Краткое руководство по началу работы: Raspberry Pi с Ultralytics YOLO26
Это подробное руководство содержит детальное описание развертывания Ultralytics YOLO26 на устройствах Raspberry Pi. Кроме того, оно демонстрирует эталонные показатели производительности, чтобы показать возможности YOLO26 на этих небольших и мощных устройствах.
Смотреть: Обновления и улучшения Raspberry Pi 5.
Примечание
Это руководство было протестировано на Raspberry Pi 4 и Raspberry Pi 5 под управлением последней версии Raspberry Pi OS Bookworm (Debian 12). Ожидается, что использование этого руководства для более старых устройств Raspberry Pi, таких как Raspberry Pi 3, также будет работать, если установлена та же Raspberry Pi OS Bookworm.
Что такое Raspberry Pi?
Raspberry Pi — это небольшой, доступный по цене одноплатный компьютер. Он стал популярным для широкого спектра проектов и приложений, от домашней автоматизации для любителей до промышленного использования. Платы Raspberry Pi способны запускать различные операционные системы и предлагают контакты GPIO (General Purpose Input/Output), которые обеспечивают простую интеграцию с датчиками, приводами и другими аппаратными компонентами. Они бывают разных моделей с различными спецификациями, но все они разделяют одну и ту же основную философию: быть недорогими, компактными и универсальными.
Сравнение серий Raspberry Pi
| Raspberry Pi 3 | Raspberry Pi 4 | Raspberry Pi 5 | |
|---|---|---|---|
| CPU | Broadcom BCM2837, Cortex-A53 64Bit SoC | Broadcom BCM2711, Cortex-A72 64Bit SoC | Broadcom BCM2712, Cortex-A76 64Bit SoC |
| Максимальная частота CPU | 1.4GHz | 1.8GHz | 2.4GHz |
| GPU | Videocore IV | Videocore VI | VideoCore VII |
| Максимальная частота GPU | 400Mhz | 500Mhz | 800Mhz |
| Память | 1GB LPDDR2 SDRAM | 1GB, 2GB, 4GB, 8GB LPDDR4-3200 SDRAM | 4GB, 8GB LPDDR4X-4267 SDRAM |
| PCIe | Н/Д | Н/Д | 1xPCIe 2.0 Interface |
| Максимальная потребляемая мощность | 2.5A@5V | 3A@5V | 5A@5V (с поддержкой PD) |
Что такое Raspberry Pi OS?
Raspberry Pi OS (ранее известная как Raspbian) — это Unix-подобная операционная система, основанная на дистрибутиве Debian GNU/Linux для семейства компактных одноплатных компьютеров Raspberry Pi, распространяемых Raspberry Pi Foundation. Raspberry Pi OS высоко оптимизирована для Raspberry Pi с процессорами ARM и использует модифицированную среду рабочего стола LXDE с менеджером окон Openbox. Raspberry Pi OS находится в активной разработке с акцентом на повышение стабильности и производительности как можно большего числа пакетов Debian на Raspberry Pi.
Прошивка Raspberry Pi OS на Raspberry Pi
Первое, что нужно сделать, получив в руки Raspberry Pi, — это прошить micro-SD карту с Raspberry Pi OS, вставить ее в устройство и загрузиться в ОС. Следуйте подробной документации по началу работы от Raspberry Pi, чтобы подготовить устройство к первому использованию.
Настройка Ultralytics
Существует два способа настройки пакета Ultralytics на Raspberry Pi для создания вашего следующего проекта в области компьютерного зрения. Вы можете использовать любой из них.
Начать с Docker
Самый быстрый способ начать работу с Ultralytics YOLO26 на Raspberry Pi — запустить его с помощью предварительно собранного образа docker для Raspberry Pi.
Выполните приведенную ниже команду, чтобы извлечь контейнер Docker и запустить его на Raspberry Pi. Он основан на образе Docker arm64v8/debian, который содержит Debian 12 (Bookworm) в среде Python3.
t=ultralytics/ultralytics:latest-arm64
sudo docker pull $t && sudo docker run -it --ipc=host $t
После этого перейдите к разделу Использование NCNN на Raspberry Pi.
Начать без Docker
Установка пакета Ultralytics
Здесь мы установим пакет Ultralytics на Raspberry Pi с дополнительными зависимостями, чтобы мы могли экспортировать модели PyTorch в другие различные форматы.
