Link to this sectionKITTI-Datensatz#
![]()
Das Ultralytics KITTI-Datenset ist ein 2D-Objekterkennungs-Datenset für das autonome Fahren mit 7.481 annotierten Bildern (5.985 für das Training und 1.496 für die Validierung) über 8 Klassen hinweg – car, van, truck, pedestrian, person_sitting, cyclist, tram und misc. Es wurde vom Karlsruher Institut für Technologie sowie dem Toyota Technological Institute at Chicago herausgegeben und enthält Bilder aus realen städtischen, ländlichen und Autobahn-Fahrsituationen.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
Die umfassendere KITTI Vision Benchmark Suite deckt auch Tiefenschätzung, optischen Fluss, Stereosehen und visuelle Odometrie ab, aber die Ultralytics kitti.yaml-Konfiguration hier ist für die 2D-Objekterkennung eingerichtet und vollständig kompatibel mit Ultralytics YOLO26.
Link to this sectionDatensatzstruktur#
Das ursprüngliche KITTI-Testset ist hier ausgeschlossen, da es keine öffentlichen Ground-Truth-Annotationen enthält.
Das Datenset enthält 7.481 annotierte Bilder, die Objekte wie Autos, Fußgänger und Radfahrer abdecken, unterteilt in zwei vordefinierte Teilmengen, die durch die kitti.yaml-Konfiguration definiert sind:
| Split | Bilder | Beschreibung |
|---|---|---|
| Trainieren | 5.985 | Beschriftete Bilder für das Modelltraining |
| Validation | 1.496 | Zurückgehaltene Bilder für Evaluierung und Benchmarking |
Link to this sectionObjektklassen#
Die Datei kitti.yaml definiert 8 Objektklassen, die Fahrzeuge, Personen und andere Verkehrsteilnehmer umfassen, die häufig in Fahrszenen zu sehen sind:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionAnwendungen#
Das KITTI-Datenset unterstützt eine Reihe von 2D-Erkennungsanwendungen für autonomes Fahren und Robotik:
- Wahrnehmung für autonome Fahrzeuge: Trainiere Modelle zur Erkennung und Verfolgung von Autos, Fußgängern und Radfahrern, damit Systeme für autonomes Fahren sicher navigieren können.
- ADAS-Entwicklung: Entwickle Fahrerassistenzfunktionen wie Kollisionswarnung und Fußgängererkennung auf der Basis von echtem Videomaterial aus dem Straßenverkehr.
- Verkehrs- und Straßenszenenanalyse: Erkenne und zähle Fahrzeuge und Verkehrsteilnehmer, um Verkehrsfluss und Verkehrssicherheit zu untersuchen.
- Computer Vision Benchmarking: Nutze KITTI als Standard-Benchmark zur Evaluierung von 2D-Objekterkennungs- und Tracking-Modellen.
Um deine eigenen Fahraufnahmen zu beschriften, zu trainieren und Datenset-Versionen in deinem Browser zu verwalten, führe den gesamten Workflow mit der Ultralytics Platform aus.
Link to this sectionDatensatz-YAML#
Ultralytics definiert die Konfiguration des KITTI-Datensets mithilfe einer YAML-Datei. Diese Datei gibt die Datenset-Pfade, Klassen-Labels und Metadaten an, die für das Training erforderlich sind. Die Konfigurationsdatei ist unter https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml verfügbar.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionVerwendung#
Um ein YOLO26n-Modell auf dem KITTI-Datenset für 100 Epochen mit einer Bildgröße von 640 zu trainieren, verwende die folgenden Befehle. Das Datenset (390,5 MB) wird bei der ersten Verwendung automatisch heruntergeladen. Weitere Details findest du auf der Seite Training.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Du kannst auch Evaluierungs-, Inferenz- und Export-Aufgaben direkt über die Befehlszeile oder die Python-API mit derselben Konfigurationsdatei durchführen.
