Ultralytics YOLO26 на NVIDIA Jetson с использованием DeepStream SDK и TensorRT
Смотреть: Как использовать модели Ultralytics YOLO26 с NVIDIA Deepstream на Jetson Orin NX 🚀
Это всеобъемлющее руководство содержит подробное описание развертывания Ultralytics YOLO26 на устройствах NVIDIA Jetson с использованием DeepStream SDK и TensorRT. Здесь мы используем TensorRT для максимизации производительности инференса на платформе Jetson.
Примечание
Это руководство было протестировано с NVIDIA Jetson Orin Nano Super Developer Kit под управлением последней стабильной версии JetPack JP6.1, Seeed Studio reComputer J4012, который основан на NVIDIA Jetson Orin NX 16GB под управлением JetPack JP5.1.3 и Seeed Studio reComputer J1020 v2, который основан на NVIDIA Jetson Nano 4GB под управлением JetPack JP4.6.4. Ожидается, что он будет работать на всей линейке оборудования NVIDIA Jetson, включая новейшие и устаревшие версии.
Что такое NVIDIA DeepStream?
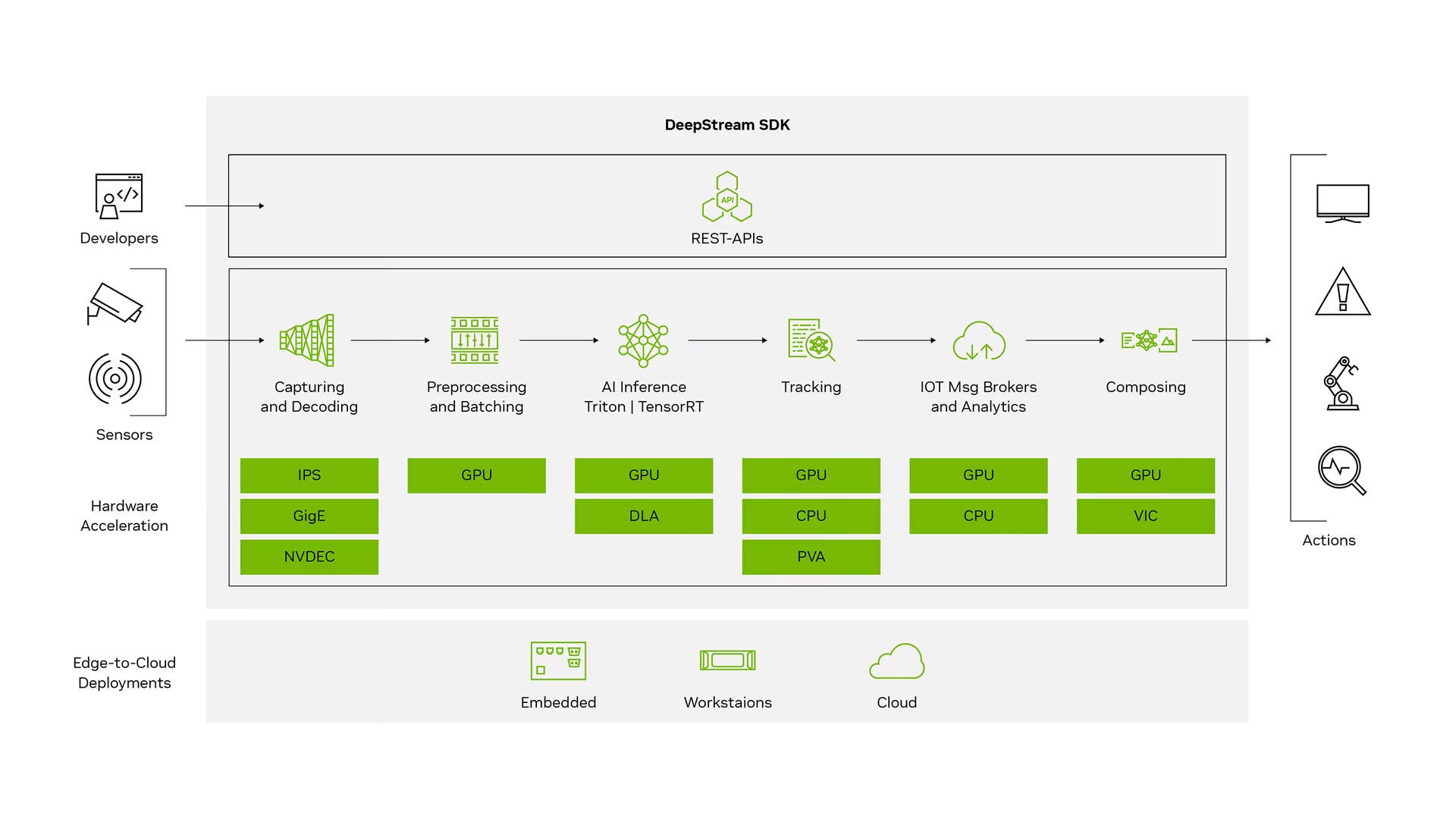
DeepStream SDK от NVIDIA — это полный набор инструментов для потоковой аналитики на основе GStreamer для многосенсорной обработки на основе AI, понимания видео, аудио и изображений. Он идеально подходит для разработчиков vision AI, партнеров по программному обеспечению, стартапов и OEM-производителей, создающих приложения и сервисы IVA (Intelligent Video Analytics). Теперь вы можете создавать конвейеры обработки потоков, которые включают нейронные сети и другие сложные задачи обработки, такие как отслеживание, кодирование/декодирование видео и рендеринг видео. Эти конвейеры обеспечивают аналитику в реальном времени для видео, изображений и данных с датчиков. Многоплатформенная поддержка DeepStream предоставляет вам более быстрый и простой способ разработки приложений и сервисов vision AI локально, на периферии и в облаке.