Обновите список пакетов, установите pip и обновите до последней версии
sudo apt update sudo apt install python3-pip -y pip install -U pipУстановите
ultralyticsпакет pip с необязательными зависимостямиpip install ultralytics[export]Перезагрузите устройство
sudo reboot
Использование NCNN на Raspberry Pi
Из всех форматов экспорта моделей, поддерживаемых Ultralytics, NCNN обеспечивает наилучшую производительность при работе с устройствами Raspberry Pi, поскольку NCNN высоко оптимизирован для мобильных / встроенных платформ (таких как архитектура ARM).
Преобразование модели в NCNN и запуск инференса
Модель YOLO26n в формате PyTorch преобразуется в NCNN для выполнения инференса с экспортированной моделью.
Пример
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo26n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo26n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")
# Export a YOLO26n PyTorch model to NCNN format
yolo export model=yolo26n.pt format=ncnn # creates 'yolo26n_ncnn_model'
# Run inference with the exported model
yolo predict model='yolo26n_ncnn_model' source='https://ultralytics.com/images/bus.jpg'
Совет
Для получения более подробной информации о поддерживаемых опциях экспорта посетите страницу документации Ultralytics, посвященную вариантам развертывания.
YOLO26 Улучшения производительности по сравнению с YOLO11
YOLO26 специально разработан для работы на устройствах с ограниченными аппаратными ресурсами, таких как Raspberry Pi 5. По сравнению с YOLO11n, YOLO26n обеспечивает увеличение FPS примерно на 15% (6.79 → 7.79), при этом демонстрируя более высокий mAP (40.1 против 39.5) при входном размере 640 с моделями, экспортированными в ONNX, на Raspberry Pi 5. Таблица и диаграмма ниже демонстрируют это сравнение.
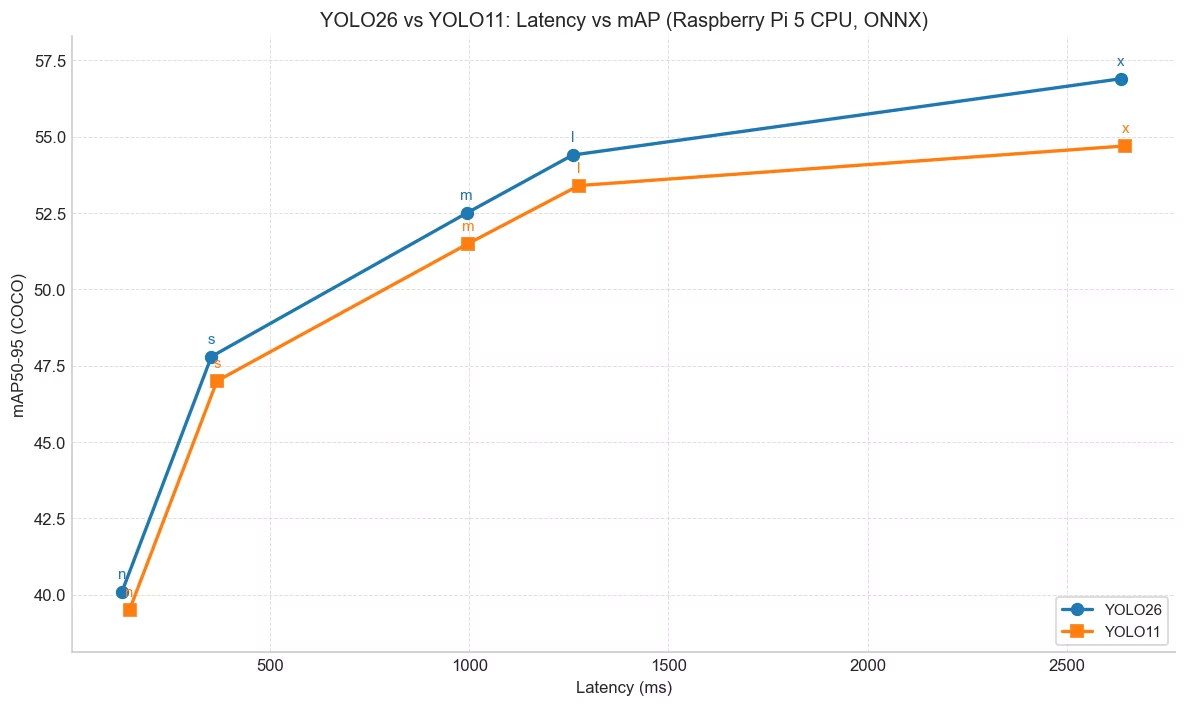
Производительность
| Модель | mAP50-95(B) | Время инференса (мс/изобр.) |
|---|---|---|
| YOLO26n | 40.1 | 128.42 |
| YOLO26s | 47.8 | 352.84 |
| YOLO26m | 52.5 | 993.78 |
| YOLO26l | 54.4 | 1259.46 |
| YOLO26x | 56.9 | 2636.26 |
| Модель | mAP50-95(B) | Время инференса (мс/изобр.) |
|---|---|---|
| YOLO11n | 39.5 | 147.20 |
| YOLO11s | 47.0 | 366.83 |
| YOLO11m | 51.5 | 997.46 |
| YOLO11l | 53.4 | 1274.95 |
| YOLO11x | 54.7 | 2646.76 |
Протестировано с Ultralytics 8.4.14.