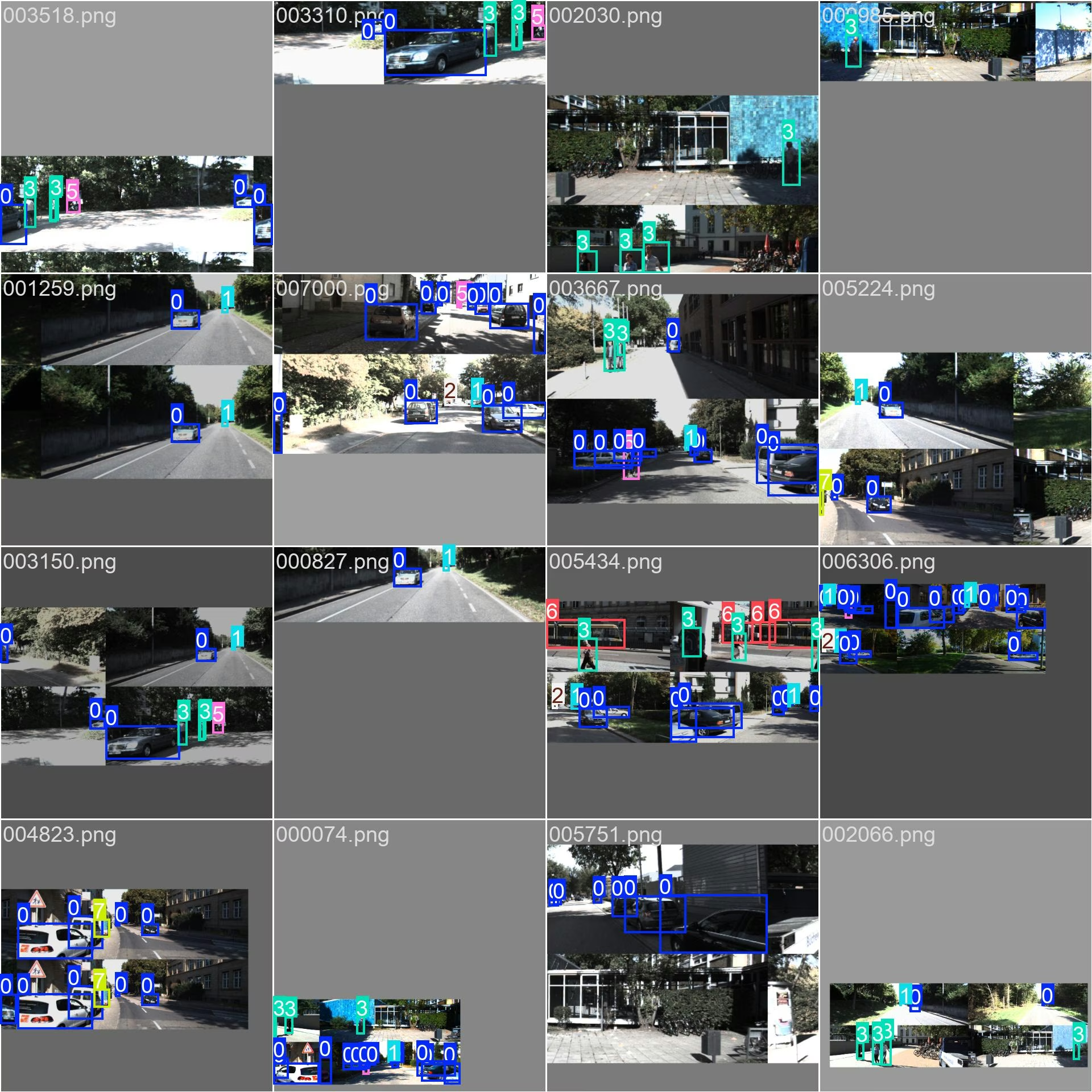
Link to this sectionBeispielbilder und Annotationen#
Das untenstehende Beispiel zeigt eine Fahrszene aus dem Datenset mit den zugehörigen 2D-Bounding-Box-Annotationen. KITTI-Bilder decken Stadt-, Land- und Autobahnszenen aus dem echten Straßenverkehr ab und bieten Modellen abwechslungsreiche Objektmaßstäbe, Blickwinkel und Lichtverhältnisse.
Link to this sectionZitate und Danksagungen#
Wenn du das KITTI-Datenset in deiner Forschung verwendest, zitiere bitte die folgende Arbeit:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Wir bedanken uns bei der KITTI Vision Benchmark Suite für die Bereitstellung dieses umfassenden Datensets, das weiterhin den Fortschritt in den Bereichen Computer Vision, Robotik und autonome Systeme prägt. Besuche die KITTI-Website für weitere Informationen.
Link to this sectionFAQ#
Link to this sectionWofür wird das KITTI-Datenset verwendet?#
Das Ultralytics KITTI-Datenset wird verwendet, um 2D-Objekterkennungsmodelle für das autonome Fahren zu trainieren und zu evaluieren. Es bietet 7.481 annotierte Bilder in 8 Klassen, einschließlich Autos, Fußgängern und Radfahrern, und wird häufig für das Benchmarking von Wahrnehmungsmodellen eingesetzt.
Link to this sectionWie viele Bilder und Klassen enthält das KITTI-Datenset?#
Die Ultralytics KITTI-Konfiguration enthält 7.481 Bilder – 5.985 für das Training und 1.496 für die Validierung – ohne separates Test-Split. Jedes Bild ist über 8 Klassen annotiert: car, van, truck, pedestrian, person_sitting, cyclist, tram und misc.
Link to this sectionEnthält das KITTI-Datenset ein Test-Split?#
Nein. Die Ultralytics KITTI-Konfiguration bietet nur Trainings- (5.985 Bilder) und Validierungs-Splits (1.496 Bilder). Das ursprüngliche KITTI-Testset ist ausgeschlossen, da es keine öffentlichen Ground-Truth-Annotationen enthält.
Link to this sectionWie lade ich das KITTI-Datenset herunter?#
Das Datenset (390,5 MB) wird beim ersten Training mit data="kitti.yaml" automatisch heruntergeladen – es sind keine manuellen Schritte erforderlich. Ultralytics lädt die Bilder und Labels herunter und entpackt sie in dein lokales Datenset-Verzeichnis. Du kannst verwandte Datensets in der Übersicht der Erkennungsdatensets durchsuchen.
Link to this sectionKann ich Ultralytics YOLO26-Modelle mit dem KITTI-Datenset trainieren?#
Ja, KITTI ist vollständig mit Ultralytics YOLO26 kompatibel. Du kannst Modelle direkt über die bereitgestellte YAML-Konfigurationsdatei trainieren und validieren.
Link to this sectionWo finde ich die Konfigurationsdatei für das KITTI-Datenset?#
Du kannst auf die Datei kitti.yaml unter https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml zugreifen. Sie definiert die Pfade zum Datenset und die 8 Klassennamen, die für das Training verwendet werden.