Link to this sectionJeu de données KITTI#
![]()
Le jeu de données Ultralytics KITTI est un jeu de données de détection d'objets 2D pour la conduite autonome, contenant 7 481 images annotées (5 985 pour l'entraînement et 1 496 pour la validation) réparties en 8 classes : car, van, truck, pedestrian, person_sitting, cyclist, tram et misc. Publié par le Karlsruhe Institute of Technology et le Toyota Technological Institute at Chicago, ses images proviennent de scènes de conduite réelles en milieu urbain, rural et sur autoroute.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
La plus large KITTI Vision Benchmark Suite couvre également l'estimation de profondeur, le flux optique, la vision stéréo et l'odométrie visuelle, mais la configuration Ultralytics kitti.yaml ici est conçue pour la détection d'objets 2D et est entièrement compatible avec Ultralytics YOLO26.
Link to this sectionStructure du jeu de données#
Le jeu de test original KITTI est exclu ici car il ne possède pas d'annotations de vérité terrain publiques.
Le jeu de données contient 7 481 images annotées couvrant des objets tels que des voitures, des piétons et des cyclistes, divisées en deux sous-ensembles prédéfinis par la configuration kitti.yaml :
| Split | Images | Description |
|---|---|---|
| Entraîner (Train) | 5 985 | Images étiquetées pour l'entraînement du modèle |
| Validation | 1 496 | Images mises de côté pour l'évaluation et l'étalonnage |
Link to this sectionClasses d'objets#
Le fichier kitti.yaml définit 8 classes d'objets couvrant les véhicules, les personnes et les autres usagers de la route couramment observés dans les scènes de conduite :
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionApplications#
Le jeu de données KITTI prend en charge une gamme d'applications de détection 2D dans la conduite autonome et la robotique :
- Perception des véhicules autonomes : Entraîne des modèles à détecter et suivre des voitures, des piétons et des cyclistes afin que les systèmes de conduite autonome puissent naviguer en toute sécurité.
- Développement ADAS : Construis des fonctionnalités d'aide à la conduite telles que l'avertissement de collision et la détection de piétons sur des images de conduite réelles.
- Analyse du trafic et des scènes routières : Détecte et compte les véhicules et les usagers de la route pour étudier le flux de circulation et la sécurité routière.
- Étalonnage en vision par ordinateur : Utilise KITTI comme étalon de référence pour évaluer les modèles de détection d'objets et de suivi 2D.
Pour étiqueter tes propres images de conduite, entraîner et gérer les versions de tes jeux de données dans ton navigateur, exécute le flux de travail complet avec Ultralytics Platform.
Link to this sectionYAML du jeu de données#
Ultralytics définit la configuration du jeu de données KITTI à l'aide d'un fichier YAML. Ce fichier précise les chemins du jeu de données, les étiquettes de classe et les métadonnées requises pour l'entraînement. Le fichier de configuration est disponible sur https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionUtilisation#
