Link to this sectionUltralytics YOLO26 Tarafından Desteklenen Bilgisayarlı Görü Görevleri#
Ultralytics YOLO26, birden fazla bilgisayarlı görü görevini destekleyen çok yönlü bir yapay zeka çerçevesidir. Bu çerçeve tespit, segmentasyon, anlamsal segmentasyon, OBB, sınıflandırma ve poz tahmini işlemlerini gerçekleştirmek için kullanılabilir. Bu görevlerin her birinin farklı bir amacı ve kullanım alanı vardır; bu da çeşitli bilgisayarlı görü zorluklarını tek bir çerçeveyle ele almanı sağlar.
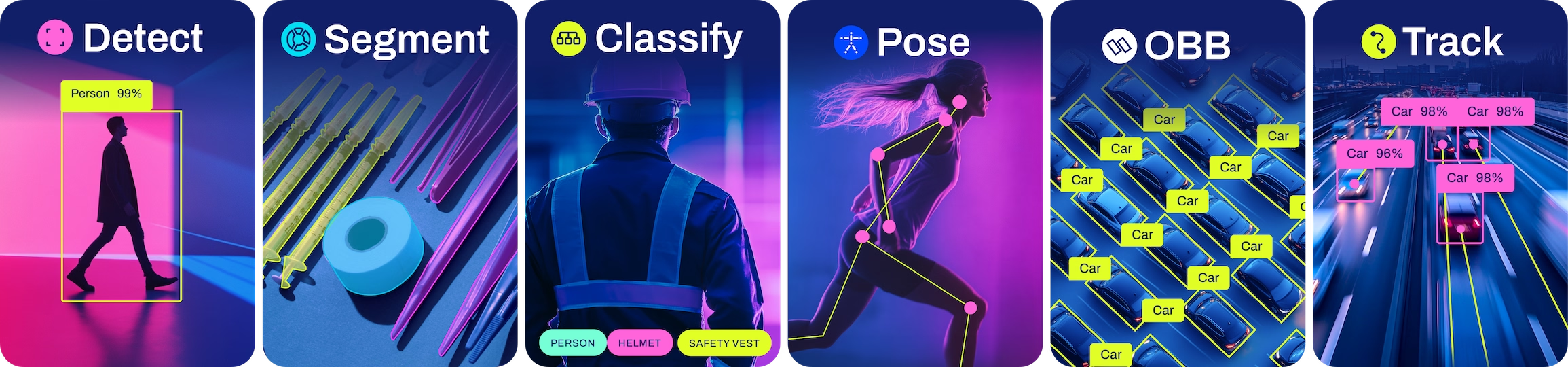
Watch: Explore Ultralytics YOLO Tasks: Object Detection, Segmentation, OBB, Tracking, and Pose Estimation.
Link to this sectionTespit#
Algılama, YOLO26 tarafından desteklenen birincil görevdir. Bu görev, bir görüntü veya video karesindeki nesnelerin tanımlanmasını ve çevrelerine BBox çizilmesini içerir. Algılanan nesneler, özelliklerine göre farklı kategorilere ayrılır. YOLO26, yüksek doğruluk ve hız ile tek bir görüntü veya video karesindeki birden fazla nesneyi algılayabilir; bu da onu gözetim sistemleri ve otonom araçlar gibi gerçek zamanlı uygulamalar için ideal hale getirir.
Link to this sectionGörüntü segmentasyonu#
Segmentasyon, her nesne için piksel düzeyinde maskeler üreterek nesne tespitini bir adım öteye taşır. Bu hassasiyet, tıbbi görüntüleme, tarımsal analiz ve üretim kalite kontrolü gibi uygulamalar için yararlıdır.
Link to this sectionAnlamsal Segmentasyon#
Anlamsal segmentasyon, bir görüntüdeki her piksele bir sınıf etiketi atayarak tüm sahnenin yoğun bir sınıf haritasını oluşturur. Örnek segmentasyonunun aksine, aynı sınıfa ait bireysel nesneleri birbirinden ayırmaz. Bu durum, tüm mekansal düzeni anlamanın bireysel nesneleri tanımlamaktan daha önemli olduğu otonom sürüş, sahne ayrıştırma ve arazi örtüsü haritalama için idealdir.
Anlamsal Segmentasyon Örnekleri
Link to this sectionSınıflandırma#
Sınıflandırma, tüm görüntülerin içeriklerine göre kategorize edilmesini içerir. Bu görev, e-ticarette ürün kategorizasyonu, içerik denetimi ve yaban hayatı izleme gibi uygulamalar için şarttır.
Link to this sectionPoz tahmini#
Poz tahmini, hareketleri takip etmek veya pozları tahmin etmek için görüntülerdeki veya video karelerindeki belirli anahtar noktaları tespit eder. Bu anahtar noktalar insan eklemlerini, yüz özelliklerini veya diğer önemli ilgi noktalarını temsil edebilir. YOLO26, yüksek doğruluk ve hız ile anahtar nokta tespitinde mükemmeldir; bu da onu fitness uygulamaları, spor analitiği ve insan-bilgisayar etkileşimi için değerli kılar.
Link to this sectionOBB#
Yönlendirilmiş Sınırlayıcı Kutu (OBB) tespiti, döndürülmüş nesneleri daha iyi bulmak için bir yönelim açısı ekleyerek geleneksel nesne tespitini geliştirir. Bu yetenek, özellikle nesnelerin çeşitli açılarda göründüğü hava görüntüsü analizi, belge işleme ve endüstriyel uygulamalar için değerlidir. YOLO26, çeşitli senaryolarda döndürülmüş nesneleri tespit etmek için yüksek doğruluk ve hız sunar.
