Link to this sectionНабор данных KITTI#
![]()
Набор данных Ultralytics KITTI — это набор данных для 2D обнаружения объектов в беспилотном вождении, содержащий 7 481 размеченное изображение (5 985 для обучения и 1 496 для валидации) по 8 классам: car, van, truck, pedestrian, person_sitting, cyclist, tram и misc. Он выпущен Технологическим институтом Карлсруэ и Чикагским технологическим институтом Toyota; изображения взяты из реальных городских, сельских и шоссейных сценариев вождения.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
Более широкий набор данных KITTI Vision Benchmark Suite также включает оценку глубины, оптический поток, стереозрение и визуальную одометрию, но конфигурация Ultralytics kitti.yaml здесь настроена для 2D обнаружения объектов и полностью совместима с Ultralytics YOLO26.
Link to this sectionСтруктура набора данных#
Оригинальный тестовый набор KITTI здесь исключен, так как для него нет публичных аннотаций ground-truth.
Набор данных содержит 7 481 размеченное изображение с такими объектами, как автомобили, пешеходы и велосипедисты, разделенные на два предопределенных подмножества, описанных в конфигурации kitti.yaml:
| Split | Изображения | Описание |
|---|---|---|
| Обучение | 5 985 | Размеченные изображения для обучения моделей |
| Validation | 1 496 | Отложенные изображения для оценки и бенчмаркинга |
Link to this sectionКлассы объектов#
Файл kitti.yaml определяет 8 классов объектов, охватывающих транспортные средства, людей и других участников дорожного движения, часто встречающихся в сценах вождения:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionПрименение#
Набор данных KITTI поддерживает широкий спектр приложений 2D обнаружения в беспилотном вождении и робототехнике:
- Восприятие автономных транспортных средств: обучайте модели обнаруживать и отслеживать автомобили, пешеходов и велосипедистов, чтобы системы автономного вождения могли безопасно перемещаться.
- Разработка ADAS: создавайте функции помощи водителю, такие как предупреждение о столкновении и обнаружение пешеходов, на основе реальных видеозаписей вождения.
- Анализ трафика и дорожных сцен: обнаруживайте и подсчитывайте транспортные средства и участников дорожного движения для изучения транспортных потоков и безопасности дорожного движения.
- Бенчмаркинг компьютерного зрения: используйте KITTI в качестве стандартного теста для оценки моделей 2D обнаружения объектов и отслеживания.
Чтобы размечать собственные изображения вождения, обучать и управлять версиями наборов данных в браузере, используй полный рабочий процесс с Ultralytics Platform.
Link to this sectionYAML набора данных#
Ultralytics определяет конфигурацию набора данных KITTI с помощью YAML-файла. Этот файл указывает пути к набору данных, метки классов и метаданные, необходимые для обучения. Конфигурационный файл доступен по адресу https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionИспользование#
