Link to this sectionUltralytics YOLO를 사용한 데이터 증강#
Link to this section소개#
데이터 증강은 컴퓨터 비전에서 기존 이미지에 다양한 변환을 적용하여 학습 데이터셋을 인위적으로 확장하는 중요한 기술입니다. Ultralytics YOLO와 같은 딥러닝 모델을 학습할 때, 데이터 증강은 모델의 견고성을 개선하고 과적합을 줄이며 실제 환경에 대한 일반화 성능을 향상시키는 데 도움을 줍니다.
Watch: How to use Mosaic, MixUp & more Data Augmentations to help Ultralytics YOLO Models generalize better 🚀
Link to this section데이터 증강이 중요한 이유#
데이터 증강은 컴퓨터 비전 모델 학습에 있어 여러 가지 중요한 목적을 수행합니다:
- 확장된 데이터셋: 기존 이미지의 변형을 생성함으로써 새로운 데이터를 수집하지 않고도 학습 데이터셋 크기를 효과적으로 늘릴 수 있습니다.
- 일반화 성능 향상: 모델이 다양한 조건에서 객체를 인식하는 방법을 학습하여 실제 애플리케이션에서 더 견고해집니다.
- 과적합 감소: 학습 데이터에 가변성을 도입함으로써 모델이 특정 이미지의 특징을 암기할 가능성을 줄여줍니다.
- 성능 강화: 적절한 증강을 사용하여 학습된 모델은 일반적으로 검증 및 테스트 세트에서 더 나은 정확도를 달성합니다.
Ultralytics YOLO의 구현은 다양한 증강 기술을 포괄적으로 제공하며, 각 기술은 특정 목적을 수행하고 모델 성능에 서로 다른 방식으로 기여합니다. 이 가이드에서는 각 증강 파라미터를 자세히 살펴보고, 프로젝트에서 언제 어떻게 효과적으로 사용할 수 있는지 이해하도록 돕습니다.
Link to this section구성 예시#
Python API, 커맨드 라인 인터페이스(CLI) 또는 설정 파일을 사용하여 각 파라미터를 사용자 정의할 수 있습니다. 아래는 각 방법에서 데이터 증강을 설정하는 방법의 예시입니다.
import albumentations as A
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n.pt")
# Training with custom augmentation parameters
model.train(data="coco.yaml", epochs=100, hsv_h=0.03, hsv_s=0.6, hsv_v=0.5)
# Training without any augmentations (disabled values omitted for clarity)
model.train(
data="coco.yaml",
epochs=100,
hsv_h=0.0,
hsv_s=0.0,
hsv_v=0.0,
translate=0.0,
scale=0.0,
fliplr=0.0,
mosaic=0.0,
erasing=0.0,
auto_augment=None,
)
# Training with custom Albumentations transforms (Python API only)
custom_transforms = [
A.Blur(blur_limit=7, p=0.5),
A.CLAHE(clip_limit=4.0, p=0.5),
]
model.train(data="coco.yaml", epochs=100, augmentations=custom_transforms)Link to this section설정 파일 사용하기#
You can define all training parameters, including augmentations, in a YAML configuration file (e.g., train_custom.yaml). The mode parameter is only required when using the CLI. This new YAML file will then override the default one located in the ultralytics package.
# train_custom.yaml
# 'mode' is required only for CLI usage
mode: train
data: coco8.yaml
model: yolo26n.pt
epochs: 100
hsv_h: 0.03
hsv_s: 0.6
hsv_v: 0.5그런 다음 Python API로 학습을 시작합니다:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Train the model with custom configuration
model.train(cfg="train_custom.yaml")Link to this section색 공간 증강#
Link to this section색상 조정 (hsv_h)#
- 범위:
0.0-1.0 - 기본값:
0.015 - 사용법: 색상 관계를 유지하면서 이미지 색상을 이동시킵니다.
hsv_h하이퍼파라미터는 이동 크기를 정의하며, 최종 조정값은-hsv_h와hsv_h사이에서 무작위로 선택됩니다. 예를 들어hsv_h=0.3인 경우, 이동값은-0.3에서0.3사이에서 무작위로 선택됩니다.0.5보다 큰 값의 경우 색상 휠을 따라 색상 이동이 순환되므로,0.5와-0.5사이의 증강 결과는 동일하게 보입니다. - 목적: 조명 조건이 객체의 외형에 큰 영향을 미칠 수 있는 실외 시나리오에서 특히 유용합니다. 예를 들어, 바나나는 밝은 햇빛 아래에서는 더 노랗게 보일 수 있지만 실내에서는 더 녹색으로 보일 수 있습니다.
- Ultralytics 구현: RandomHSV
-0.5 | -0.25 | 0.0 | 0.25 | 0.5 |
|---|---|---|---|---|
 |  |  |  |  |
Link to this section채도 조정 (hsv_s)#
- 범위:
0.0-1.0 - 기본값:
0.7 - 사용법: 이미지의 색상 강도를 수정합니다.
hsv_s하이퍼파라미터는 이동 크기를 정의하며, 최종 조정값은-hsv_s와hsv_s사이에서 무작위로 선택됩니다. 예를 들어hsv_s=0.7인 경우, 강도는-0.7에서0.7사이에서 무작위로 선택됩니다. - 목적: 모델이 다양한 날씨 조건과 카메라 설정을 처리하도록 돕습니다. 예를 들어, 빨간색 교통 표지판은 맑은 날에는 매우 선명하게 보일 수 있지만 안개 낀 날씨에는 흐릿하고 퇴색되어 보일 수 있습니다.