Предварительные требования
Прежде чем вы начнете следовать этому руководству:
- Посетите нашу документацию, Краткое руководство: NVIDIA Jetson с Ultralytics YOLO26, чтобы настроить ваше устройство NVIDIA Jetson с Ultralytics YOLO26.
- Установите DeepStream SDK в соответствии с версией JetPack
- Для JetPack 4.6.4 установите DeepStream 6.0.1
- Для JetPack 5.1.3 установите DeepStream 6.3
- Для JetPack 6.1 установите DeepStream 7.1
- Для JetPack 7.1 установите DeepStream 9.0
Совет
В этом руководстве мы использовали метод установки DeepStream SDK на устройство Jetson с помощью пакета Debian. Вы также можете посетить DeepStream SDK on Jetson (Archived), чтобы получить доступ к устаревшим версиям DeepStream.
Конфигурация DeepStream для YOLO26
Здесь мы используем репозиторий GitHub marcoslucianops/DeepStream-Yolo, который включает поддержку NVIDIA DeepStream SDK для моделей YOLO. Мы ценим усилия marcoslucianops за его вклад!
Установите Ultralytics с необходимыми зависимостями
cd ~ pip install -U pip git clone https://github.com/ultralytics/ultralytics cd ultralytics pip install -e ".[export]" onnxslimКлонируйте репозиторий DeepStream-Yolo
cd ~ git clone https://github.com/marcoslucianops/DeepStream-YoloСкопировать
export_yolo26.pyфайл изDeepStream-Yolo/utilsкаталог кultralyticsпапкаcp ~/DeepStream-Yolo/utils/export_yolo26.py ~/ultralytics cd ultralyticsЗагрузите выбранную вами модель обнаружения Ultralytics YOLO26 (.pt) из релизов YOLO26. Здесь мы используем yolo26s.pt.
wget https://github.com/ultralytics/assets/releases/download/v8.4.0/yolo26s.ptПримечание
Вы также можете использовать собственную обученную модель YOLO26.