Бенчмарки YOLO26 на Raspberry Pi 5
Бенчмарки YOLO26 были проведены командой Ultralytics для десяти различных форматов моделей с измерением скорости и точности: PyTorch, TorchScript, ONNX, OpenVINO, TF SavedModel, TF GraphDef, TF Lite, MNN, NCNN, ExecuTorch. Тесты проводились на Raspberry Pi 5 с точностью FP32 и стандартным размером входного изображения 640.
Сравнительная таблица
Мы включили бенчмарки только для моделей YOLO26n и YOLO26s, поскольку другие размеры моделей слишком велики для запуска на Raspberry Pi и не обеспечивают достаточной производительности.
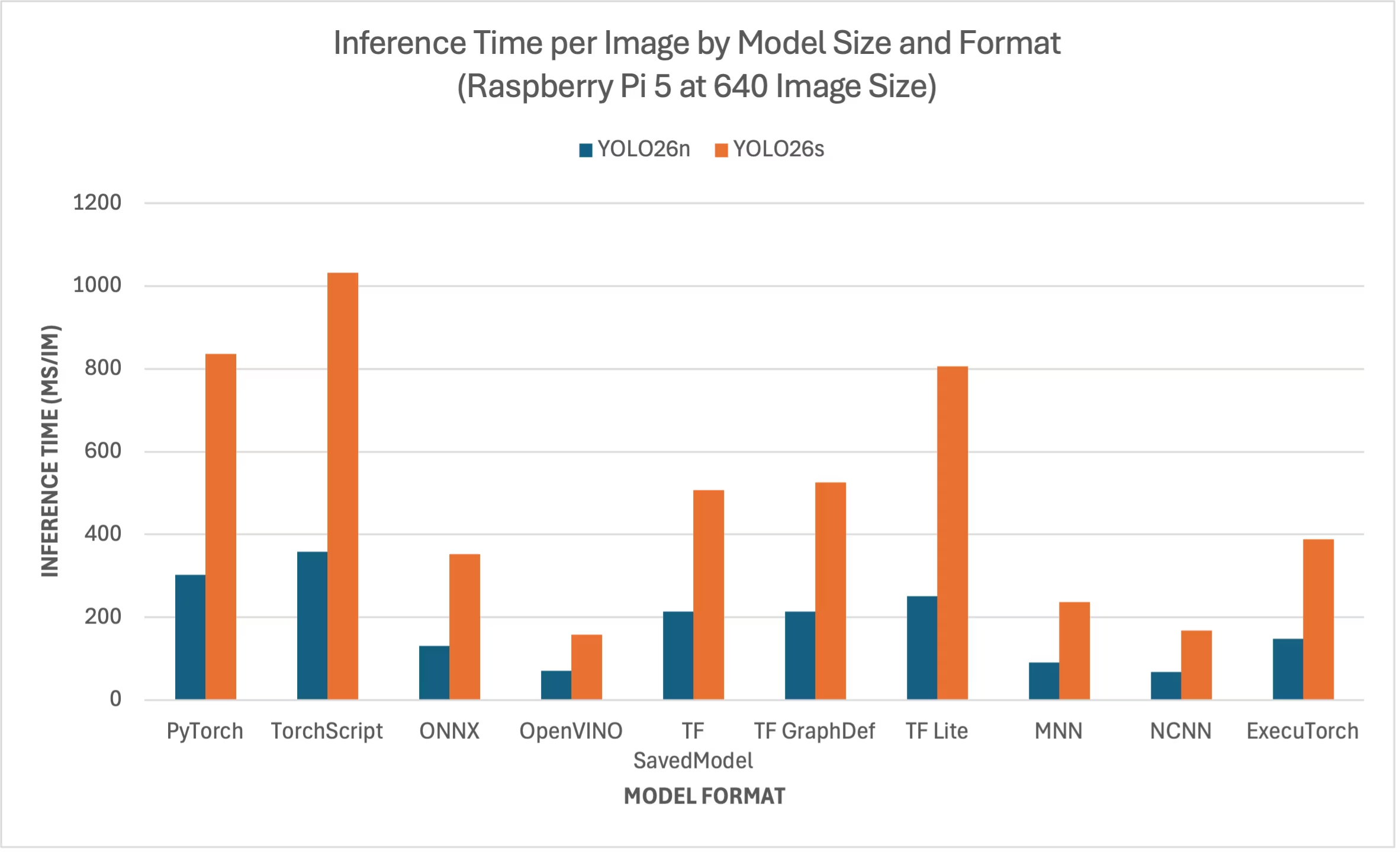
Подробная сравнительная таблица
В таблице ниже представлены результаты бенчмарков для двух различных моделей (YOLO26n, YOLO26s) в десяти различных форматах (PyTorch, TorchScript, ONNX, OpenVINO, TF SavedModel, TF GraphDef, TF Lite, MNN, NCNN, ExecuTorch), запущенных на Raspberry Pi 5, с указанием статуса, размера, метрики mAP50-95(B) и времени инференса для каждой комбинации.
Производительность
| Формат | Статус | Размер на диске (МБ) | mAP50-95(B) | Время инференса (мс/изобр.) |
|---|---|---|---|---|
| PyTorch | ✅ | 5.3 | 0.4798 | 302.15 |
| TorchScript | ✅ | 9.8 | 0.4764 | 357.58 |
| ONNX | ✅ | 9.5 | 0.4764 | 130.33 |
| OpenVINO | ✅ | 9.6 | 0.4818 | 70.74 |
| TF SavedModel | ✅ | 24.6 | 0.4764 | 213.58 |
| TF GraphDef | ✅ | 9.5 | 0.4764 | 213.5 |
| TF Lite | ✅ | 9.9 | 0.4764 | 251.41 |
| MNN | ✅ | 9.4 | 0.4784 | 90.89 |
| NCNN | ✅ | 9.4 | 0.4805 | 67.69 |
| ExecuTorch | ✅ | 9.4 | 0.4764 | 148.36 |
