Link to this sectionDataset KITTI#
![]()
Il dataset Ultralytics KITTI è un dataset di object detection 2D per la guida autonoma, contenente 7.481 immagini annotate (5.985 per l'addestramento e 1.496 per la validazione) suddivise in 8 classi: car, van, truck, pedestrian, person_sitting, cyclist, tram e misc. Rilasciato dal Karlsruhe Institute of Technology e dal Toyota Technological Institute di Chicago, le sue immagini provengono da scenari di guida reali in contesti urbani, rurali e autostradali.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
Il più ampio KITTI Vision Benchmark Suite include anche stima della profondità, flusso ottico, visione stereo e odometria visiva, ma la configurazione Ultralytics kitti.yaml qui presente è impostata per l'object detection 2D ed è pienamente compatibile con Ultralytics YOLO26.
Link to this sectionStruttura del dataset#
Il test set originale KITTI è escluso in questo caso perché privo di annotazioni di ground-truth pubbliche.
Il dataset contiene 7.481 immagini annotate che coprono oggetti come auto, pedoni e ciclisti, suddivise in due subset predefiniti definiti dalla configurazione kitti.yaml:
| Split | Immagini | Descrizione |
|---|---|---|
| Addestramento | 5.985 | Immagini etichettate per l'addestramento del modello |
| Validazione | 1.496 | Immagini conservate per la valutazione e il benchmarking |
Link to this sectionClassi di oggetti#
Il file kitti.yaml definisce 8 classi di oggetti che comprendono veicoli, persone e altri utenti della strada comunemente visibili in scenari di guida:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionApplicazioni#
Il dataset KITTI supporta una serie di applicazioni di rilevamento 2D nella guida autonoma e nella robotica:
- Percezione dei veicoli autonomi: addestra modelli per rilevare e tracciare auto, pedoni e ciclisti affinché i sistemi di guida autonoma possano navigare in sicurezza.
- Sviluppo ADAS: crea funzionalità di assistenza alla guida come avvisi di collisione e rilevamento dei pedoni su filmati di guida reali.
- Analisi del traffico e degli scenari stradali: rileva e conta veicoli e utenti della strada per studiare il flusso del traffico e la sicurezza stradale.
- Benchmarking di computer vision: utilizza KITTI come benchmark standard per valutare modelli di object detection e tracking 2D.
Per etichettare le tue immagini di guida, addestrare e gestire le versioni del dataset nel tuo browser, esegui il flusso di lavoro completo con Ultralytics Platform.
Link to this sectionDataset YAML#
Ultralytics definisce la configurazione del dataset KITTI utilizzando un file YAML. Questo file specifica i percorsi del dataset, le etichette delle classi e i metadati necessari per l'addestramento. Il file di configurazione è disponibile all'indirizzo https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionUtilizzo#