- Ultralytics 구현: RandomHSV
-1.0 | -0.5 | 0.0 | 0.5 | 1.0 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section밝기 조정 (hsv_v)#
- 범위:
0.0-1.0 - 기본값:
0.4 - 사용법: 이미지의 밝기를 변경합니다.
hsv_v하이퍼파라미터는 이동 크기를 정의하며, 최종 조정값은-hsv_v와hsv_v사이에서 무작위로 선택됩니다. 예를 들어hsv_v=0.4인 경우, 강도는-0.4에서0.4사이에서 무작위로 선택됩니다. - 목적: 다양한 조명 조건에서 작동해야 하는 모델을 학습시키는 데 필수적입니다. 예를 들어, 빨간 사과는 햇빛 아래에서는 밝게 보일 수 있지만 그늘에서는 훨씬 어둡게 보일 수 있습니다.
- Ultralytics 구현: RandomHSV
-1.0 | -0.5 | 0.0 | 0.5 | 1.0 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section기하학적 변환#
Link to this section회전 (degrees)#
- 범위:
0.0~180 - 기본값:
0 - 사용법: 지정된 범위 내에서 이미지를 무작위로 회전합니다.
degrees하이퍼파라미터는 회전 각도를 정의하며, 최종 조정값은-degrees와degrees사이에서 무작위로 선택됩니다. 예를 들어degrees=10.0인 경우, 회전값은-10.0에서10.0사이에서 무작위로 선택됩니다. - 목적: 객체가 다양한 방향으로 나타날 수 있는 애플리케이션에 필수적입니다. 예를 들어, 항공 드론 이미지에서 차량은 어떤 방향으로든 배치될 수 있으므로, 모델은 회전과 관계없이 객체를 인식해야 합니다.
- Ultralytics 구현: RandomPerspective
-180 | -90 | 0.0 | 90 | 180 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section이동 (translate)#
- 범위:
0.0-1.0 - 기본값:
0.1 - 사용법: 이미지 크기의 무작위 비율만큼 이미지를 수평 및 수직으로 이동시킵니다.
translate하이퍼파라미터는 이동 크기를 정의하며, 최종 조정값은-translate와translate범위 내에서 두 번(각 축마다 한 번씩) 무작위로 선택됩니다. 예를 들어translate=0.5인 경우, x축에 대해-0.5에서0.5사이에서 이동값이 무작위로 선택되고, y축에 대해서도 같은 범위 내에서 별도의 독립적인 무작위 값이 선택됩니다. - 목적: 부분적으로 보이는 객체를 모델이 탐지하도록 돕고 객체 위치에 대한 견고성을 향상시킵니다. 예를 들어, 차량 손상 평가 애플리케이션에서 자동차 부품은 촬영자의 위치와 거리에 따라 프레임에 완전히 나타나거나 부분적으로 나타날 수 있습니다. 이동 증강은 모델이 객체의 완전성이나 위치와 관계없이 이러한 특징을 인식하도록 가르칩니다.
- Ultralytics 구현: RandomPerspective
- 참고: 단순화를 위해 아래 적용된 이동은
x및y축 모두에 대해 매번 동일합니다.-1.0및1.0값은 이미지를 프레임 밖으로 완전히 이동시키므로 표시되지 않습니다.
-0.5 | -0.25 | 0.0 | 0.25 | 0.5 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section스케일 (scale)#
- 범위:
0.0-1.0 - 기본값:
0.5 - 사용법: 지정된 범위 내에서 무작위 요소를 사용하여 이미지 크기를 조정합니다.
scale하이퍼파라미터는 스케일링 요소를 정의하며, 최종 조정값은1-scale과1+scale사이에서 무작위로 선택됩니다. 예를 들어scale=0.5인 경우, 스케일링은0.5에서1.5사이에서 무작위로 선택됩니다. - 목적: 모델이 다양한 거리와 크기의 객체를 처리할 수 있게 합니다. 예를 들어, 자율 주행 애플리케이션에서 차량은 카메라로부터 다양한 거리에 나타날 수 있으며, 모델은 크기와 관계없이 이를 인식해야 합니다.
- Ultralytics 구현: RandomPerspective
- 참고:
-1.0값은 이미지를 사라지게 하므로 표시되지 않으며,1.0은 단순히 2배 줌 결과를 낳습니다.- 아래 표에 표시된 값은 최종 스케일링 요소가 아니라 하이퍼파라미터
scale을 통해 적용된 값입니다. scale이1.0보다 크면 스케일링 요소가1-scale과1+scale사이에서 무작위로 선택되므로 이미지가 매우 작아지거나 뒤집힐 수 있습니다. 예를 들어scale=3.0인 경우, 스케일링은-2.0에서4.0사이에서 무작위로 선택됩니다. 음수 값이 선택되면 이미지가 뒤집힙니다.
-0.5 | -0.25 | 0.0 | 0.25 | 0.5 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section전단 변환 (shear)#
- 범위:
-180~+180 - 기본값:
0 - 사용법: 이미지의 일부를 한 방향으로 이동하면서 평행선을 유지하는 동시에 x축 및 y축을 따라 이미지를 비트는 기하학적 변환을 도입합니다.
shear하이퍼파라미터는 전단 각도를 정의하며, 최종 조정값은-shear와shear사이에서 무작위로 선택됩니다. 예를 들어shear=10.0인 경우, x축에 대해-10에서10사이에서 전단값이 무작위로 선택되고, y축에 대해서도 같은 범위 내에서 별도의 독립적인 무작위 값이 선택됩니다. - 목적: 모델이 약간의 기울어짐이나 비스듬한 시점으로 인해 발생하는 보기 각도의 변화를 일반화하도록 돕습니다. 예를 들어, 교통 모니터링에서 자동차나 도로 표지판과 같은 객체는 카메라 배치가 수직이 아닐 경우 비스듬하게 보일 수 있습니다. 전단 증강을 적용하면 모델이 이러한 비틀린 왜곡에도 불구하고 객체를 인식하도록 학습할 수 있습니다.