Чтобы обучить модель YOLO26n на наборе данных KITTI в течение 100 эпох с размером изображения 640, используй следующие команды. Набор данных (390.5 МБ) загружается автоматически при первом использовании. Для получения более подробной информации обратись к странице Обучение.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Ты также можешь выполнять задачи оценки, инференса и экспорта прямо из командной строки или Python API, используя тот же файл конфигурации.
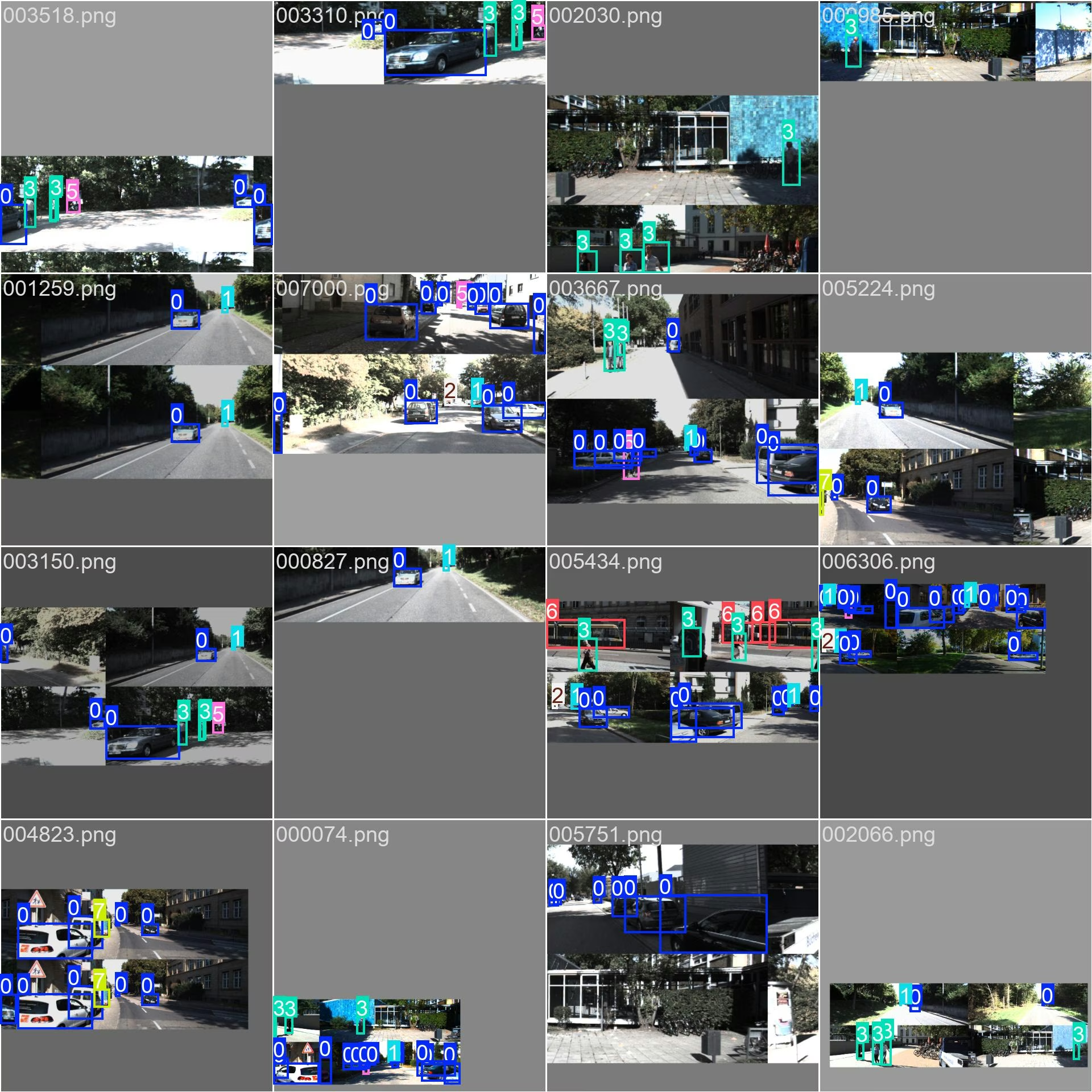
Link to this sectionПримеры изображений и аннотации#
На примере ниже показана сцена вождения из набора данных с аннотациями в виде 2D ограничивающих рамок. Изображения KITTI охватывают городские, сельские и шоссейные сцены, снятые в условиях реального трафика, что дает моделям разнообразные масштабы объектов, углы обзора и условия освещения.
Link to this sectionЦитирование и благодарности#
Если ты используешь набор данных KITTI в своих исследованиях, пожалуйста, процитируй следующую статью:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Мы выражаем признательность KITTI Vision Benchmark Suite за предоставление этого всеобъемлющего набора данных, который продолжает формировать прогресс в области компьютерного зрения, робототехники и автономных систем. Посети сайт KITTI для получения дополнительной информации.
Link to this sectionFAQ#
Link to this sectionДля чего используется набор данных KITTI?#
Набор данных Ultralytics KITTI используется для обучения и оценки моделей 2D обнаружения объектов для беспилотного вождения. Он предоставляет 7 481 размеченное изображение по 8 классам, включая автомобили, пешеходов и велосипедистов, и широко используется для бенчмаркинга моделей восприятия.
Link to this sectionСколько изображений и классов в наборе данных KITTI?#
Конфигурация Ultralytics KITTI содержит 7 481 изображение — 5 985 для обучения и 1 496 для валидации — без отдельного тестового набора. Каждое изображение размечено по 8 классам: car, van, truck, pedestrian, person_sitting, cyclist, tram и misc.
Link to this sectionВключает ли набор данных KITTI тестовую выборку?#
Нет. Конфигурация Ultralytics KITTI предоставляет только наборы для обучения (5 985 изображений) и валидации (1 496 изображений). Оригинальный тестовый набор KITTI исключен, так как у него нет публичных аннотаций ground-truth.
Link to this sectionКак скачать набор данных KITTI?#
Набор данных (390.5 МБ) загружается автоматически при первом запуске обучения с data="kitti.yaml" — никаких ручных действий не требуется. Ultralytics извлекает изображения и метки и распаковывает их в твою локальную директорию наборов данных. Ты можешь просмотреть связанные наборы данных в обзоре наборов данных для обнаружения.
Link to this sectionМогу ли я обучать модели Ultralytics YOLO26, используя набор данных KITTI?#
Да, KITTI полностью совместим с Ultralytics YOLO26. Ты можешь обучать и валидировать модели напрямую, используя предоставленный конфигурационный YAML-файл.
Link to this sectionГде я могу найти конфигурационный файл набора данных KITTI?#
Ты можешь найти файл kitti.yaml по адресу https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml. Он определяет пути к набору данных и 8 имен классов, используемых для обучения.