إدارة مواقف السيارات باستخدام Ultralytics YOLO26 🚀
ما هو نظام إدارة مواقف السيارات؟
تضمن إدارة مواقف السيارات باستخدام Ultralytics YOLO26 ركنًا فعالًا وآمنًا من خلال تنظيم المساحات ومراقبة التوفر. يمكن لـ YOLO26 تحسين إدارة مواقف السيارات من خلال اكتشاف المركبات في الوقت الفعلي، والرؤى حول إشغال مواقف السيارات.
شاهد: كيفية إنشاء نظام لإدارة مواقف السيارات باستخدام Ultralytics | الكشف الفوري عن المواقع 🚗
مزايا نظام إدارة مواقف السيارات
- الكفاءة: تعمل إدارة مواقف السيارات على تحسين استخدام أماكن وقوف السيارات وتقليل الازدحام.
- السلامة والأمن: تعمل إدارة مواقف السيارات باستخدام YOLO26 على تحسين سلامة الأشخاص والمركبات من خلال تدابير المراقبة والأمن.
- انبعاثات منخفضة: تعمل إدارة مواقف السيارات باستخدام YOLO26 على إدارة تدفق حركة المرور لتقليل وقت التوقف والانبعاثات في مواقف السيارات.
تطبيقات العالم الحقيقي
| نظام إدارة مواقف السيارات | نظام إدارة مواقف السيارات |
|---|---|
 |  |
| إدارة مواقف السيارات من منظور جوي باستخدام Ultralytics YOLO26 | إدارة مواقف السيارات من منظور علوي باستخدام Ultralytics YOLO26 |
سير عمل كود نظام إدارة مواقف السيارات
أصبح تحديد النقاط الآن سهلاً
يعد اختيار نقاط وقوف السيارات مهمة بالغة الأهمية ومعقدة في أنظمة إدارة مواقف السيارات. تعمل Ultralytics على تبسيط هذه العملية من خلال توفير أداة "Parking slots annotator" التي تتيح لك تحديد مناطق مواقف السيارات، والتي يمكن استخدامها لاحقًا للمعالجة الإضافية.
الخطوة الأولى: التقاط إطار من الفيديو أو بث الكاميرا حيث تريد إدارة موقف السيارات.
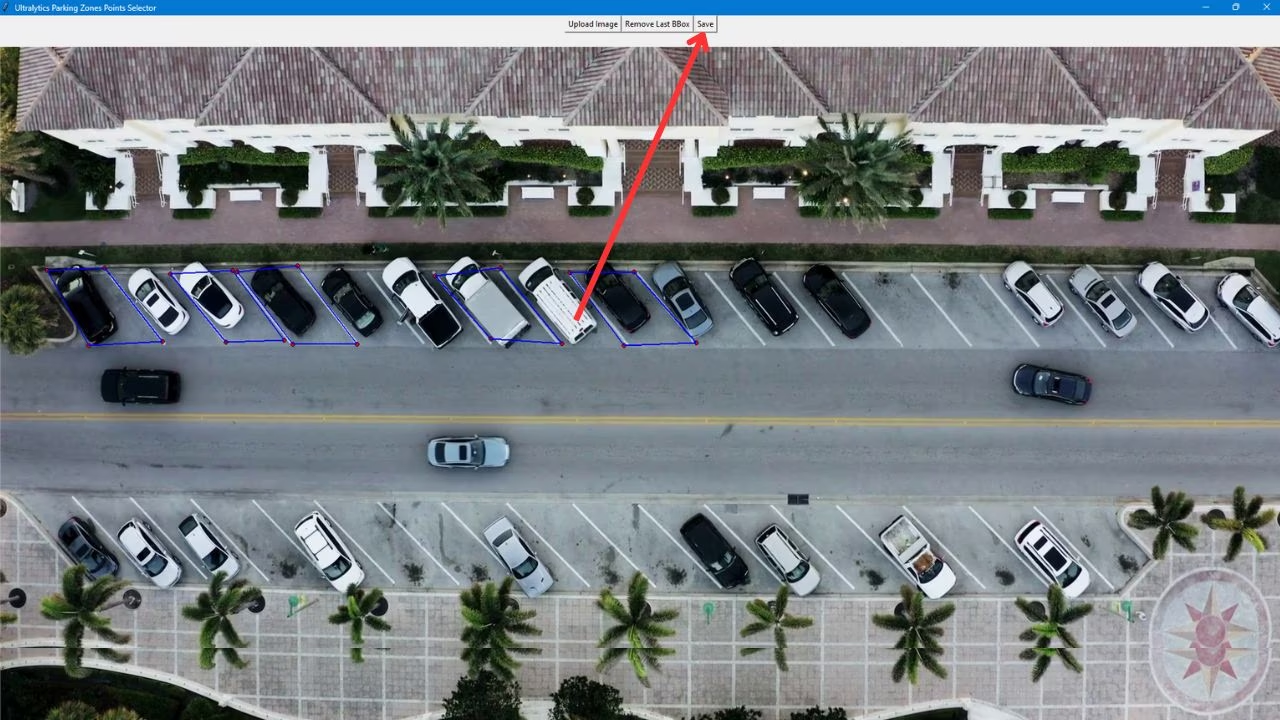
الخطوة الثانية: استخدم الكود المتوفر لتشغيل واجهة رسومية، حيث يمكنك تحديد صورة والبدء في تحديد مناطق وقوف السيارات بالنقر بالماوس لإنشاء مضلعات.
أداة تعليم مواقف السيارات Ultralytics YOLO
خطوة إضافية للتثبيت tkinter
عمومًا، tkinter يأتي مُغلَّفًا مسبقًا مع Python. ومع ذلك، إذا لم يكن كذلك، يمكنك تثبيته باستخدام الخطوات الموضحة:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - فيدورا:
sudo dnf install python3-tkinter - البنية:
sudo pacman -S tk - Windows: أعد تثبيت Python وقم بتمكين خانة الاختيار
tcl/tk and IDLEعلى ميزات اختيارية أثناء التثبيت - MacOS: أعد تثبيت Python من https://www.python.org/downloads/macos/ أو