Per addestrare un modello YOLO26n sul dataset KITTI per 100 epochs con una dimensione dell'immagine di 640, usa i seguenti comandi. Il dataset (390,5 MB) viene scaricato automaticamente al primo utilizzo. Per maggiori dettagli, consulta la pagina Training.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Puoi anche eseguire attività di valutazione, inferenza ed export direttamente dalla riga di comando o dall'API Python utilizzando lo stesso file di configurazione.
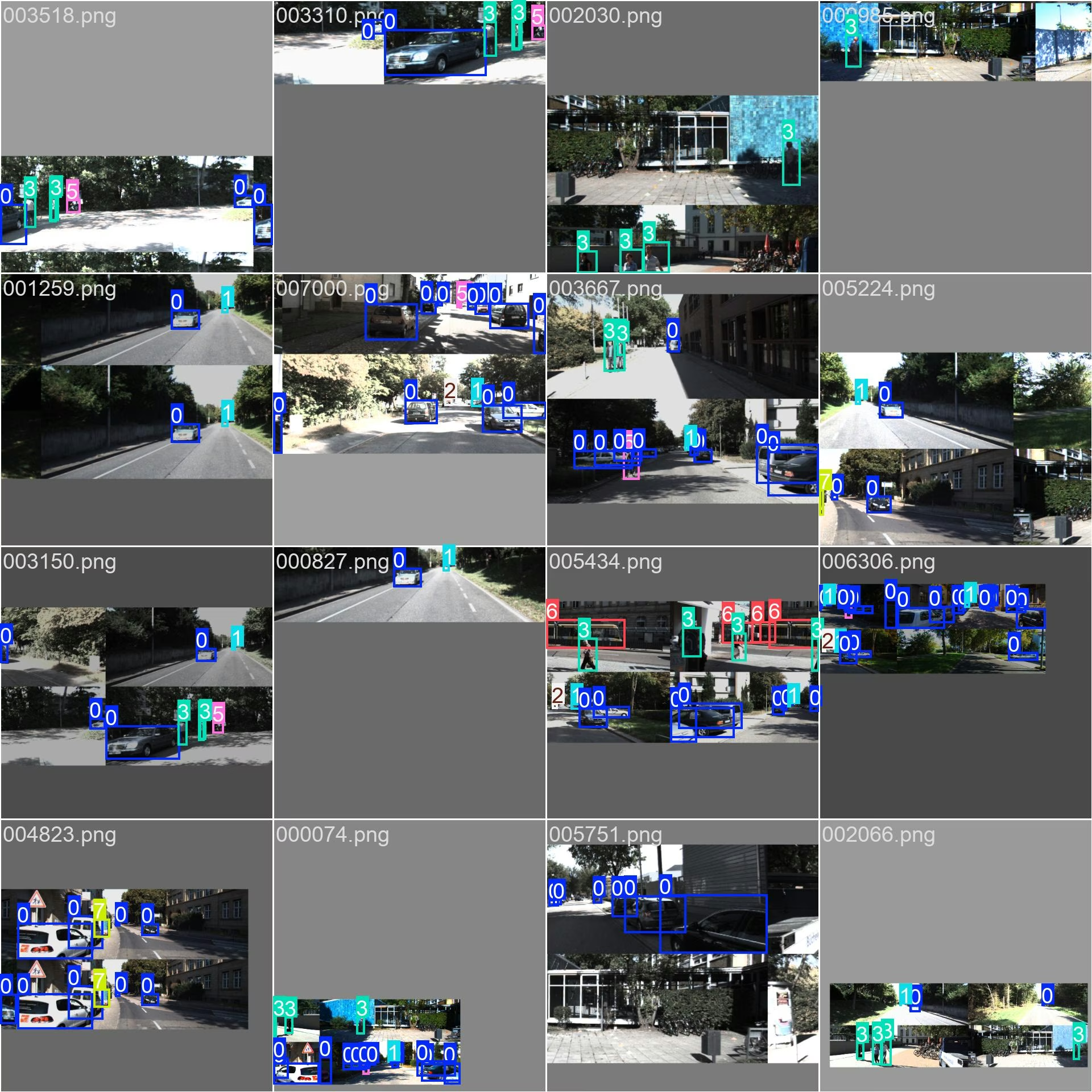
Link to this sectionEsempi di immagini e annotazioni#
L'esempio seguente mostra uno scenario di guida dal dataset con le relative annotazioni di bounding-box 2D. Le immagini KITTI coprono scenari urbani, rurali e autostradali ripresi nel traffico reale, offrendo ai modelli scale, punti di vista e illuminazioni variegate degli oggetti.
Link to this sectionCitazioni e riconoscimenti#
Se utilizzi il dataset KITTI nella tua ricerca, ti preghiamo di citare il seguente articolo:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Riconosciamo al KITTI Vision Benchmark Suite il merito di aver fornito questo dataset completo che continua a plasmare il progresso nella computer vision, nella robotica e nei sistemi autonomi. Visita il sito web di KITTI per ulteriori informazioni.
Link to this sectionFAQ#
Link to this sectionPer cosa viene utilizzato il dataset KITTI?#
Il dataset Ultralytics KITTI viene utilizzato per addestrare e valutare modelli di object detection 2D per la guida autonoma. Fornisce 7.481 immagini annotate su 8 classi, tra cui auto, pedoni e ciclisti, ed è ampiamente utilizzato per il benchmarking dei modelli di percezione.
Link to this sectionQuante immagini e classi ci sono nel dataset KITTI?#
La configurazione Ultralytics KITTI contiene 7.481 immagini — 5.985 per l'addestramento e 1.496 per la validazione — senza uno split di test separato. Ogni immagine è annotata su 8 classi: car, van, truck, pedestrian, person_sitting, cyclist, tram e misc.
Link to this sectionIl dataset KITTI include uno split di test?#
No. La configurazione Ultralytics KITTI fornisce solo split per il train (5.985 immagini) e la validazione (1.496 immagini). Il set di test originale KITTI è escluso perché privo di annotazioni di ground-truth pubbliche.
Link to this sectionCome scarico il dataset KITTI?#
Il dataset (390,5 MB) viene scaricato automaticamente la prima volta che addestri con data="kitti.yaml" — non è richiesto alcun passaggio manuale. Ultralytics recupera le immagini e le etichette e le decomprime nella tua directory locale dei dataset. Puoi sfogliare i dataset correlati nella panoramica dei dataset di rilevamento.
Link to this sectionPosso addestrare modelli Ultralytics YOLO26 utilizzando il dataset KITTI?#
Sì, KITTI è pienamente compatibile con Ultralytics YOLO26. Puoi addestrare e validare i modelli direttamente utilizzando il file di configurazione YAML fornito.
Link to this sectionDove posso trovare il file di configurazione del dataset KITTI?#
Puoi accedere al file kitti.yaml all'indirizzo https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml. Definisce i percorsi del dataset e gli 8 nomi delle classi utilizzati per l'addestramento.