- Ultralytics 구현: RandomPerspective
- 참고:
shear값은 이미지를 급격히 왜곡시킬 수 있으므로 작은 값으로 시작하여 점차 늘려가는 것이 좋습니다.- 원근 변환과 달리, 전단은 깊이나 소실점을 도입하지 않고 대신 반대편을 평행하게 유지하면서 객체의 각도를 변경하여 형태를 왜곡합니다.
-10 | -5 | 0.0 | 5 | 10 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section원근감(perspective)#
- 범위:
0.0-0.001 - 기본값:
0 - 사용법: x축 및 y축을 따라 완전한 원근 변환을 적용하여, 서로 다른 깊이나 각도에서 볼 때 객체가 어떻게 보이는지를 시뮬레이션합니다.
perspective하이퍼파라미터는 원근감의 강도를 정의하며, 최종 조정값은-perspective와perspective사이에서 무작위로 선택됩니다. 예를 들어perspective=0.001인 경우, 원근감은 x축에서-0.001에서0.001사이의 값으로 무작위 선택되며, y축에서도 동일한 범위 내에서 별도의 독립적인 무작위 값이 선택됩니다. - 목적: 원근감 증강(augmentation)은 극단적인 시점 변화를 처리하는 데 중요하며, 특히 원근 이동으로 인해 객체가 단축되거나 왜곡되어 보이는 상황에서 유용합니다. 예를 들어 드론 기반 객체 탐지에서 건물, 도로, 차량은 드론의 기울기와 고도에 따라 늘어나거나 압축되어 보일 수 있습니다. 원근 변환을 적용함으로써 모델은 이러한 원근 왜곡에도 불구하고 객체를 인식하도록 학습하여 실제 환경에서의 배포 견고성을 향상시킵니다.
- Ultralytics 구현: RandomPerspective
-0.001 | -0.0005 | 0.0 | 0.0005 | 0.001 |
|---|---|---|---|---|
 |  | |  |  |
Link to this section상하 반전(flipud)#
- 범위:
0.0-1.0 - 기본값:
0 - 사용법: 이미지를 y축을 따라 반전시켜 수직 뒤집기를 수행합니다. 이 변환은 전체 이미지를 상하로 미러링하지만 객체 간의 모든 공간적 관계는 보존합니다. flipud 하이퍼파라미터는 변환 적용 확률을 정의하며,
flipud=1.0이면 모든 이미지가 뒤집히고flipud=0.0이면 변환이 완전히 비활성화됩니다. 예를 들어flipud=0.5로 설정하면 각 이미지가 50% 확률로 상하 반전됩니다. - 목적: 객체가 거꾸로 나타날 수 있는 시나리오에서 유용합니다. 예를 들어 로봇 비전 시스템에서 컨베이어 벨트나 로봇 팔 위의 객체는 다양한 방향으로 집어 올려질 수 있습니다. 수직 반전은 모델이 상하 위치와 관계없이 객체를 인식하도록 돕습니다.
- Ultralytics 구현: RandomFlip
flipud 끄기 | flipud 켜기 |
|---|---|
|  |
Link to this section좌우 반전(fliplr)#
- 범위:
0.0-1.0 - 기본값:
0.5 - 사용법: 이미지를 x축을 기준으로 거울처럼 반전시켜 수평 뒤집기를 수행합니다. 이 변환은 공간적 일관성을 유지하면서 좌우 측면을 교체하므로, 모델이 거울 모드로 나타나는 객체에 대해서도 일반화 능력을 갖추도록 돕습니다.
fliplr하이퍼파라미터는 변환 적용 확률을 정의하며,fliplr=1.0은 모든 이미지가 반전되도록 보장하고fliplr=0.0은 변환을 완전히 비활성화합니다. 예를 들어fliplr=0.5인 경우 각 이미지는 50%의 확률로 좌우 반전됩니다. - 목적: 수평 반전은 객체 탐지, 자세 추정 및 얼굴 인식에서 좌우 변형에 대한 견고성을 향상시키기 위해 널리 사용됩니다. 예를 들어 자율 주행에서 차량과 보행자는 도로의 양쪽 어디에나 나타날 수 있으며, 수평 반전은 모델이 두 방향 모두에서 동일하게 잘 인식하도록 돕습니다.
- Ultralytics 구현: RandomFlip
fliplr 끄기 | fliplr 켜기 |
|---|---|
|  |
Link to this sectionBGR 채널 교환(bgr)#
- 범위:
0.0-1.0 - 기본값:
0 - 사용법: 이미지의 색상 채널을 RGB에서 BGR로 교환하여 색상이 표현되는 순서를 변경합니다.
bgr하이퍼파라미터는 변환 적용 확률을 정의하며,bgr=1.0은 모든 이미지가 채널 교환을 거치도록 보장하고bgr=0.0은 이를 비활성화합니다. 예를 들어bgr=0.5인 경우 각 이미지는 50%의 확률로 RGB에서 BGR로 변환됩니다. - 목적: 서로 다른 색상 채널 순서에 대한 견고성을 높입니다. 예를 들어 RGB와 BGR 형식이 일관되지 않게 사용되는 다양한 카메라 시스템 및 이미징 라이브러리에서 작동해야 하는 모델을 학습시키거나, 입력 색상 형식이 학습 데이터와 다를 수 있는 환경에 모델을 배포할 때 유용합니다.
