Link to this sectionKITTI Dataset#
![]()
Ultralytics KITTIデータセットは、自動運転向けの2D物体検出データセットです。7,481枚のアノテーション済み画像(トレーニング用5,985枚、検証用1,496枚)が含まれており、車(car)、バン(van)、トラック(truck)、歩行者(pedestrian)、座っている人(person_sitting)、自転車(cyclist)、路面電車(tram)、その他(misc)の8クラスで構成されています。カールスルーエ工科大学とシカゴのトヨタ工業大学によって公開されており、実際の都市、郊外、高速道路での運転シーンの画像で構成されています。
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
より広範なKITTI Vision Benchmark Suiteには、深度推定、オプティカルフロー、ステレオビジョン、視覚的オドメトリなども含まれていますが、ここにあるUltralytics kitti.yaml構成は2D物体検出用に設定されており、Ultralytics YOLO26と完全な互換性があります。
Link to this sectionデータセットの構造#
元のKITTIテストセットは、公開されている正解アノテーションがないため、ここには含まれていません。
このデータセットには、車、歩行者、自転車などの物体をカバーする7,481枚のアノテーション済み画像が含まれており、kitti.yaml構成で定義された2つのサブセットに分割されています。
| 分割 | 画像 | 説明 |
|---|---|---|
| トレーニング | 5,985 | モデルトレーニング用のラベル付き画像 |
| バリデーション | 1,496 | 評価およびベンチマーク用のホールドアウト画像 |
Link to this sectionオブジェクトクラス#
kitti.yamlファイルは、運転シーンでよく見られる車両、歩行者、およびその他の道路利用者にわたる8つのオブジェクトクラスを定義しています。
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionアプリケーション#
KITTIデータセットは、自動運転やロボット工学における幅広い2D検出アプリケーションをサポートしています。
- 自動運転車の認識: 自動運転システムが安全に走行できるよう、車、歩行者、自転車を検出および追跡するモデルをトレーニングします。
- ADAS開発: 実際の運転映像を使用して、衝突警告や歩行者検出などの運転支援機能を構築します。
- 交通および道路シーンの分析: 車両や道路利用者を検出およびカウントし、交通流や交通安全を調査します。
- コンピュータビジョンのベンチマーク: 2D物体検出および追跡モデルを評価するための標準ベンチマークとしてKITTIを使用します。
自身の運転映像のラベル付け、トレーニング、データセットバージョンの管理をブラウザ上で行うには、Ultralytics Platformを使用して完全なワークフローを実行してください。
Link to this sectionデータセット YAML#
Ultralyticsは、YAMLファイルを使用してKITTIデータセット構成を定義します。このファイルには、トレーニングに必要なデータセットのパス、クラスラベル、メタデータが指定されています。構成ファイルはhttps://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yamlから入手できます。
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this section使用方法#
KITTIデータセットでYOLO26nモデルを100エポック、画像サイズ640でトレーニングするには、以下のコマンドを使用します。データセット(390.5 MB)は初回使用時に自動的にダウンロードされます。詳細については、トレーニングページを参照してください。