Преобразовать модель в ONNX
python3 export_yolo26.py -w yolo26s.ptПередайте указанные ниже аргументы в вышеуказанную команду
Для DeepStream 5.1 удалите
--dynamicarg и useopset12 или ниже. По умолчаниюopsetравно 17.--opset 12Чтобы изменить размер логического вывода (по умолчанию: 640)
-s SIZE --size SIZE -s HEIGHT WIDTH --size HEIGHT WIDTHПример для 1280:
-s 1280 or -s 1280 1280Чтобы упростить модель ONNX (DeepStream >= 6.0)
--simplifyЧтобы использовать динамический размер пакета (DeepStream >= 6.1)
--dynamicЧтобы использовать статический размер пакета (пример для размера пакета = 4)
--batch 4Скопировать сгенерированный
.onnxфайл модели иlabels.txtфайл вDeepStream-Yoloпапкаcp yolo26s.pt.onnx labels.txt ~/DeepStream-Yolo cd ~/DeepStream-YoloУстановите версию CUDA в соответствии с установленной версией JetPack
Для JetPack 4.6.4:
export CUDA_VER=10.2Для JetPack 5.1.3:
export CUDA_VER=11.4Для JetPack 6.1:
export CUDA_VER=12.6Скомпилируйте библиотеку
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_YoloРедактировать
config_infer_primary_yolo26.txtфайл в соответствии с вашей моделью (для YOLO26s с 80 классами)[property] ... onnx-file=yolo26s.pt.onnx ... num-detected-classes=80 ...Редактировать
deepstream_app_configфайла... [primary-gie] ... config-file=config_infer_primary_yolo26.txtВы также можете изменить источник видео в
deepstream_app_configfile. Здесь загружается видеофайл по умолчанию... [source0] ... uri=file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
Запуск Inference
deepstream-app -c deepstream_app_config.txt
Примечание
Генерация файла движка TensorRT займет много времени перед началом инференса. Пожалуйста, будьте терпеливы.

Совет
Если вы хотите преобразовать модель в FP16 precision, просто установите model-engine-file=model_b1_gpu0_fp16.engine и network-mode=2 внутри config_infer_primary_yolo26.txt
Калибровка INT8
Если вы хотите использовать точность INT8 для инференса, вам необходимо выполнить следующие шаги:
Примечание
В настоящее время INT8 не работает с TensorRT 10.x. Этот раздел руководства был протестирован с TensorRT 8.x, который, как ожидается, будет работать.
Установить
OPENCVпеременная окруженияexport OPENCV=1Скомпилируйте библиотеку
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_YoloДля набора данных COCO, скачайте val2017, извлеките и переместите в
DeepStream-YoloпапкаСоздайте новый каталог для калибровочных изображений
mkdir calibrationВыполните следующее, чтобы выбрать 1000 случайных изображений из набора данных COCO для запуска калибровки
for jpg in $(ls -1 val2017/*.jpg | sort -R | head -1000); do cp ${jpg} calibration/ doneПримечание
NVIDIA рекомендует использовать не менее 500 изображений для достижения хорошей точности. В этом примере выбрано 1000 изображений для повышения точности (больше изображений = выше точность). Вы можете установить это значение с помощью head -1000. Например, для 2000 изображений используйте head -2000. Этот процесс может занять много времени.
Создать
calibration.txtфайл со всеми выбранными изображениямиrealpath calibration/*jpg > calibration.txtУстановить переменные среды
export INT8_CALIB_IMG_PATH=calibration.txt export INT8_CALIB_BATCH_SIZE=1Примечание
Более высокие значения INT8_CALIB_BATCH_SIZE приведут к большей точности и более высокой скорости калибровки. Установите его в соответствии с памятью вашей GPU.
Обновить
config_infer_primary_yolo26.txtфайлаОт
... model-engine-file=model_b1_gpu0_fp32.engine #int8-calib-file=calib.table ... network-mode=0 ...К
... model-engine-file=model_b1_gpu0_int8.engine int8-calib-file=calib.table ... network-mode=1 ...