- Ultralytics 구현: Format
bgr 끄기 | bgr 켜기 |
|---|---|
|  |
Link to this section모자이크(mosaic)#
- 범위:
0.0-1.0 - 기본값:
1 - 사용법: 4개의 학습 이미지를 하나로 결합합니다.
mosaic하이퍼파라미터는 변환 적용 확률을 정의하며,mosaic=1.0은 모든 이미지가 결합되도록 보장하고mosaic=0.0은 변환을 비활성화합니다. 예를 들어mosaic=0.5인 경우 각 이미지는 50%의 확률로 다른 3개의 이미지와 결합됩니다. - 목적: 작은 객체 탐지 및 문맥 이해도를 향상시키는 데 매우 효과적입니다. 예를 들어 동물들이 다양한 거리와 규모로 나타날 수 있는 야생 동물 보호 프로젝트에서, 모자이크 증강은 제한된 데이터로부터 인위적으로 다양한 학습 샘플을 생성하여 모델이 다른 크기, 부분적 가림(occlusion) 및 환경적 맥락 전반에서 동일한 종을 인식하도록 학습하는 데 도움을 줍니다.
- Ultralytics 구현: Mosaic
- 참고:
mosaic증강은 모델의 견고성을 높여주지만, 학습 과정을 더 어렵게 만들 수도 있습니다.mosaic증강은 학습이 완료되기 전close_mosaic에폭(epoch) 수를 설정하여 학습 종료 시점에 비활성화할 수 있습니다. 예를 들어epochs가200으로 설정되고close_mosaic가20으로 설정된 경우,mosaic증강은180에폭 이후에 비활성화됩니다.close_mosaic가0으로 설정되면 학습 과정 전체 동안mosaic증강이 활성화됩니다.- 생성된 모자이크의 중심점은 무작위 값으로 결정되며, 이미지 내부 또는 외부에 위치할 수 있습니다.
- 현재
mosaic증강 구현 방식은 데이터셋에서 무작위로 선택된 4개의 이미지를 결합합니다. 데이터셋이 작으면 동일한 이미지가 동일한 모자이크 내에서 여러 번 사용될 수 있습니다.
