Link to this sectionStima della velocità con Ultralytics YOLO26 🚀#
Link to this sectionCos'è la stima della velocità?#
La stima della velocità è il processo di calcolo della velocità di movimento di un oggetto all'interno di un determinato contesto, spesso impiegato nelle applicazioni di computer vision. Utilizzando Ultralytics YOLO26, ora puoi calcolare la velocità degli oggetti tramite il tracciamento degli oggetti insieme ai dati di distanza e tempo, essenziali per attività come il monitoraggio del traffico e la sorveglianza. L'accuratezza della stima della velocità influenza direttamente l'efficienza e l'affidabilità di varie applicazioni, rendendola una componente chiave nel progresso dei sistemi intelligenti e dei processi decisionali in tempo reale.
Watch: Speed Estimation using Ultralytics YOLO26
Per approfondimenti sulla stima della velocità, dai un'occhiata al nostro post sul blog: Ultralytics YOLO per la stima della velocità nei progetti di Computer Vision
Link to this sectionVantaggi della stima della velocità#
- Controllo efficiente del traffico: Un'accurata stima della velocità aiuta a gestire il flusso del traffico, migliorando la sicurezza e riducendo la congestione sulle strade.
- Navigazione autonoma precisa: Nei sistemi autonomi come le self-driving cars, una stima affidabile della velocità garantisce una navigazione del veicolo sicura e precisa.
- Maggiore sicurezza nella sorveglianza: La stima della velocità nell'analisi di sorveglianza aiuta a identificare comportamenti insoliti o potenziali minacce, migliorando l'efficacia delle misure di sicurezza.
Link to this sectionApplicazioni nel mondo reale#
| Trasporti | Trasporti |
|---|---|
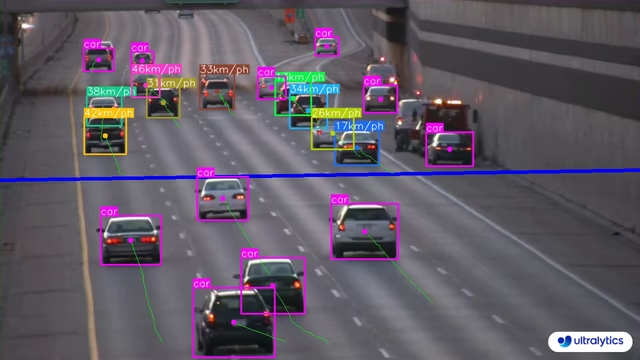 | 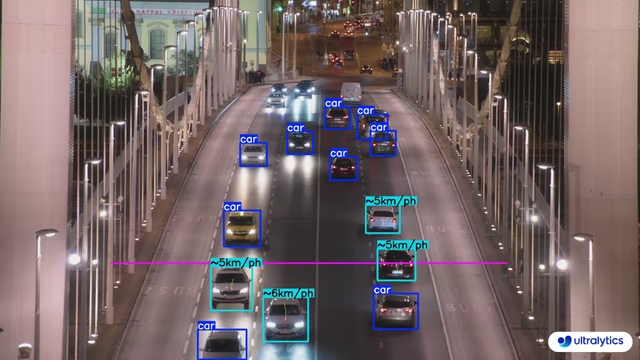 |
| Stima della velocità su strada utilizzando Ultralytics YOLO26 | Stima della velocità su ponte utilizzando Ultralytics YOLO26 |
La velocità è una stima
La velocità sarà una stima e potrebbe non essere completamente accurata. Inoltre, la stima può variare in base alle specifiche della fotocamera e a fattori correlati.
Link to this sectionStima la velocità con YOLO26#
La soluzione SpeedEstimator traccia ogni oggetto tra i frame e converte il suo spostamento in pixel in una velocità utilizzando la frequenza dei fotogrammi video (fps) e una scala nel mondo reale (meter_per_pixel). Regola meter_per_pixel in base alla configurazione della tua fotocamera e usa max_speed per limitare i valori anomali causati da tracce rumorose.
