris la détection d’objets et le suivi.
YAML du jeu de données
Ultralytics définit la configuration de l'ensemble de données kitti à l'aide d'un fichier YAML. Ce fichier spécifie les chemins d'accès aux ensembles de données, les étiquettes de classe et les métadonnées nécessaires à l'entraînement. Le fichier de configuration est disponible à l'adresse suivante : https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
ultralytics/cfg/datasets/kitti.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti/
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zip
Utilisation
Pour entraîner un modèle YOLO26n sur le jeu de données kitti pendant 100 époques avec une taille d'image de 640, utilisez les commandes suivantes. Pour plus de détails, reportez-vous à la page Entraînement.
Exemple d'entraînement
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)
yolo detect train data=kitti.yaml model=yolo26n.pt epochs=100 imgsz=640
Vous pouvez également effectuer des tâches d'évaluation, d'inference et d'exportation directement depuis la ligne de commande ou l'API python en utilisant le même fichier de configuration.
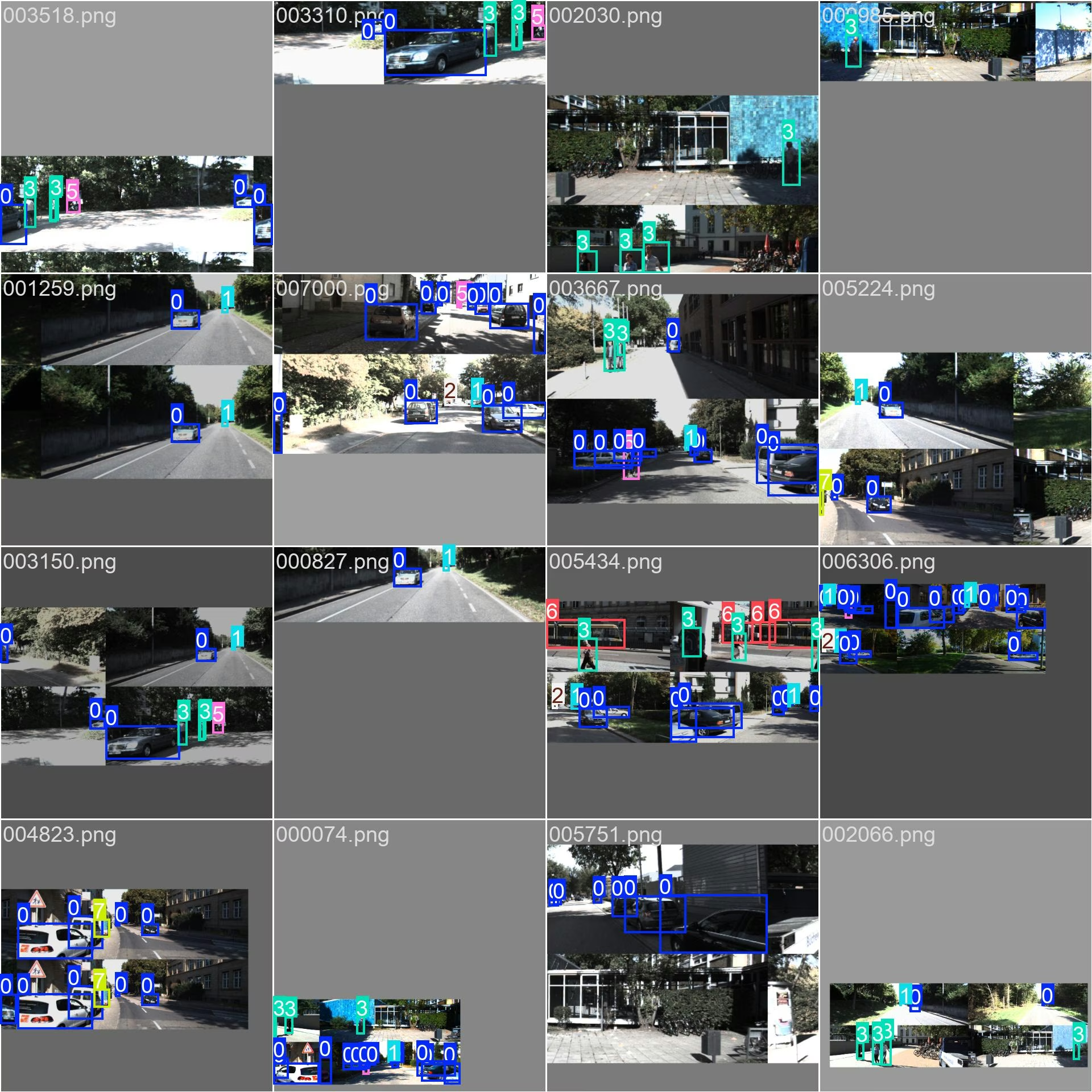
Images et annotations d'exemple
Le jeu de données kitti fournit divers scénarios de conduite. Chaque image comprend des annotations de cadres de sélection pour les tâches de détection d'objets en 2D. Les exemples illustrent la grande diversité du jeu de données, ce qui permet une généralisation robuste du modèle dans diverses conditions réelles.
Citations et remerciements
Si vous utilisez l'ensemble de données kitti dans vos recherches, veuillez citer l'article suivant :
Citation
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}
Nous remercions le KITTI Vision Benchmark Suite d'avoir fourni cet ensemble de données complet qui continue de façonner les progrès de la vision par ordinateur, de la robotique et des systèmes autonomes. Visitez le site web de kitti pour plus d'informations.
FAQ
À quoi sert l'ensemble de données kitti ?
Le jeu de données kitti est principalement utilisé pour la recherche en vision par ordinateur dans le domaine de la conduite autonome, prenant en charge des tâches telles que la object detection, l'estimation de la profondeur, le flux optique et la localisation 3D.
Combien d'images sont incluses dans l'ensemble de données kitti ?
L'ensemble de données comprend 5 985 images d'entraînement étiquetées et 1 496 images de validation capturées dans des scènes urbaines, rurales et autoroutières. L'ensemble de test original est exclu ici car il ne contient pas d'annotations de vérité terrain.
Quelles classes d'objets sont annotées dans l'ensemble de données ?
Kitti inclut des annotations pour des objets tels que les voitures, les piétons, les cyclistes, les camions, les tramways et divers usagers de la route.
Puis-je entraîner des modèles Ultralytics YOLO26 en utilisant le jeu de données kitti ?
Oui, kitti est entièrement compatible avec Ultralytics YOLO26. Vous pouvez entraîner et valider des modèles directement en utilisant le fichier de configuration YAML fourni.
Où puis-je trouver le fichier de configuration de l'ensemble de données kitti ?
Vous pouvez accéder au fichier YAML à l'adresse https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.