mosaic 끄기 | mosaic 켜기 |
|---|---|
|  |
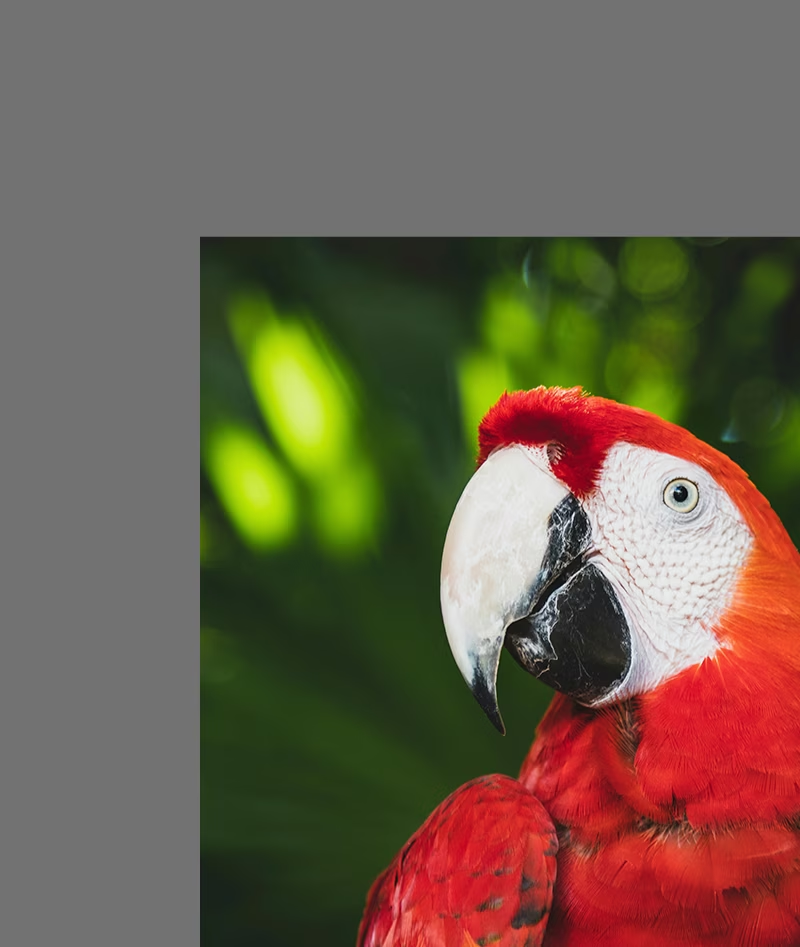
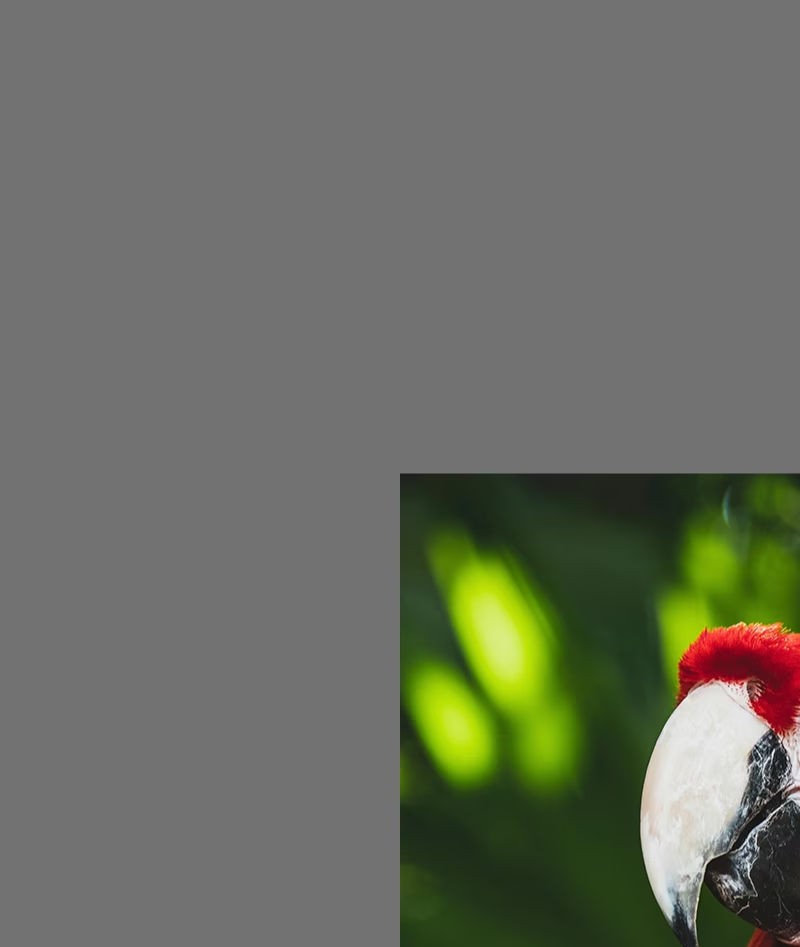
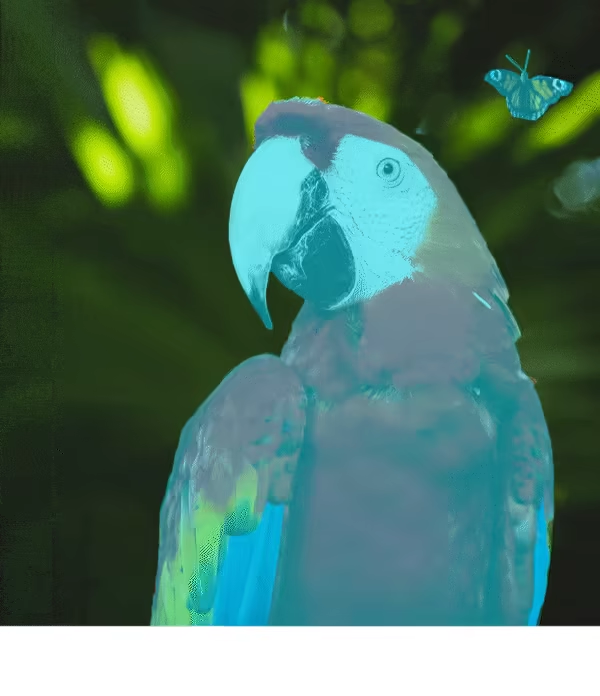
Link to this section믹스업(mixup)#
- 범위:
0.0-1.0 - 기본값:
0 - 사용법: 주어진 확률에 따라 두 이미지와 그 라벨을 혼합합니다.
mixup하이퍼파라미터는 변환 적용 확률을 정의하며,mixup=1.0은 모든 이미지가 혼합되도록 보장하고mixup=0.0은 변환을 비활성화합니다. 예를 들어mixup=0.5인 경우 각 이미지는 50%의 확률로 다른 이미지와 혼합됩니다. - 목적: 모델의 견고성을 향상시키고 과적합(overfitting)을 줄입니다. 예를 들어 소매 제품 인식 시스템에서 믹스업은 다양한 제품의 이미지를 혼합하여 모델이 더 견고한 특징을 학습하도록 돕고, 복잡한 매장 진열대에서 다른 제품에 의해 가려지거나 부분적으로만 보이는 경우에도 항목을 식별하도록 가르칩니다.
- Ultralytics 구현: Mixup
- 참고:
mixup비율은np.random.beta(32.0, 32.0)베타 분포에서 선택된 무작위 값이며, 이는 각 이미지가 약 50% 정도 기여함을 의미합니다(약간의 변동이 있음).
첫 번째 이미지, mixup 끄기 | 두 번째 이미지, mixup 끄기 | mixup 켜기 |
|---|---|---|
|  | 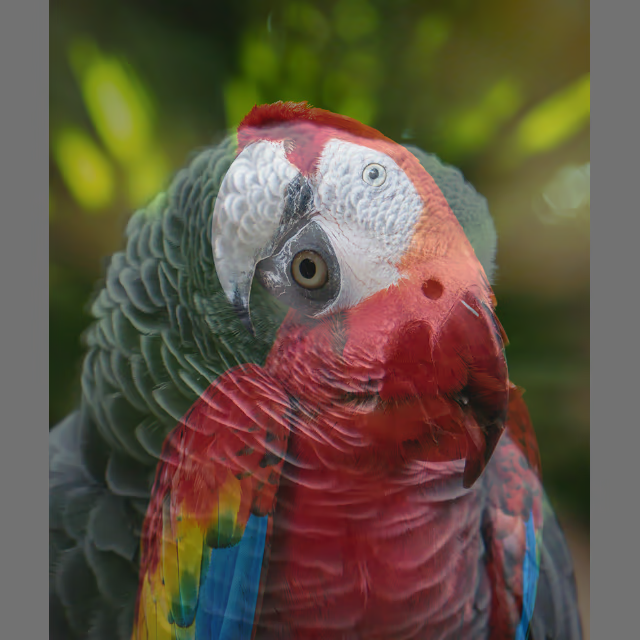 |
Link to this section컷믹스(cutmix)#
- 범위:
0.0-1.0 - 기본값:
0 - 사용법: 주어진 확률에 따라 한 이미지에서 직사각형 영역을 잘라내어 다른 이미지에 붙여넣습니다.