| Формат | Статус | Размер на диске (МБ) | mAP50-95(B) | Время инференса (мс/изобр.) |
|---|---|---|---|---|
| PyTorch | ✅ | 19.5 | 0.5740 | 836.54 |
| TorchScript | ✅ | 36.8 | 0.5665 | 1032.25 |
| ONNX | ✅ | 36.5 | 0.5665 | 351.96 |
| OpenVINO | ✅ | 36.7 | 0.5654 | 158.6 |
| TF SavedModel | ✅ | 92.2 | 0.5665 | 507.6 |
| TF GraphDef | ✅ | 36.5 | 0.5665 | 525.64 |
| TF Lite | ✅ | 36.9 | 0.5665 | 805.3 |
| MNN | ✅ | 36.4 | 0.5644 | 236.47 |
| NCNN | ✅ | 36.4 | 0.5697 | 168.47 |
| ExecuTorch | ✅ | 36.5 | 0.5665 | 388.72 |
Бенчмарки проведены с Ultralytics 8.4.1
Примечание
Время логического вывода не включает предварительную/постобработку.
Воспроизведение наших результатов
Чтобы воспроизвести вышеуказанные бенчмарки Ultralytics во всех форматах экспорта, запустите этот код:
Пример
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Benchmark YOLO26n speed and accuracy on the COCO128 dataset for all export formats
results = model.benchmark(data="coco128.yaml", imgsz=640)
# Benchmark YOLO26n speed and accuracy on the COCO128 dataset for all export formats
yolo benchmark model=yolo26n.pt data=coco128.yaml imgsz=640
Обратите внимание, что результаты бенчмаркинга могут варьироваться в зависимости от точной аппаратной и программной конфигурации системы, а также от текущей загрузки системы во время выполнения бенчмарков. Для получения наиболее надежных результатов используйте набор данных с большим количеством изображений, например, data='coco.yaml' (5000 изображений для проверки).