Запуск Inference
deepstream-app -c deepstream_app_config.txt
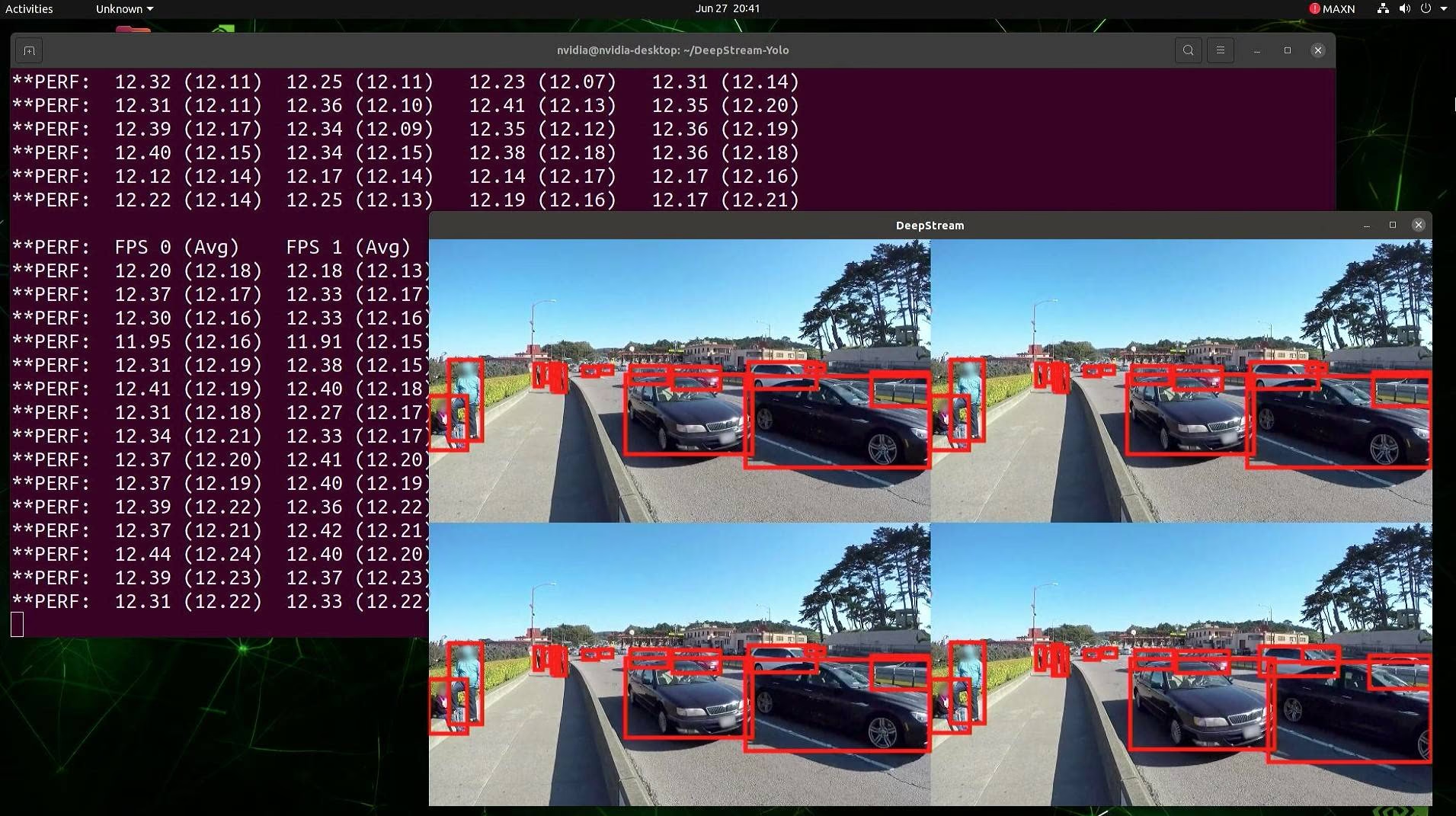
Настройка MultiStream
Смотреть: Как выполнить многопоточное вычисление с помощью Ultralytics на базе NVIDIA на Jetson Orin 🚀
Чтобы настроить несколько потоков в одном приложении DeepStream, внесите следующие изменения в deepstream_app_config.txt файл:
Измените строки и столбцы, чтобы создать сетку отображения в соответствии с количеством потоков, которые вы хотите иметь. Например, для 4 потоков мы можем добавить 2 строки и 2 столбца.