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
الخطوة 3: بعد تحديد مناطق وقوف السيارات بالمضلعات، انقر فوق save لتخزين ملف JSON بالبيانات في دليل العمل الخاص بك.
الخطوة الرابعة: يمكنك الآن استخدام الكود المتوفر لإدارة مواقف السيارات باستخدام Ultralytics YOLO.
إدارة مواقف السيارات باستخدام Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
ملاحظة
قم أولاً بإنشاء تعليقات توضيحية لمنطقة وقوف السيارات باستخدام ParkingPtsSelection() في Python الخطوة 2 أعلاه)، ثم قم بتمرير ملف JSON إلى CLI .
ParkingManagement الوسائط
إليك جدول مع ParkingManagement arguments:
| الوسيطة | النوع | افتراضي | الوصف |
|---|---|---|---|
model | str | None | مسار إلى ملف نموذج Ultralytics YOLO. |
json_file | str | None | مسار ملف JSON الذي يحتوي على جميع بيانات إحداثيات مواقف السيارات. |
في ParkingManagement يسمح الحل باستخدام العديد من track المعلمات:
| الوسيطة | النوع | افتراضي | الوصف |
|---|---|---|---|
tracker | str | 'botsort.yaml' | يحدد خوارزمية التتبع المراد استخدامها، على سبيل المثال، bytetrack.yaml أو botsort.yaml. |
conf | float | 0.1 | يحدد عتبة الثقة للكشف؛ القيم الأقل تسمح بتتبع المزيد من الكائنات ولكن قد تتضمن نتائج إيجابية كاذبة. |
iou | float | 0.7 | يحدد عتبة التقاطع على الاتحاد (IoU) لتصفية عمليات الكشف المتداخلة. |
classes | list | None | يقوم بتصفية النتائج حسب فهرس الفئة. على سبيل المثال، classes=[0, 2, 3] يتتبع الفئات المحددة فقط. |
verbose | bool | True | يتحكم في عرض نتائج التتبع، مما يوفر مخرجًا مرئيًا للكائنات التي يتم تتبعها. |
device | str | None | يحدد الجهاز الخاص بالاستدلال (على سبيل المثال، cpu, cuda:0 أو 0). يسمح للمستخدمين بالاختيار بين CPU أو GPU معين أو أجهزة حساب أخرى لتنفيذ النموذج. |
علاوة على ذلك، يتم دعم خيارات التصور التالية:
| الوسيطة | النوع | افتراضي | الوصف |
|---|---|---|---|
show | bool | False | إذا True، يعرض الصور أو مقاطع الفيديو المشروحة في نافذة. مفيد للحصول على تعليقات مرئية فورية أثناء التطوير أو الاختبار. |
line_width | int or None | None | يحدد عرض خطوط مربعات الإحاطة. إذا None، يتم تعديل عرض الخط تلقائيًا بناءً على حجم الصورة. يوفر تخصيصًا مرئيًا للوضوح. |
الأسئلة الشائعة
كيف يعزز Ultralytics YOLO26 أنظمة إدارة مواقف السيارات؟