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)同じ構成ファイルを使用して、コマンドラインまたはPython APIから直接、評価、inference、および export タスクを実行することもできます。
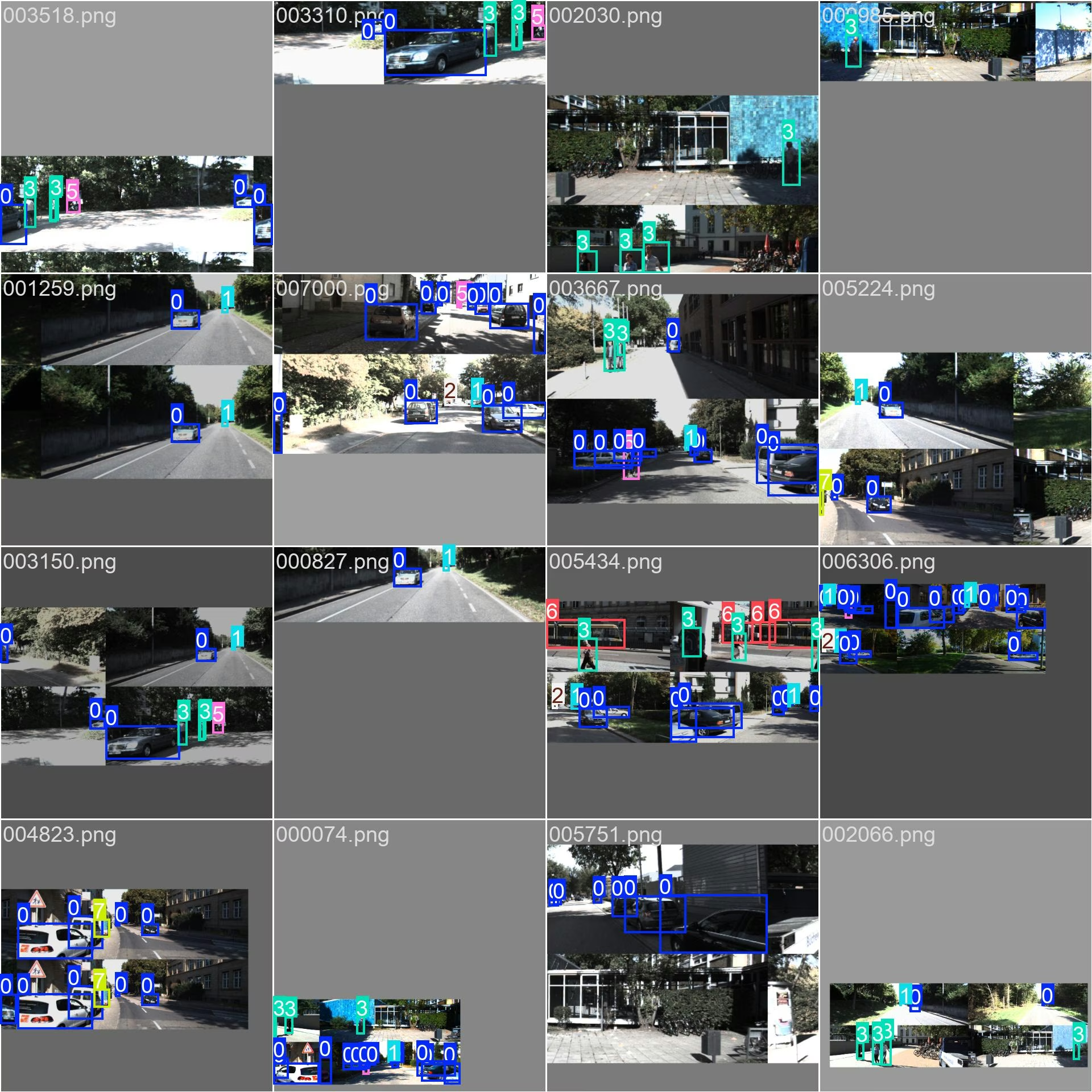
Link to this sectionサンプル画像とアノテーション#
以下のサンプルは、2Dバウンディングボックスのアノテーションが施されたデータセット内の運転シーンを示しています。KITTI画像は、実際の交通状況で撮影された都市、郊外、高速道路のシーンにまたがっており、モデルにさまざまな物体のスケール、視点、照明条件を提供します。
Link to this section引用と謝辞#
研究でKITTIデータセットを使用する場合は、以下の論文を引用してください。
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}コンピュータビジョン、ロボット工学、自律型システムの進歩を形作り続けているこの包括的なデータセットを提供してくれたKITTI Vision Benchmark Suiteに感謝します。詳細については、KITTIウェブサイトをご覧ください。
Link to this sectionよくある質問 (FAQ)#
Link to this sectionKITTIデータセットは何に使用されますか?#
Ultralytics KITTIデータセットは、自動運転向けの2D物体検出モデルをトレーニングおよび評価するために使用されます。車、歩行者、自転車など8クラスにわたる7,481枚のアノテーション済み画像を提供し、認識モデルのベンチマークに広く使用されています。
Link to this sectionKITTIデータセットには何枚の画像といくつのクラスが含まれていますか?#
Ultralytics KITTI構成には7,481枚の画像が含まれており、トレーニング用が5,985枚、検証用が1,496枚で、個別のテスト分割はありません。各画像には、車、バン、トラック、歩行者、座っている人、自転車、路面電車、その他という8つのクラスのアノテーションが付けられています。
Link to this sectionKITTIデータセットにはテスト分割が含まれていますか?#
いいえ。Ultralytics KITTI構成は、トレーニング(5,985枚の画像)と検証(1,496枚の画像)の分割のみを提供します。元のKITTIテストセットは、公開されている正解アノテーションがないため除外されています。
Link to this sectionKITTIデータセットをダウンロードするにはどうすればよいですか?#
データセット(390.5 MB)は、data="kitti.yaml"を使用して最初にトレーニングを行うときに自動的にダウンロードされるため、手動の操作は不要です。Ultralyticsが画像とラベルを取得し、ローカルのデータセットディレクトリに解凍します。関連するデータセットは検出データセットの概要から閲覧できます。
Link to this sectionKITTIデータセットを使用してUltralytics YOLO26モデルをトレーニングできますか?#
はい、KITTIはUltralytics YOLO26と完全な互換性があります。提供されているYAML構成ファイルを使用して、直接モデルのトレーニングと検証を行うことができます。
Link to this sectionKITTIデータセットの構成ファイルはどこにありますか?#
kitti.yamlファイルはhttps://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yamlからアクセスできます。これには、トレーニングに使用されるデータセットのパスと8つのクラス名が定義されています。