cutmix하이퍼파라미터는 변환 적용 확률을 정의하며,cutmix=1.0은 모든 이미지가 이 변환을 거치도록 보장하고cutmix=0.0은 완전히 비활성화합니다. 예를 들어cutmix=0.5인 경우 각 이미지는 50%의 확률로 다른 이미지의 패치로 영역이 대체됩니다. - 목적: 지역적 특징 무결성을 유지하면서 현실적인 가림 상황을 생성하여 모델 성능을 향상시킵니다. 예를 들어 자율 주행 시스템에서 컷믹스는 차량이나 보행자가 다른 객체에 의해 부분적으로 가려진 경우에도 인식하도록 모델을 학습시켜, 겹치는 객체가 있는 복잡한 실제 환경에서 탐지 정확도를 향상시킵니다.
- Ultralytics 구현: CutMix
- 참고:
- 잘라낸 영역의 크기와 위치는 적용할 때마다 무작위로 결정됩니다.
- 전역적으로 픽셀 값을 혼합하는 믹스업과 달리,
cutmix는 잘라낸 영역 내의 원래 픽셀 강도를 유지하여 지역적 특징을 보존합니다. - 영역은 기존 바운딩 박스와 겹치지 않는 경우에만 타겟 이미지에 붙여넣어집니다. 추가로 붙여넣은 영역 내에서 원래 면적의
0.1(10%) 이상을 유지하는 바운딩 박스만 보존됩니다. - 이 최소 바운딩 박스 면적 임계값은 현재 구현에서 변경할 수 없으며 기본값은
0.1로 설정되어 있습니다.
첫 번째 이미지, cutmix 끄기 | 두 번째 이미지, cutmix 끄기 | cutmix 켜기 |
|---|---|---|
 |  |  |
Link to this section세분화(Segmentation) 전용 증강#
Link to this section복사-붙여넣기(copy_paste)#
- 범위:
0.0-1.0 - 기본값:
0 - 사용법: 세분화 작업에서만 작동하며, 이 증강은
copy_paste_mode로 제어되는 지정된 확률에 따라 이미지 내 또는 이미지 간 객체를 복사합니다.copy_paste하이퍼파라미터는 변환 적용 확률을 정의하며,copy_paste=1.0은 모든 이미지가 복사되도록 보장하고copy_paste=0.0은 변환을 비활성화합니다. 예를 들어copy_paste=0.5인 경우 각 이미지는 50%의 확률로 다른 이미지의 객체를 복사하여 갖게 됩니다. - 목적: 인스턴스 세분화 작업과 희귀 객체 클래스에 특히 유용합니다. 예를 들어 특정 결함 유형이 드물게 나타나는 산업용 결함 탐지에서, 복사-붙여넣기 증강은 이 희귀 결함을 한 이미지에서 다른 이미지로 복사하여 인위적으로 발생 빈도를 높임으로써, 추가적인 결함 샘플 없이도 모델이 표현이 부족한 사례를 더 잘 학습하도록 돕습니다.
- Ultralytics 구현: CopyPaste
- 참고:
- 아래 GIF에서 볼 수 있듯이
copy_paste증강은 한 이미지에서 다른 이미지로 객체를 복사하는 데 사용할 수 있습니다. - 객체가 복사되면
copy_paste_mode와 상관없이 해당 객체의 IoA(Intersection over Area)가 소스 이미지의 모든 객체와 계산됩니다. 모든 IoA가0.3(30%) 미만이면 해당 객체는 타겟 이미지에 붙여넣어집니다. 하나라도 IoA가0.3을 초과하면 해당 객체는 타겟 이미지에 붙여넣어지지 않습니다. - IoA 임계값은 현재 구현에서 변경할 수 없으며 기본값은
0.3으로 설정되어 있습니다.
- 아래 GIF에서 볼 수 있듯이
copy_paste 끄기 | copy_paste 활성화 (copy_paste_mode=flip) | copy_paste 프로세스 시각화 |
|---|---|---|
 |  |  |
Link to this section복사-붙여넣기 모드(copy_paste_mode)#
- 옵션:
'flip','mixup' - 기본값:
'flip' - 사용법: 복사-붙여넣기 증강에 사용되는 방식을 결정합니다.
'flip'으로 설정하면 객체는 동일한 이미지에서 가져오고,'mixup'은 다른 이미지에서 객체를 복사할 수 있게 합니다. - 목적: 복사된 객체가 타겟 이미지에 통합되는 방식에 유연성을 제공합니다.
- Ultralytics 구현: CopyPaste
- 참고:
- IoA 원칙은 두
copy_paste_mode모두 동일하지만, 객체가 복사되는 방식은 다릅니다. - 이미지 크기에 따라 객체가 프레임 외부로 부분적으로 또는 완전히 복사될 수 있습니다.
- 다각형 주석(polygon annotation)의 품질에 따라 복사된 객체는 원본과 비교했을 때 미세한 모양 변화가 있을 수 있습니다.