[tiled-display] rows=2 columns=2Установить
num-sources=4и добавьтеuriзаписи для всех четырех потоков.[source0] enable=1 type=3 uri=path/to/video1.jpg uri=path/to/video2.jpg uri=path/to/video3.jpg uri=path/to/video4.jpg num-sources=4
Запуск Inference
deepstream-app -c deepstream_app_config.txt
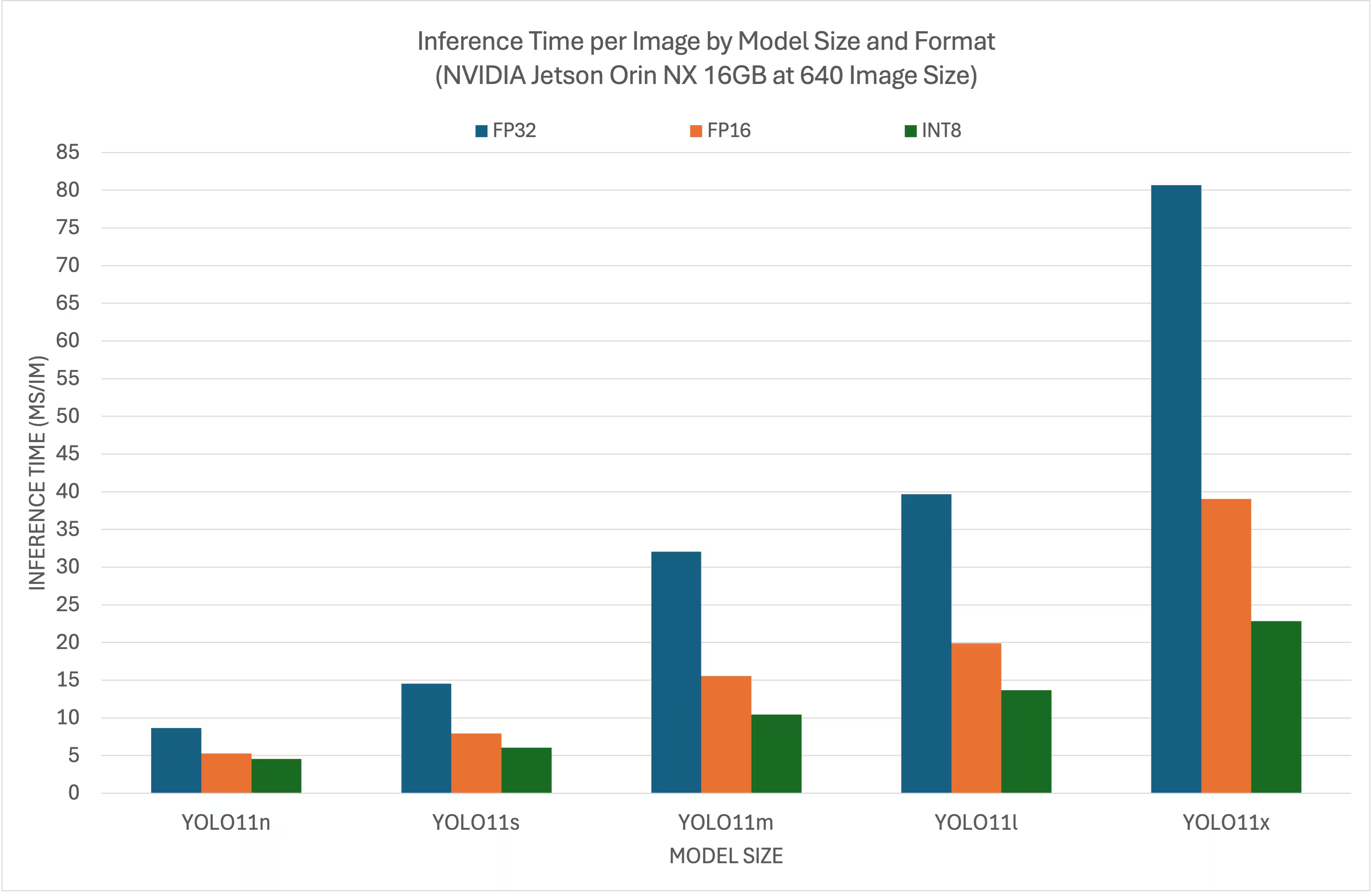
Результаты бенчмаркинга
Следующие бенчмарки суммируют производительность моделей YOLO26 на различных уровнях точности TensorRT с входным размером 640x640 на NVIDIA Jetson Orin NX 16GB.
