Link to this sectionDataset KITTI#
![]()
O conjunto de dados KITTI da Ultralytics é um conjunto de dados de detecção de objetos 2D para condução autônoma, contendo 7.481 imagens anotadas (5.985 para treinamento e 1.496 para validação) distribuídas em 8 classes — car, van, truck, pedestrian, person_sitting, cyclist, tram e misc. Lançado pelo Instituto de Tecnologia de Karlsruhe e pelo Instituto Tecnológico de Tecnologia de Chicago, suas imagens provêm de cenas reais de condução urbana, rural e em rodovias.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
A suíte de referência de visão KITTI mais ampla também abrange estimativa de profundidade, fluxo óptico, visão estéreo e odometria visual, mas a configuração kitti.yaml da Ultralytics aqui presente está definida para detecção de objetos 2D e é totalmente compatível com Ultralytics YOLO26.
Link to this sectionEstrutura do Dataset#
O conjunto de testes original do KITTI foi excluído aqui porque não possui anotações de ground-truth públicas.
O conjunto de dados contém 7.481 imagens anotadas cobrindo objetos como carros, pedestres e ciclistas, divididos em dois subconjuntos predefinidos pela configuração kitti.yaml:
| Divisão | Imagens | Descrição |
|---|---|---|
| Treinar | 5.985 | Imagens rotuladas para treinamento de modelos |
| Validação | 1.496 | Imagens reservadas para avaliação e benchmarking |
Link to this sectionClasses de Objetos#
O arquivo kitti.yaml define 8 classes de objetos abrangendo veículos, pessoas e outros usuários da estrada comumente vistos em cenas de direção:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionAplicações#
O conjunto de dados KITTI suporta uma variedade de aplicações de detecção 2D em condução autônoma e robótica:
- Percepção de veículos autônomos: Treine modelos para detectar e rastrear carros, pedestres e ciclistas para que sistemas de condução autônoma possam navegar com segurança.
- Desenvolvimento de ADAS: Crie recursos de assistência ao condutor, como aviso de colisão e detecção de pedestres, usando filmagens reais de direção.
- Análise de tráfego e cenas rodoviárias: Detecte e conte veículos e usuários da via para estudar o fluxo de tráfego e a segurança rodoviária.
- Benchmarking de visão computacional: Use o KITTI como um benchmark padrão para avaliar modelos de detecção de objetos e rastreamento 2D.
Para rotular suas próprias imagens de direção, treinar e gerenciar versões de conjuntos de dados em seu navegador, execute o fluxo de trabalho completo com a Ultralytics Platform.
Link to this sectionYAML do Dataset#
A Ultralytics define a configuração do conjunto de dados KITTI usando um arquivo YAML. Este arquivo especifica os caminhos do conjunto de dados, rótulos de classe e metadados necessários para o treinamento. O arquivo de configuração está disponível em https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionUso#