- IoA 원칙은 두
| 참조 이미지 | copy_paste를 위해 선택된 이미지 | copy_paste 활성화 (copy_paste_mode=mixup) |
|---|---|---|
| |  |
Link to this section분류(Classification) 전용 증강#
Link to this section자동 증강(auto_augment)#
- 옵션:
'randaugment','autoaugment','augmix',None - 기본값:
'randaugment' - 사용법: 분류(classification)를 위한 자동 증강 정책을 적용합니다.
'randaugment'옵션은 RandAugment를 사용하고,'autoaugment'는 AutoAugment를,'augmix'는 AugMix를 사용합니다.None으로 설정하면 자동 증강이 비활성화됩니다. - 목적: 분류 작업에 대한 증강 전략을 자동으로 최적화합니다. 차이점은 다음과 같습니다:
- AutoAugment: 이 모드는 ImageNet, CIFAR10, SVHN과 같은 데이터셋에서 학습된 사전 정의된 증강 정책을 적용합니다. 사용자는 이러한 기존 정책을 선택할 수 있지만, Torchvision 내에서 새로운 정책을 학습시킬 수는 없습니다. 특정 데이터셋에 대한 최적의 증강 전략을 찾으려면 외부 라이브러리나 사용자 정의 구현이 필요합니다. AutoAugment 논문을 참조하십시오.
- RandAugment: 균일한 강도로 변환을 무작위 선택하여 적용합니다. 이 접근 방식은 광범위한 검색 단계의 필요성을 줄여 계산 효율성을 높이면서도 모델의 견고성을 향상시킵니다. RandAugment 논문을 참조하십시오.
- AugMix: AugMix는 단순한 변환의 무작위 조합을 통해 다양한 이미지 변형을 생성함으로써 모델의 견고성을 높이는 데이터 증강 방법입니다. AugMix 논문을 참조하십시오.
- Ultralytics 구현: classify_augmentations()
- 참고:
- 본질적으로, 세 가지 방법의 주요 차이점은 증강 정책이 정의되고 적용되는 방식에 있습니다.
- 세 가지 방법을 자세히 비교한 이 기사를 참조할 수 있습니다.
Link to this section무작위 지우기 (erasing)#
- 범위:
0.0-0.9 - 기본값:
0.4 - 사용법: 분류 학습 중에 이미지의 일부를 무작위로 지웁니다.
erasing하이퍼파라미터는 변환 적용 확률을 정의하며,erasing=0.9는 거의 모든 이미지가 지워지도록 보장하고erasing=0.0은 변환을 비활성화합니다. 예를 들어erasing=0.5이면 각 이미지는 50% 확률로 일부가 지워집니다. - 목적: 모델이 견고한 특징을 학습하도록 돕고 특정 이미지 영역에 과도하게 의존하는 것을 방지합니다. 예를 들어 안면 인식 시스템에서 무작위 지우기는 선글라스, 마스크 또는 기타 얼굴 특징을 부분적으로 가릴 수 있는 물체와 같은 부분적 가림(occlusion)에 대해 모델이 더 견고해지도록 돕습니다. 이는 모델이 단순히 가려질 수 있는 특징적인 부분에만 의존하지 않고 여러 얼굴 특징을 사용하여 개인을 식별하도록 강제함으로써 실제 환경에서의 성능을 향상시킵니다.
- Ultralytics 구현: classify_augmentations()
- 참고:
- The
erasingaugmentation comes with ascale,ratio, andvaluehyperparameters that cannot be changed with the current implementation. Their default values are(0.02, 0.33),(0.3, 3.3), and0, respectively, as stated in the PyTorch documentation. erasing하이퍼파라미터의 상한값은 모든 이미지에 변환이 적용되는 것을 방지하기 위해0.9로 설정됩니다.
- The
erasing 끄기 | erasing 켜기 (예시 1) | erasing 켜기 (예시 2) | erasing 켜기 (예시 3) |
|---|---|---|---|
|  |  |  |
Link to this section고급 증강 기능#
Link to this section사용자 정의 Albumentations 변환 (augmentations)#
- 유형: Albumentations 변환의
list - 기본값:
None - 사용법: Python API를 사용하여 데이터 증강을 위한 사용자 정의 Albumentations 변환을 제공할 수 있습니다. 이 파라미터는 학습 중에 기본 Albumentations 변환 대신 적용될 Albumentations 변환 객체의 리스트를 허용합니다.
- 목적: 방대한 Albumentations 변환 라이브러리를 활용하여 데이터 증강 전략을 정밀하게 제어할 수 있습니다. 이는 고급 색상 조정, 노이즈 주입 또는 도메인별 변환과 같이 내장된 YOLO 옵션을 넘어선 전문적인 증강이 필요할 때 특히 유용합니다.
- Ultralytics 구현: Albumentations
import albumentations as A
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n.pt")
# Define custom Albumentations transforms
custom_transforms = [
A.Blur(blur_limit=7, p=0.5),
A.GaussNoise(var_limit=(10.0, 50.0), p=0.3),
A.CLAHE(clip_limit=4.0, p=0.5),
A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.5),
A.HueSaturationValue(hue_shift_limit=20, sat_shift_limit=30, val_shift_limit=20, p=0.5),
]
# Train with custom Albumentations transforms
model.train(
data="coco8.yaml",
epochs=100,
augmentations=custom_transforms, # Pass custom transforms
imgsz=640,
)핵심 사항:
- Python API 전용: 사용자 정의 Albumentations 변환은 현재 Python API를 통해서만 지원됩니다. CLI나 YAML 구성 파일을 통해서는 지정할 수 없습니다.
