Link to this sectionمجموعة بيانات KITTI#
![]()
مجموعة بيانات Ultralytics KITTI هي مجموعة بيانات للكشف عن الكائنات ثنائية الأبعاد للقيادة الذاتية، وتحتوي على 7,481 صورة مشروحة (5,985 للتدريب و1,496 للتحقق) عبر 8 فئات - car (سيارة)، وvan (شاحنة صغيرة)، وtruck (شاحنة)، وpedestrian (مشاة)، وperson_sitting (شخص جالس)، وcyclist (راكب دراجة)، وtram (ترام)، وmisc (متنوع). تم إصدارها بواسطة معهد كارلسروه للتكنولوجيا ومعهد تويوتا التكنولوجي في شيكاغو، وتأتي صورها من مشاهد قيادة واقعية في المناطق الحضرية والريفية وعلى الطرق السريعة.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
تمتد مجموعة اختبار رؤية KITTI الأوسع أيضًا لتشمل تقدير العمق، والتدفق البصري، والرؤية المجسمة، وقياس المسافة بصريًا، ولكن إعداد kitti.yaml الخاص بـ Ultralytics هنا مخصص للكشف عن الكائنات ثنائية الأبعاد وهو متوافق تمامًا مع Ultralytics YOLO26.
Link to this sectionهيكل مجموعة البيانات#
تم استبعاد مجموعة اختبار KITTI الأصلية هنا نظرًا لعدم وجود تعليقات توضيحية حقيقية عامة لها.
تحتوي مجموعة البيانات على 7,481 صورة مشروحة تغطي كائنات مثل السيارات والمشاة وراكبي الدراجات، مقسمة إلى مجموعتين فرعيتين محددتين مسبقًا في إعداد kitti.yaml:
| التقسيم (Split) | الصور | الوصف |
|---|---|---|
| التدريب | 5,985 | صور مصنفة لتدريب النموذج |
| التحقق | 1,496 | صور مستبعدة للتقييم والمقارنة المرجعية |
Link to this sectionفئات الأغراض#
يحدد ملف kitti.yaml 8 فئات للكائنات تشمل المركبات والأشخاص وغيرهم من مستخدمي الطريق الذين يظهرون عادةً في مشاهد القيادة:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionالتطبيقات#
تدعم مجموعة بيانات KITTI مجموعة من تطبيقات الكشف ثنائي الأبعاد في القيادة الذاتية والروبوتات:
- إدراك المركبات ذاتية القيادة: تدريب النماذج على اكتشاف وتتبع السيارات والمشاة وراكبي الدراجات حتى تتمكن أنظمة القيادة الذاتية من التنقل بأمان.
- تطوير أنظمة مساعدة السائق المتقدمة (ADAS): بناء ميزات مساعدة السائق مثل التحذير من التصادم واكتشاف المشاة باستخدام لقطات قيادة واقعية.
- تحليل حركة المرور ومشاهد الطرق: اكتشاف وحساب المركبات ومستخدمي الطريق لدراسة تدفق حركة المرور وسلامة الطرق.
- المقارنة المرجعية لرؤية الكمبيوتر: استخدام KITTI كمعيار مرجعي لتقييم نماذج الكشف عن الكائنات والتتبع ثنائية الأبعاد.
لتصنيف صور القيادة الخاصة بك، وتدريب وإدارة إصدارات مجموعة البيانات في متصفحك، قم بتشغيل سير العمل الكامل باستخدام Ultralytics Platform.
Link to this sectionYAML مجموعة البيانات#
تحدد Ultralytics إعداد مجموعة بيانات KITTI باستخدام ملف YAML. يحدد هذا الملف مسارات مجموعة البيانات، وتسميات الفئات، والبيانات الوصفية المطلوبة للتدريب. ملف الإعداد متاح على الرابط https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionالاستخدام#
لتدريب نموذج YOLO26n على مجموعة بيانات KITTI لمدة 100 عصر (epochs) بحجم صورة 640، استخدم الأوامر التالية. يتم تنزيل مجموعة البيانات (390.5 ميجابايت) تلقائيًا عند الاستخدام لأول مرة. لمزيد من التفاصيل، راجع صفحة التدريب.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)يمكنك أيضًا إجراء مهام التقييم، والاستدلال، والتصدير مباشرة من سطر الأوامر أو واجهة برمجة تطبيقات Python باستخدام ملف التكوين نفسه.