Para treinar um modelo YOLO26n no conjunto de dados KITTI por 100 épocas com um tamanho de imagem de 640, use os comandos a seguir. O conjunto de dados (390.5 MB) é baixado automaticamente no primeiro uso. Para mais detalhes, consulte a página Treinamento.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Também podes realizar tarefas de avaliação, inferência e exportação diretamente a partir da linha de comandos ou da API Python, utilizando o mesmo ficheiro de configuração.
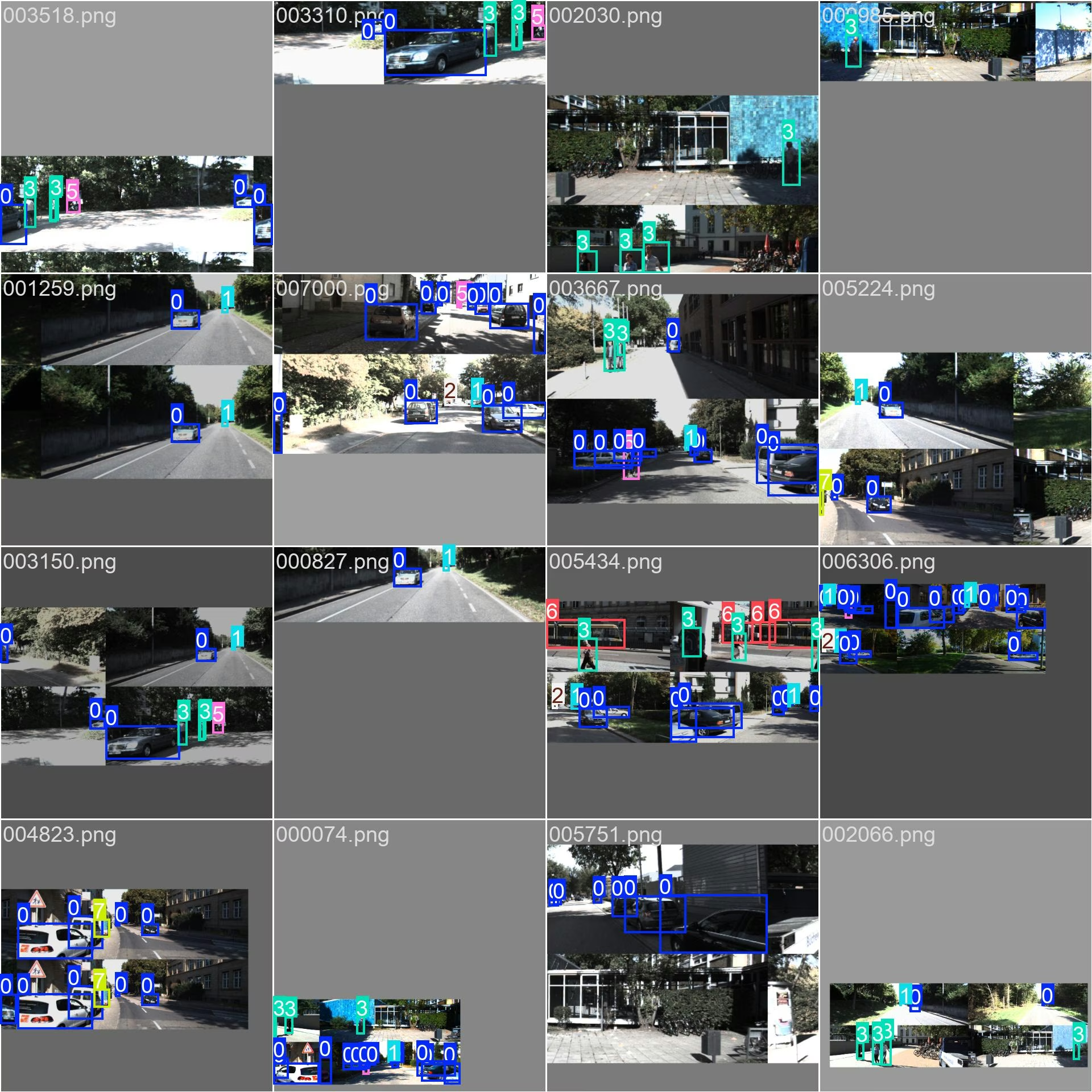
Link to this sectionExemplos de Imagens e Anotações#
O exemplo abaixo mostra uma cena de direção do conjunto de dados com suas anotações de caixa delimitadora 2D. As imagens do KITTI abrangem cenas urbanas, rurais e rodoviárias capturadas no tráfego real, proporcionando aos modelos escalas de objetos, pontos de vista e iluminação variados.
Link to this sectionCitações e Agradecimentos#
Se você utilizar o conjunto de dados KITTI em sua pesquisa, cite o seguinte artigo:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Agradecemos à suíte de referência de visão KITTI por fornecer este conjunto de dados abrangente que continua a moldar o progresso em visão computacional, robótica e sistemas autônomos. Visite o site do KITTI para mais informações.
Link to this sectionFAQ#
Link to this sectionPara que é usado o conjunto de dados KITTI?#
O conjunto de dados KITTI da Ultralytics é usado para treinar e avaliar modelos de detecção de objetos 2D para condução autônoma. Ele fornece 7.481 imagens anotadas em 8 classes, incluindo carros, pedestres e ciclistas, e é amplamente utilizado para benchmarking de modelos de percepção.
Link to this sectionQuantas imagens e classes existem no conjunto de dados KITTI?#
A configuração do KITTI da Ultralytics contém 7.481 imagens — 5.985 para treinamento e 1.496 para validação — sem divisão de teste separada. Cada imagem é anotada em 8 classes: car, van, truck, pedestrian, person_sitting, cyclist, tram e misc.
Link to this sectionO conjunto de dados KITTI inclui uma divisão de teste?#
Não. A configuração do KITTI da Ultralytics fornece apenas divisões de treino (5.985 imagens) e validação (1.496 imagens). O conjunto de testes original do KITTI foi excluído porque não possui anotações de ground-truth públicas.
Link to this sectionComo faço para baixar o conjunto de dados KITTI?#
O conjunto de dados (390.5 MB) é baixado automaticamente na primeira vez que você treina com data="kitti.yaml" — nenhuma etapa manual é necessária. A Ultralytics busca as imagens e os rótulos e os descompacta no diretório de conjuntos de dados local. Você pode explorar conjuntos de dados relacionados na visão geral de conjuntos de dados de detecção.
Link to this sectionPosso treinar modelos YOLO26 da Ultralytics usando o conjunto de dados KITTI?#
Sim, o KITTI é totalmente compatível com o YOLO26 da Ultralytics. Você pode treinar e validar modelos diretamente usando o arquivo de configuração YAML fornecido.
Link to this sectionOnde posso encontrar o arquivo de configuração do conjunto de dados KITTI?#
Você pode acessar o arquivo kitti.yaml em https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml. Ele define os caminhos do conjunto de dados e os 8 nomes de classes usados para o treinamento.