- 기본 변환 대체:
augmentations파라미터를 통해 사용자 정의 변환을 제공하면 기본 Albumentations 변환을 완전히 대체합니다. 기본 YOLO 증강(mosaic,hsv_h,hsv_s,degrees등)은 활성 상태로 유지되며 독립적으로 적용됩니다. - 바운딩 박스 호환성: 공간 변환(이미지의 기하학적 구조를 변경하는 변환)을 사용할 때는 주의하십시오. Ultralytics는 바운딩 박스 조정을 자동으로 처리하지만 일부 복잡한 변환은 추가 구성이 필요할 수 있습니다.
- 방대한 라이브러리: Albumentations는 70개 이상의 다양한 변환을 제공합니다. Albumentations 문서를 탐색하여 사용 가능한 모든 옵션을 확인하십시오.
- 성능 고려 사항: 너무 많은 증강을 추가하거나 계산 비용이 많이 드는 변환을 사용하면 학습 속도가 느려질 수 있습니다. 작은 세트로 시작하여 학습 속도를 모니터링하십시오.
일반적인 사용 사례:
- 의료 영상: X-ray나 MRI 이미지 증강을 위한 탄성 변형(elastic deformations) 또는 격자 왜곡(grid distortions)과 같은 전문 변환 적용
- 항공/위성 이미지: 오버헤드 관점에 최적화된 변환 사용
- 저조도 조건: 까다로운 조명을 시뮬레이션하기 위한 노이즈 및 밝기 조정 적용
- 산업 검사: 품질 관리 애플리케이션을 위한 결함 형태의 패턴이나 질감 변형 추가
호환성 참고 사항:
- Albumentations 버전 1.0.3 이상 필요
- 모든 YOLO 탐지(detection) 및 분할(segmentation) 작업과 호환
- 분류(classification) 작업에는 적용 불가(분류는 다른 증강 파이프라인을 사용함)
Albumentations 및 사용 가능한 변환에 대한 자세한 내용은 공식 Albumentations 문서를 방문하십시오.
Link to this sectionFAQ#
Link to this section선택할 수 있는 증강이 너무 많습니다. 무엇을 사용해야 할지 어떻게 알 수 있나요?#
올바른 증강을 선택하는 것은 특정 사용 사례와 데이터셋에 따라 다릅니다. 결정을 돕기 위한 몇 가지 일반적인 지침은 다음과 같습니다:
- 대부분의 경우 색상과 밝기의 약간의 변화는 유익합니다.
hsv_h,hsv_s,hsv_v의 기본값은 훌륭한 시작점입니다. - 카메라의 관점이 일정하고 모델이 배포된 후에도 변하지 않는다면
rotation,translation,scale,shear또는perspective와 같은 기하학적 변환은 건너뛸 수 있습니다. 그러나 카메라 각도가 변할 수 있고 모델이 더 견고해져야 한다면 이러한 증강을 유지하는 것이 좋습니다. - 부분적으로 가려진 물체나 이미지당 여러 물체가 있는 것이 허용되고 레이블 값에 영향을 주지 않는 경우에만
mosaic증강을 사용하십시오. 또는mosaic을 활성 상태로 유지하되close_mosaic값을 높여 학습 과정 초기에 비활성화할 수도 있습니다.
요약하자면, 간단하게 유지하십시오. 적은 수의 증강으로 시작하여 필요에 따라 점진적으로 추가하십시오. 목표는 학습 과정을 복잡하게 만드는 것이 아니라 모델의 일반화와 견고성을 향상시키는 것입니다. 또한 적용하는 증강이 모델이 운영 환경에서 직면할 동일한 데이터 분포를 반영하는지 확인하십시오.
Link to this section학습을 시작할 때 albumentations: Blur[...] 참조가 표시됩니다. Ultralytics YOLO가 흐림 처리와 같은 추가 증강을 실행한다는 의미인가요?#
albumentations 패키지가 설치되어 있으면 Ultralytics는 이를 사용하여 일련의 추가 이미지 증강을 자동으로 적용합니다. 이러한 증강은 내부적으로 처리되며 추가 구성이 필요하지 않습니다.
적용된 변환의 전체 목록은 기술 문서와 Albumentations 통합 가이드에서 확인할 수 있습니다. 확률 p가 0보다 큰 증강만 활성화된다는 점을 유의하십시오. 이러한 증강은 흐림 효과나 그레이스케일 효과와 같은 실제 시각적 아티팩트를 모방하기 위해 낮은 빈도로 의도적으로 적용됩니다.
Python API를 사용하여 고유한 사용자 정의 Albumentations 변환을 제공할 수도 있습니다. 자세한 내용은 고급 증강 기능 섹션을 참조하십시오.
Link to this section학습을 시작할 때 albumentations에 대한 참조가 표시되지 않습니다. 왜 그런가요?#
albumentations 패키지가 설치되어 있는지 확인하십시오. 설치되어 있지 않다면 pip install albumentations를 실행하여 설치할 수 있습니다. 일단 설치되면 패키지가 자동으로 감지되어 Ultralytics에 의해 사용됩니다.
Link to this section증강을 어떻게 사용자 정의하나요?#
사용자 정의 데이터셋 클래스와 트레이너를 생성하여 증강을 사용자 정의할 수 있습니다. 예를 들어, 기본 Ultralytics 분류 증강을 PyTorch의 torchvision.transforms.Resize 또는 다른 변환으로 대체할 수 있습니다. 구현 세부 정보는 분류 문서의 사용자 정의 학습 예시를 참조하십시오.