Использование камеры Raspberry Pi
При использовании Raspberry Pi для проектов компьютерного зрения крайне важно получать видеопотоки в реальном времени для выполнения инференса. Встроенный разъем MIPI CSI на Raspberry Pi позволяет подключать официальные модули камеры Raspberry Pi. В этом руководстве мы использовали модуль камеры Raspberry Pi 3 для захвата видеопотоков и выполнения инференса с использованием моделей YOLO26.
Совет
Узнайте больше о различных модулях камеры, предлагаемых Raspberry Pi, а также о том, как начать работу с модулями камеры Raspberry Pi.
Примечание
Raspberry Pi 5 использует более компактные CSI-разъемы, чем Raspberry Pi 4 (15-контактный против 22-контактного), поэтому для подключения к камере Raspberry Pi потребуется переходной кабель с 15-контактного на 22-контактный.
Тестирование камеры
Выполните следующую команду после подключения камеры к Raspberry Pi. Вы должны увидеть видеопоток с камеры в течение примерно 5 секунд.
rpicam-hello
Совет
Узнайте больше об rpicam-hello использовании в официальной документации Raspberry Pi
Инференс с использованием камеры
Существует 2 метода использования камеры Raspberry Pi для выполнения инференса на моделях YOLO26.
Использование
Мы можем использовать picamera2 который поставляется предустановленным с Raspberry Pi OS для доступа к камере и выполнения инференса на моделях YOLO26.
Пример
import cv2
from picamera2 import Picamera2
from ultralytics import YOLO
# Initialize the Picamera2
picam2 = Picamera2()
picam2.preview_configuration.main.size = (1280, 720)
picam2.preview_configuration.main.format = "RGB888"
picam2.preview_configuration.align()
picam2.configure("preview")
picam2.start()
# Load the YOLO26 model
model = YOLO("yolo26n.pt")
while True:
# Capture frame-by-frame
frame = picam2.capture_array()
# Run YOLO26 inference on the frame
results = model(frame)
# Visualize the results on the frame
annotated_frame = results[0].plot()
# Display the resulting frame
cv2.imshow("Camera", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) == ord("q"):
break
# Release resources and close windows
cv2.destroyAllWindows()
Нам нужно инициировать TCP-поток с помощью rpicam-vid с подключенной камеры, чтобы мы могли использовать этот URL-адрес потока в качестве входных данных при последующем инференсе. Выполните следующую команду, чтобы запустить TCP-поток.
rpicam-vid -n -t 0 --inline --listen -o tcp://127.0.0.1:8888
Узнайте больше об rpicam-vid использовании в официальной документации Raspberry Pi
Пример
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Run inference
results = model("tcp://127.0.0.1:8888")
yolo predict model=yolo26n.pt source="tcp://127.0.0.1:8888"
Совет
Ознакомьтесь с нашим документом об источниках логического вывода, если вы хотите изменить тип ввода изображения/видео
Рекомендации по использованию Raspberry Pi
Существует несколько лучших практик, которые следует соблюдать для обеспечения максимальной производительности на Raspberry Pi, работающих с YOLO26.
Используйте SSD
При использовании Raspberry Pi в режиме 24x7 рекомендуется использовать SSD для системы, поскольку SD-карта не сможет выдержать непрерывную запись и может сломаться. Благодаря встроенному разъему PCIe на Raspberry Pi 5 теперь вы можете подключать SSD-накопители с помощью адаптера, такого как NVMe Base для Raspberry Pi 5.
Прошивка без графического интерфейса
При прошивке Raspberry Pi OS вы можете не устанавливать среду рабочего стола (Raspberry Pi OS Lite), что позволит сэкономить немного оперативной памяти на устройстве, оставив больше места для обработки компьютерного зрения.
Разгон Raspberry Pi
Если вы хотите немного повысить производительность при запуске моделей Ultralytics YOLO26 на Raspberry Pi 5, вы можете разогнать CPU с базовых 2.4ГГц до 2.9ГГц, а GPU с 800МГц до 1ГГц. Если система становится нестабильной или зависает, уменьшайте значения разгона с шагом 100МГц. Обеспечьте надлежащее охлаждение, так как разгон увеличивает тепловыделение и может привести к термическому троттлингу.
a. Обновите программное обеспечение
sudo apt update && sudo apt dist-upgradeb. Откройте для редактирования файл конфигурации
sudo nano /boot/firmware/config.txtc. Добавьте следующие строки внизу
arm_freq=3000 gpu_freq=1000 force_turbo=1d. Сохраните и выйдите, нажав CTRL + X, затем Y и нажмите ENTER
e. Перезагрузите Raspberry Pi
Следующие шаги
Вы успешно настроили YOLO на вашем Raspberry Pi. Для дальнейшего обучения и поддержки посетите документацию Ultralytics YOLO26 и Kashmir World Foundation.