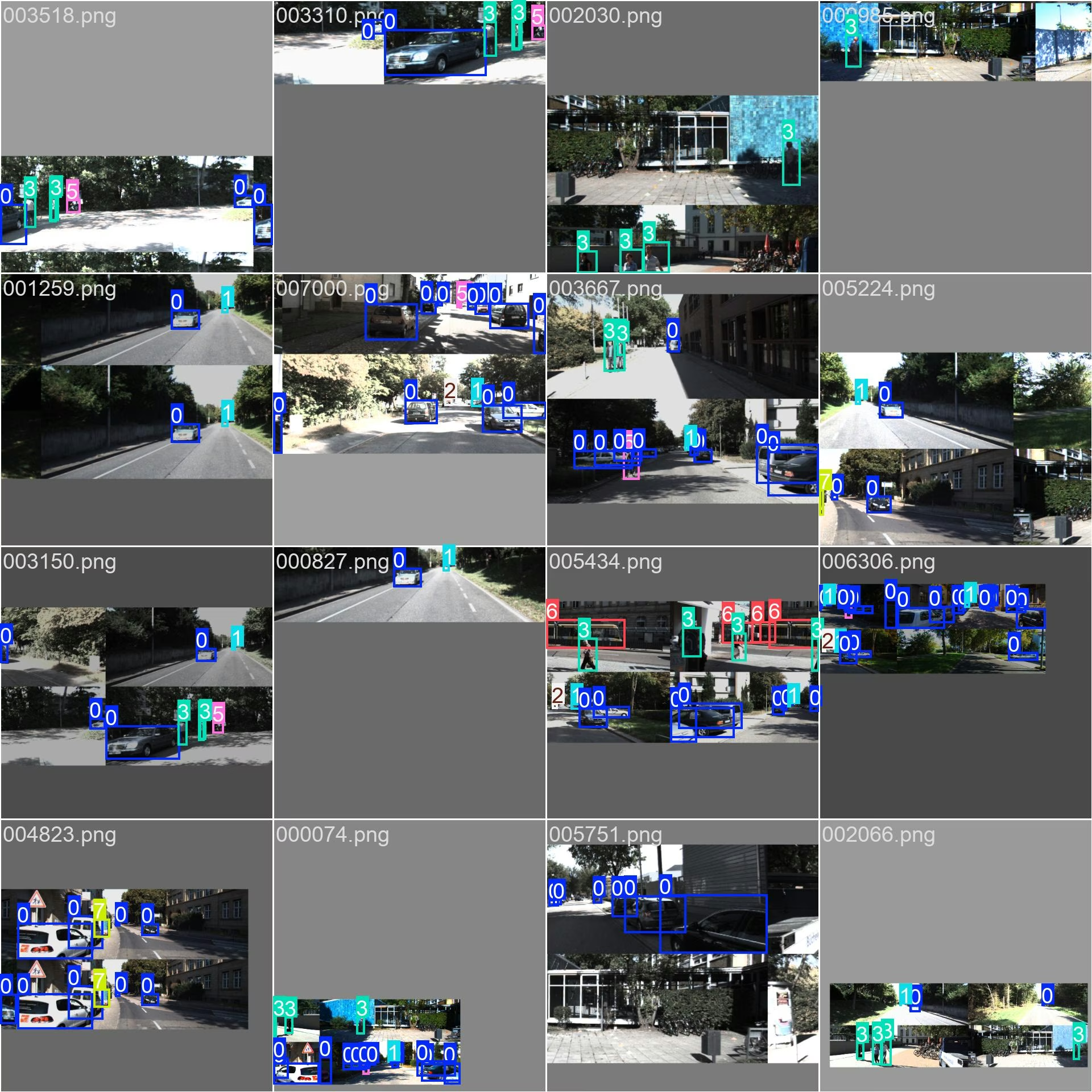
Link to this sectionصور وشروحات توضيحية عينة#
تُظهر العينة أدناه مشهد قيادة من مجموعة البيانات مع تعليقاتها التوضيحية الخاصة بصناديق الإحاطة ثنائية الأبعاد. تغطي صور KITTI مشاهد حضرية وريفية وعلى الطرق السريعة تم التقاطها في حركة مرور حقيقية، مما يمنح النماذج مقاييس كائنات ووجهات نظر وإضاءة متنوعة.