Link to this sectionSonuç#
Ultralytics YOLO26; tespit, örnek segmentasyonu, anlamsal segmentasyon, sınıflandırma, yönlendirilmiş nesne tespiti ve anahtar nokta tespiti dahil olmak üzere birden fazla bilgisayarlı görü görevini destekler. Her görev, temel nesne tanımlamasından ayrıntılı poz analizine kadar bilgisayarlı görü ortamındaki belirli ihtiyaçları karşılar. Her görevin yeteneklerini ve uygulamalarını anlayarak, özel bilgisayarlı görü zorlukların için en uygun yaklaşımı seçebilir ve etkili çözümler oluşturmak için YOLO26'nın güçlü özelliklerinden yararlanabilirsin.
Link to this sectionSSS#
Link to this sectionUltralytics YOLO26 hangi bilgisayarlı görü görevlerini gerçekleştirebilir?#
Ultralytics YOLO26, çeşitli bilgisayarlı görü görevlerini yüksek doğruluk ve hızla gerçekleştirebilen çok yönlü bir yapay zeka çerçevesidir. Bu görevler şunları içerir:
- Nesne Tespiti: Görüntülerdeki veya video karelerindeki nesneleri etraflarına sınırlayıcı kutular çizerek tanımlama ve konumlandırma.
- Görüntü segmentasyonu: Görüntüleri içeriklerine göre farklı bölgelere ayırma; tıbbi görüntüleme gibi uygulamalar için yararlıdır.
- Anlamsal Segmentasyon: Yoğun sahne anlayışı için bir görüntüdeki her piksele bir sınıf etiketi atama.
- Sınıflandırma: Tüm görüntüleri içeriklerine göre kategorize etme.
- Poz tahmini: Hareketleri veya pozları izlemek için bir görüntü veya video karesindeki belirli anahtar noktaları tespit etme.
- Yönlendirilmiş Nesne Tespiti (OBB): Geliştirilmiş doğruluk için ek bir yönelim açısı ile döndürülmüş nesneleri tespit etme.
Link to this sectionUltralytics YOLO26'yı nesne tespiti için nasıl kullanırım?#
Ultralytics YOLO26'yı nesne tespiti için kullanmak amacıyla şu adımları izle:
- Veri setini uygun formatta hazırla.
- YOLO26 modelini tespit görevi için eğit.
- Yeni görüntüler veya video kareleri besleyerek tahmin yapmak için modeli kullan.
from ultralytics import YOLO
# Load a pretrained YOLO model (adjust model type as needed)
model = YOLO("yolo26n.pt") # n, s, m, l, x versions available
# Perform object detection on an image
results = model.predict(source="image.jpg") # Can also use video, directory, URL, etc.
# Display the results
results[0].show() # Show the first image resultsDaha ayrıntılı talimatlar için tespit örneklerimize göz at.
Link to this sectionSegmentasyon görevleri için YOLO26 kullanmanın faydaları nelerdir?#
Segmentasyon görevleri için YOLO26 kullanmak birkaç avantaj sağlar:
- Yüksek Doğruluk: Segmentasyon görevi, hassas, piksel düzeyinde maskeler sağlar.
- Hız: YOLO26 gerçek zamanlı uygulamalar için optimize edilmiştir ve yüksek çözünürlüklü görüntüler için bile hızlı işlem sunar.
- Çoklu Uygulama: Tıbbi görüntüleme, otonom sürüş ve ayrıntılı görüntü segmentasyonu gerektiren diğer uygulamalar için idealdir.
YOLO26'nın segmentasyon için faydaları ve kullanım durumları hakkında daha fazla bilgiyi görüntü segmentasyonu bölümünde bulabilirsin.
Link to this sectionUltralytics YOLO26 poz tahmini ve anahtar nokta tespiti işlemlerini yapabilir mi?#
Evet, Ultralytics YOLO26 poz tahmini ve anahtar nokta tespiti işlemlerini yüksek doğruluk ve hızla etkili bir şekilde gerçekleştirebilir. Bu özellik, özellikle spor analitiği, sağlık hizmetleri ve insan-bilgisayar etkileşimi uygulamalarındaki hareketleri izlemek için yararlıdır. YOLO26, bir görüntü veya video karesindeki anahtar noktaları tespit ederek hassas poz tahminine olanak tanır.
Daha fazla ayrıntı ve uygulama ipuçları için poz tahmini örneklerimizi ziyaret et.
Link to this sectionYönlendirilmiş nesne tespiti (OBB) için neden Ultralytics YOLO26'yı seçmeliyim?#
YOLO26 ile Yönlendirilmiş Nesne Tespiti (OBB), nesneleri ek bir açı parametresiyle tespit ederek gelişmiş hassasiyet sağlar. Bu özellik, hava görüntüsü analizi ve depo otomasyonu gibi döndürülmüş nesnelerin doğru konumlandırılmasını gerektiren uygulamalar için faydalıdır.
- Artırılmış Hassasiyet: Açı bileşeni, döndürülmüş nesneler için yanlış pozitifleri azaltır.
- Çok Yönlü Uygulamalar: Coğrafi analiz, robotik vb. görevler için yararlıdır.
Daha fazla ayrıntı ve örnek için Yönlendirilmiş Nesne Tespiti bölümüne göz at.