Pour entraîner un modèle YOLO26n sur le jeu de données KITTI pendant 100 epochs avec une taille d'image de 640, utilise les commandes suivantes. Le jeu de données (390,5 Mo) se télécharge automatiquement lors de la première utilisation. Pour plus de détails, réfère-toi à la page Entraînement.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Tu peux également effectuer des tâches d'évaluation, d'inférence et d'exportation directement depuis la ligne de commande ou l'API Python en utilisant le même fichier de configuration.
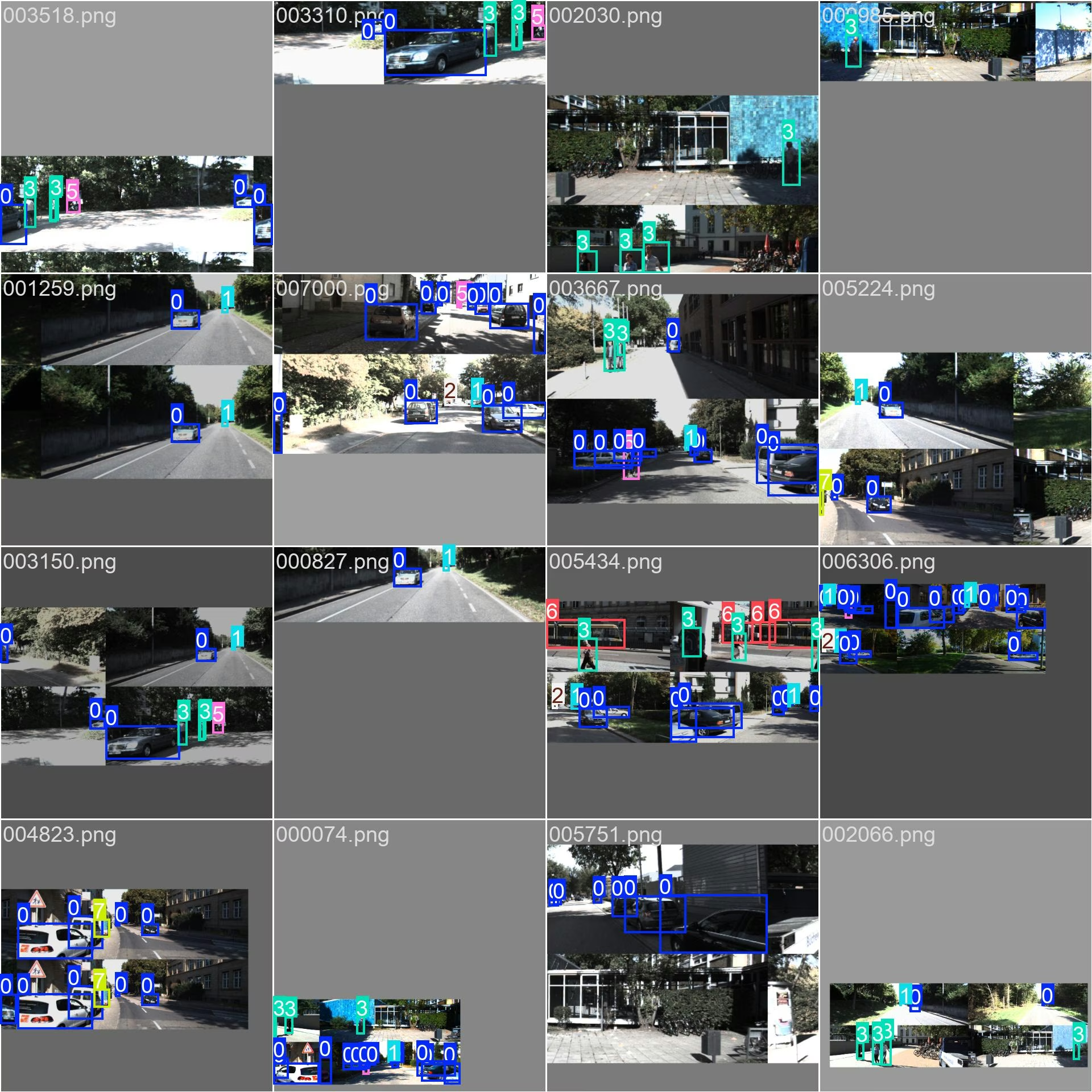
Link to this sectionExemples d'images et annotations#
L'exemple ci-dessous montre une scène de conduite du jeu de données avec ses annotations de boîtes englobantes 2D. Les images KITTI couvrent des scènes urbaines, rurales et autoroutières capturées dans un trafic réel, offrant aux modèles des échelles d'objets, des points de vue et des éclairages variés.
Link to this sectionCitations et remerciements#
Si tu utilises le jeu de données KITTI dans tes recherches, merci de citer l'article suivant :
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Nous remercions la KITTI Vision Benchmark Suite de fournir ce jeu de données complet qui continue de façonner les progrès en vision par ordinateur, robotique et systèmes autonomes. Visite le site web KITTI pour plus d'informations.
Link to this sectionFAQ#
Link to this sectionÀ quoi sert le jeu de données KITTI ?#
Le jeu de données Ultralytics KITTI est utilisé pour entraîner et évaluer des modèles de détection d'objets 2D pour la conduite autonome. Il fournit 7 481 images annotées réparties en 8 classes, dont des voitures, des piétons et des cyclistes, et est largement utilisé pour l'étalonnage de modèles de perception.
Link to this sectionCombien d'images et de classes contient le jeu de données KITTI ?#
La configuration Ultralytics KITTI contient 7 481 images — 5 985 pour l'entraînement et 1 496 pour la validation — sans séparation de test distincte. Chaque image est annotée selon 8 classes : car, van, truck, pedestrian, person_sitting, cyclist, tram et misc.
Link to this sectionLe jeu de données KITTI inclut-il une séparation de test ?#
Non. La configuration Ultralytics KITTI ne fournit que des séparations d'entraînement (5 985 images) et de validation (1 496 images). Le jeu de test original KITTI est exclu car il ne possède pas d'annotations de vérité terrain publiques.
Link to this sectionComment télécharger le jeu de données KITTI ?#
Le jeu de données (390,5 Mo) se télécharge automatiquement la première fois que tu lances un entraînement avec data="kitti.yaml" — aucune étape manuelle n'est nécessaire. Ultralytics récupère les images et les étiquettes et les décompresse dans ton répertoire local de jeux de données. Tu peux parcourir les jeux de données associés dans l'aperçu des jeux de données de détection.
Link to this sectionPuis-je entraîner des modèles Ultralytics YOLO26 en utilisant le jeu de données KITTI ?#
Oui, KITTI est entièrement compatible avec Ultralytics YOLO26. Tu peux entraîner et valider des modèles directement en utilisant le fichier de configuration YAML fourni.
Link to this sectionOù puis-je trouver le fichier de configuration du jeu de données KITTI ?#
Tu peux accéder au fichier kitti.yaml sur https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml. Il définit les chemins du jeu de données et les 8 noms de classes utilisés pour l'entraînement.