Сравнительная таблица
Подробная сравнительная таблица
Производительность
| Формат | Статус | Время инференса (мс/изобр.) |
|---|---|---|
| TensorRT (FP32) | ✅ | 8.64 |
| TensorRT (FP16) | ✅ | 5.27 |
| TensorRT (INT8) | ✅ | 4.54 |
| Формат | Статус | Время инференса (мс/изобр.) |
|---|---|---|
| TensorRT (FP32) | ✅ | 14.53 |
| TensorRT (FP16) | ✅ | 7.91 |
| TensorRT (INT8) | ✅ | 6.05 |
| Формат | Статус | Время инференса (мс/изобр.) |
|---|---|---|
| TensorRT (FP32) | ✅ | 32.05 |
| TensorRT (FP16) | ✅ | 15.55 |
| TensorRT (INT8) | ✅ | 10.43 |
| Формат | Статус | Время инференса (мс/изобр.) |
|---|---|---|
| TensorRT (FP32) | ✅ | 39.68 |
| TensorRT (FP16) | ✅ | 19.88 |
| TensorRT (INT8) | ✅ | 13.64 |
| Формат | Статус | Время инференса (мс/изобр.) |
|---|---|---|
| TensorRT (FP32) | ✅ | 80.65 |
| TensorRT (FP16) | ✅ | 39.06 |
| TensorRT (INT8) | ✅ | 22.83 |
Благодарности
Это руководство было первоначально создано нашими друзьями из Seeed Studio, Лакшантхой и Элейн.
Часто задаваемые вопросы
Как настроить Ultralytics YOLO26 на устройстве NVIDIA Jetson?
Для настройки Ultralytics YOLO26 на устройстве NVIDIA Jetson сначала необходимо установить DeepStream SDK, совместимый с вашей версией JetPack. Следуйте пошаговому руководству в нашем Кратком руководстве, чтобы настроить ваш NVIDIA Jetson для развертывания YOLO26.
Какова польза от использования TensorRT с YOLO26 на NVIDIA Jetson?
Использование TensorRT с YOLO26 оптимизирует модель для инференса, значительно снижая задержку и повышая пропускную способность на устройствах NVIDIA Jetson. TensorRT обеспечивает высокопроизводительный инференс с низкой задержкой для глубокого обучения за счет слияния слоев, калибровки точности и автоматической настройки ядра. Это приводит к более быстрому и эффективному выполнению, что особенно полезно для приложений реального времени, таких как видеоаналитика и автономные машины.
Могу ли я запускать Ultralytics YOLO26 с DeepStream SDK на различном оборудовании NVIDIA Jetson?
Да, руководство по развертыванию Ultralytics YOLO26 с DeepStream SDK и TensorRT совместимо со всей линейкой NVIDIA Jetson. Это включает такие устройства, как Jetson Orin NX 16GB с JetPack 5.1.3 и Jetson Nano 4GB с JetPack 4.6.4. Подробные шаги см. в разделе Конфигурация DeepStream для YOLO26.
Как преобразовать модель YOLO26 в ONNX для DeepStream?
Чтобы преобразовать модель YOLO26 в формат ONNX для развертывания с DeepStream, используйте utils/export_yolo26.py скрипт из DeepStream-Yolo репозитории.
Вот пример команды:
python3 utils/export_yolo26.py -w yolo26s.pt --opset 12 --simplify
Для получения более подробной информации о преобразовании модели ознакомьтесь с нашим разделом об экспорте моделей.
Каковы эталонные показатели производительности для YOLO на NVIDIA Jetson Orin NX?
Производительность моделей YOLO26 на NVIDIA Jetson Orin NX 16GB варьируется в зависимости от уровней точности TensorRT. Например, модели YOLO26s достигают:
- Точность FP32: 14.6 мс/изобр., 68.5 FPS
- Точность FP16: 7.94 мс/изобр., 126 FPS
- Точность INT8: 5.95 мс/изобр., 168 FPS
Эти бенчмарки подчеркивают эффективность и возможности использования оптимизированных для TensorRT моделей YOLO26 на оборудовании NVIDIA Jetson. Для получения дополнительной информации см. раздел Результаты бенчмарков.