Link to this sectionالاقتباسات والشكر#
إذا كنت تستخدم مجموعة بيانات KITTI في بحثك، يرجى الاستشهاد بالورقة العلمية التالية:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}نحن نقر بفضل مجموعة اختبار رؤية KITTI لتوفيرها مجموعة البيانات الشاملة هذه التي تواصل تشكيل التقدم في رؤية الكمبيوتر، والروبوتات، والأنظمة الذاتية. تفضل بزيارة موقع KITTI الإلكتروني لمزيد من المعلومات.
Link to this sectionالأسئلة الشائعة#
Link to this sectionما الغرض من استخدام مجموعة بيانات KITTI؟#
تُستخدم مجموعة بيانات Ultralytics KITTI لتدريب وتقييم نماذج الكشف عن الكائنات ثنائية الأبعاد للقيادة الذاتية. فهي توفر 7,481 صورة مشروحة عبر 8 فئات، بما في ذلك السيارات والمشاة وراكبي الدراجات، وتُستخدم على نطاق واسع للمقارنة المرجعية لنماذج الإدراك.
Link to this sectionكم عدد الصور والفئات الموجودة في مجموعة بيانات KITTI؟#
يحتوي إعداد Ultralytics KITTI على 7,481 صورة - 5,985 للتدريب و1,496 للتحقق - بدون تقسيم منفصل للاختبار. كل صورة مشروحة عبر 8 فئات: car، وvan، وtruck، وpedestrian، وperson_sitting، وcyclist، وtram، وmisc.
Link to this sectionهل تتضمن مجموعة بيانات KITTI تقسيمًا للاختبار؟#
لا. يوفر إعداد Ultralytics KITTI فقط تقسيمات للتدريب (5,985 صورة) والتحقق (1,496 صورة). تم استبعاد مجموعة اختبار KITTI الأصلية نظرًا لعدم وجود تعليقات توضيحية حقيقية عامة لها.
Link to this sectionكيف يمكنني تنزيل مجموعة بيانات KITTI؟#
يتم تنزيل مجموعة البيانات (390.5 ميجابايت) تلقائيًا في المرة الأولى التي تقوم فيها بالتدريب باستخدام data="kitti.yaml" - لا يلزم القيام بخطوات يدوية. تقوم Ultralytics بجلب الصور والتسميات وتفريغها في دليل مجموعات البيانات المحلية الخاص بك. يمكنك تصفح مجموعات البيانات ذات الصلة في نظرة عامة على مجموعات بيانات الكشف.
Link to this sectionهل يمكنني تدريب نماذج Ultralytics YOLO26 باستخدام مجموعة بيانات KITTI؟#
نعم، KITTI متوافقة تمامًا مع Ultralytics YOLO26. يمكنك التدريب والتحقق من النماذج مباشرة باستخدام ملف إعداد YAML المقدم.
Link to this sectionأين يمكنني العثور على ملف إعداد مجموعة بيانات KITTI؟#
يمكنك الوصول إلى ملف kitti.yaml على الرابط https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml. وهو يحدد مسارات مجموعة البيانات وأسماء الفئات الثمانية المستخدمة للتدريب.