يعزز Ultralytics YOLO26 بشكل كبير أنظمة إدارة مواقف السيارات من خلال توفير الكشف عن المركبات ومراقبتها في الوقت الفعلي. يؤدي هذا إلى الاستخدام الأمثل لأماكن ركن السيارات، وتقليل الازدحام، وتحسين السلامة من خلال المراقبة المستمرة. يتيح نظام إدارة مواقف السيارات تدفقًا فعالًا لحركة المرور، مما يقلل من أوقات التوقف والانبعاثات في مواقف السيارات، وبالتالي يساهم في الاستدامة البيئية. لمزيد من التفاصيل، يرجى الرجوع إلى سير عمل كود إدارة مواقف السيارات.
ما هي فوائد استخدام Ultralytics YOLO26 لمواقف السيارات الذكية؟
يؤدي استخدام Ultralytics YOLO26 لمواقف السيارات الذكية إلى العديد من الفوائد:
- الكفاءة: يعمل على تحسين استخدام أماكن وقوف السيارات ويقلل من الازدحام.
- السلامة والأمن: يعزز المراقبة ويضمن سلامة المركبات والمشاة.
- التأثير البيئي: يساعد على تقليل الانبعاثات عن طريق تقليل أوقات تباطؤ المركبات. استكشف المزيد من الفوائد في قسم مزايا نظام إدارة مواقف السيارات.
كيف يمكنني تحديد أماكن ركن السيارات باستخدام Ultralytics YOLO26؟
تحديد أماكن ركن السيارات أمر بسيط باستخدام Ultralytics YOLO26:
- التقاط إطار من فيديو أو بث كاميرا.
- استخدم الكود المتوفر لتشغيل واجهة مستخدم رسومية GUI لتحديد صورة ورسم مضلعات لتحديد أماكن وقوف السيارات.
- احفظ البيانات المصنفة بتنسيق JSON لمزيد من المعالجة. للحصول على إرشادات شاملة، تحقق من قسم تحديد النقاط أعلاه.
هل يمكنني تخصيص نموذج YOLO26 لتلبية احتياجات إدارة مواقف السيارات المحددة؟
نعم، يتيح Ultralytics YOLO26 التخصيص لتلبية احتياجات إدارة مواقف السيارات المحددة. يمكنك تعديل معلمات مثل الـ ألوان المنطقة المشغولة والمتاحة، هوامش عرض النص، وأكثر من ذلك بكثير. باستخدام. ParkingManagement الخاص بـ class الوسائط، يمكنك تصميم النموذج ليناسب متطلباتك الخاصة، مما يضمن أقصى قدر من الكفاءة والفعالية.
ما هي بعض التطبيقات الواقعية لـ Ultralytics YOLO26 في إدارة مواقف السيارات؟
يُستخدم Ultralytics YOLO26 في تطبيقات واقعية مختلفة لإدارة مواقف السيارات، بما في ذلك:
- اكتشاف أماكن وقوف السيارات: تحديد المساحات المتاحة والمشغولة بدقة.
- المراقبة: تعزيز الأمن من خلال المراقبة في الوقت الفعلي.
- إدارة تدفق حركة المرور: تقليل أوقات الخمول والازدحام من خلال معالجة حركة المرور بكفاءة. يمكن العثور على صور تعرض هذه التطبيقات في تطبيقات العالم الحقيقي.