# Run a speed example
yolo solutions speed show=True
# Pass a source video
yolo solutions speed source="path/to/video.mp4"
# Adjust meter per pixel value based on camera configuration
yolo solutions speed meter_per_pixel=0.05Link to this sectionArgomenti di SpeedEstimator#
Ecco una tabella con gli argomenti di SpeedEstimator:
| Argomento | Tipo | Predefinito | Descrizione |
|---|---|---|---|
model | str | None | Percorso verso un file del modello Ultralytics YOLO. |
fps | float | 30.0 | Fotogrammi al secondo utilizzati per i calcoli della velocità. |
max_hist | int | 5 | Punti storici massimi da tracciare per oggetto per i calcoli di velocità/direzione. |
meter_per_pixel | float | 0.05 | Fattore di scala utilizzato per convertire la distanza in pixel in unità del mondo reale. |
max_speed | int | 120 | Limite di velocità massima nelle sovrapposizioni visive (utilizzato negli avvisi). |
La soluzione SpeedEstimator consente l'uso dei parametri di track:
| Argomento | Tipo | Predefinito | Descrizione |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Specifica l'algoritmo di tracciamento da utilizzare. Opzioni integrate: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Imposta la soglia di confidenza per i rilevamenti; valori più bassi consentono di tracciare più oggetti ma possono includere falsi positivi. |
iou | float | 0.7 | Imposta la soglia di Intersection over Union (IoU) per filtrare i rilevamenti sovrapposti. |
classes | list | None | Filtra i risultati per indice di classe. Ad esempio, classes=[0, 2, 3] traccia solo le classi specificate. |
verbose | bool | True | Controlla la visualizzazione dei risultati di tracciamento, fornendo un output visivo degli oggetti tracciati. |
device | str | None | Specifica il dispositivo per l'inferenza (ad esempio, cpu, cuda:0 o 0). Consente agli utenti di scegliere tra CPU, una GPU specifica o altri dispositivi di calcolo per l'esecuzione del modello. |
Inoltre, sono supportate le seguenti opzioni di visualizzazione:
| Argomento | Tipo | Predefinito | Descrizione |
|---|---|---|---|
show | bool | False | Se True, visualizza le immagini o i video annotati in una finestra. Utile per un feedback visivo immediato durante lo sviluppo o il test. |
line_width | int or None | None | Specifica la larghezza della linea dei bounding box. Se None, la larghezza della linea viene regolata automaticamente in base alla dimensione dell'immagine. Fornisce personalizzazione visiva per chiarezza. |
show_conf | bool | True | Mostra il punteggio di confidenza per ogni rilevamento accanto all'etichetta. Fornisce informazioni sulla certezza del modello per ogni rilevamento. |
show_labels | bool | True | Mostra le etichette per ogni rilevamento nell'output visivo. Offre una comprensione immediata degli oggetti rilevati. |
Link to this sectionFAQ#
Link to this sectionCome stimo la velocità di un oggetto utilizzando Ultralytics YOLO26?#
La stima della velocità degli oggetti con Ultralytics YOLO26 combina object detection e tracking. Il modello rileva gli oggetti in ogni fotogramma, li traccia tra i vari frame e converte la distanza percorsa tra i fotogrammi in una velocità utilizzando la frequenza dei fotogrammi e la scala meter_per_pixel. L'esempio Python qui sopra esegue l'intera pipeline: passa il tuo video e regola meter_per_pixel per la tua fotocamera. Per ulteriori informazioni, consulta il nostro post sul blog ufficiale.
Link to this sectionQuali sono i vantaggi dell'utilizzo di Ultralytics YOLO26 per la stima della velocità nella gestione del traffico?#
Utilizzare Ultralytics YOLO26 per la stima della velocità offre vantaggi significativi nella gestione del traffico:
- Maggiore sicurezza: Stima accuratamente la velocità dei veicoli per rilevare gli eccessi di velocità e migliorare la sicurezza stradale.
- Monitoraggio in tempo reale: Beneficia della capacità di rilevamento degli oggetti in tempo reale di YOLO26 per monitorare efficacemente il flusso del traffico e la congestione.
- Scalabilità: Distribuisci il modello su diverse configurazioni hardware, dai dispositivi edge ai server, garantendo soluzioni flessibili e scalabili per implementazioni su larga scala.
Per ulteriori applicazioni, consulta i vantaggi della stima della velocità.
Link to this sectionYOLO26 può essere integrato con altri framework IA come TensorFlow o PyTorch?#
Sì, YOLO26 può essere integrato con altri framework IA come TensorFlow e PyTorch. Ultralytics fornisce supporto per l'esportazione dei modelli YOLO26 in vari formati come ONNX, TensorRT e CoreML, garantendo un'interoperabilità fluida con altri framework di machine learning.
Per esportare un modello YOLO26 in formato ONNX:
yolo export model=yolo26n.pt format=onnxScopri di più sull'esportazione dei modelli nella nostra guida sull'esportazione.
Link to this sectionQuanto è accurata la stima della velocità utilizzando Ultralytics YOLO26?#
L'accuratezza della stima della velocità utilizzando Ultralytics YOLO26 dipende da diversi fattori, tra cui la qualità del tracciamento degli oggetti, la risoluzione e il frame rate del video, e variabili ambientali. Sebbene lo stimatore di velocità fornisca stime affidabili, potrebbe non essere accurato al 100% a causa delle varianze nella velocità di elaborazione dei fotogrammi e dell'occlusione degli oggetti.
Nota: Considera sempre il margine di errore e convalida le stime con i dati di ground truth quando possibile.
Per ulteriori suggerimenti sul miglioramento dell'accuratezza, controlla la sezione Argomenti di SpeedEstimator.