Благодарности и цитирования
Это руководство было первоначально создано Дааном Элтинком для Kashmir World Foundation, организации, занимающейся использованием YOLO для сохранения исчезающих видов. Мы признаем их новаторскую работу и образовательный подход в области технологий обнаружения объектов.
Для получения дополнительной информации о деятельности Kashmir World Foundation вы можете посетить их веб-сайт.
Часто задаваемые вопросы
Как настроить Ultralytics YOLO26 на Raspberry Pi без использования Docker?
Чтобы настроить Ultralytics YOLO26 на Raspberry Pi без Docker, выполните следующие шаги:
- Обновите список пакетов и выполните установку.
pip:sudo apt update sudo apt install python3-pip -y pip install -U pip - Установите пакет Ultralytics с дополнительными зависимостями:
pip install ultralytics[export] - Перезагрузите устройство, чтобы применить изменения:
sudo reboot
Для получения подробных инструкций обратитесь к разделу Запуск без Docker.
Почему следует использовать формат NCNN Ultralytics YOLO26 на Raspberry Pi для задач ИИ?
Формат NCNN Ultralytics YOLO26 высоко оптимизирован для мобильных и встраиваемых платформ, что делает его идеальным для выполнения задач ИИ на устройствах Raspberry Pi. NCNN максимизирует производительность инференса за счет использования архитектуры ARM, обеспечивая более быструю и эффективную обработку по сравнению с другими форматами. Для получения дополнительной информации о поддерживаемых параметрах экспорта посетите страницу документации Ultralytics по вариантам развертывания.
Как преобразовать модель YOLO26 в формат NCNN для использования на Raspberry Pi?
Вы можете преобразовать модель PyTorch YOLO26 в формат NCNN, используя команды Python или CLI:
Пример
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo26n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo26n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")
# Export a YOLO26n PyTorch model to NCNN format
yolo export model=yolo26n.pt format=ncnn # creates 'yolo26n_ncnn_model'
# Run inference with the exported model
yolo predict model='yolo26n_ncnn_model' source='https://ultralytics.com/images/bus.jpg'
Для получения более подробной информации см. раздел Использование NCNN на Raspberry Pi.
Каковы аппаратные различия между Raspberry Pi 4 и Raspberry Pi 5, имеющие отношение к запуску YOLO26?
Ключевые различия включают:
- CPU: Raspberry Pi 4 использует Broadcom BCM2711, Cortex-A72 64-bit SoC, а Raspberry Pi 5 использует Broadcom BCM2712, Cortex-A76 64-bit SoC.
- Максимальная частота CPU: Raspberry Pi 4 имеет максимальную частоту 1,8 ГГц, тогда как Raspberry Pi 5 достигает 2,4 ГГц.
- Память: Raspberry Pi 4 предлагает до 8 ГБ LPDDR4-3200 SDRAM, а Raspberry Pi 5 оснащен LPDDR4X-4267 SDRAM, доступной в вариантах 4 ГБ и 8 ГБ.
Эти улучшения способствуют повышению производительности моделей YOLO26 на Raspberry Pi 5 по сравнению с Raspberry Pi 4. Для получения дополнительной информации обратитесь к таблице сравнения серий Raspberry Pi.
Как настроить модуль камеры Raspberry Pi для работы с Ultralytics YOLO26?
Существует два метода настройки камеры Raspberry Pi для инференса YOLO26:
Используя
picamera2:import cv2 from picamera2 import Picamera2 from ultralytics import YOLO picam2 = Picamera2() picam2.preview_configuration.main.size = (1280, 720) picam2.preview_configuration.main.format = "RGB888" picam2.preview_configuration.align() picam2.configure("preview") picam2.start() model = YOLO("yolo26n.pt") while True: frame = picam2.capture_array() results = model(frame) annotated_frame = results[0].plot() cv2.imshow("Camera", annotated_frame) if cv2.waitKey(1) == ord("q"): break cv2.destroyAllWindows()Использование TCP-потока:
rpicam-vid -n -t 0 --inline --listen -o tcp://127.0.0.1:8888from ultralytics import YOLO model = YOLO("yolo26n.pt") results = model("tcp://127.0.0.1:8888")
Для получения подробных инструкций по настройке посетите раздел Логический вывод с помощью камеры.








