Link to this sectionKITTI Veri Kümesi#
![]()
Ultralytics KITTI veri seti, otonom sürüş için 2B nesne algılama veri setidir ve 8 sınıf (car, van, truck, pedestrian, person_sitting, cyclist, tram ve misc) genelinde 7.481 etiketli görüntü (eğitim için 5.985 ve doğrulama için 1.496) içerir. Karlsruhe Teknoloji Enstitüsü ve Chicago'daki Toyota Teknoloji Enstitüsü tarafından yayınlanan bu veri setindeki görüntüler, gerçek dünya kentsel, kırsal ve otoyol sürüş sahnelerinden alınmıştır.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
Daha kapsamlı olan KITTI Vision Benchmark Suite; derinlik tahmini, optik akış, stereo görme ve görsel odometriyi de kapsar, ancak buradaki Ultralytics kitti.yaml yapılandırması 2B nesne algılama için ayarlanmıştır ve Ultralytics YOLO26 ile tam uyumludur.
Link to this sectionVeri Kümesi Yapısı#
Orijinal KITTI test seti, kamuya açık temel doğruluk (ground-truth) etiketleri içermediği için burada hariç tutulmuştur.
Veri seti; araba, yaya ve bisikletli gibi nesneleri kapsayan 7.481 etiketli görüntü içerir ve kitti.yaml yapılandırması tarafından tanımlanan iki önceden belirlenmiş alt kümeye ayrılmıştır:
| Bölüm | Görüntüler | Açıklama |
|---|---|---|
| Eğit (Train) | 5.985 | Model eğitimi için etiketli görüntüler |
| Doğrulama | 1.496 | Değerlendirme ve kıyaslama için ayrılmış görüntüler |
Link to this sectionNesne Sınıfları#
kitti.yaml dosyası, sürüş sahnelerinde yaygın olarak görülen araçları, insanları ve diğer yol kullanıcılarını kapsayan 8 nesne sınıfını tanımlar:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionUygulamalar#
KITTI veri seti, otonom sürüş ve robotik alanlarında çeşitli 2B algılama uygulamalarını destekler:
- Otonom araç algısı: Otonom sürüş sistemlerinin güvenli bir şekilde hareket edebilmesi için araçları, yayaları ve bisikletlileri tespit etmek ve takip etmek üzere modeller eğit.
- ADAS geliştirme: Gerçek sürüş görüntüleri üzerinde çarpışma uyarısı ve yaya algılama gibi sürücü destek özellikleri oluştur.
- Trafik ve yol sahnesi analizi: Trafik akışını ve yol güvenliğini incelemek için araçları ve yol kullanıcılarını tespit et ve say.
- Bilgisayarlı görme kıyaslaması: KITTI'yi 2B nesne algılama ve izleme modellerini değerlendirmek için standart bir kıyaslama aracı olarak kullan.
Kendi sürüş görüntülerini etiketlemek, eğitmek ve veri seti sürümlerini tarayıcında yönetmek için Ultralytics Platform ile tam iş akışını çalıştır.
Link to this sectionVeri Kümesi YAML#
Ultralytics, KITTI veri seti yapılandırmasını bir YAML dosyası kullanarak tanımlar. Bu dosya, eğitim için gereken veri seti yollarını, sınıf etiketlerini ve meta verileri belirtir. Yapılandırma dosyasına https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml adresinden ulaşabilirsin.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionKullanım#
KITTI veri setinde 640 görüntü boyutuyla 100 dönem (epoch) boyunca bir YOLO26n modeli eğitmek için aşağıdaki komutları kullan. Veri seti (390.5 MB), ilk kullanımda otomatik olarak indirilir. Daha fazla ayrıntı için Eğitim sayfasına bak.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Aynı yapılandırma dosyasını kullanarak komut satırı veya Python API üzerinden doğrudan değerlendirme, çıkarım ve dışa aktarma görevlerini de gerçekleştirebilirsin.
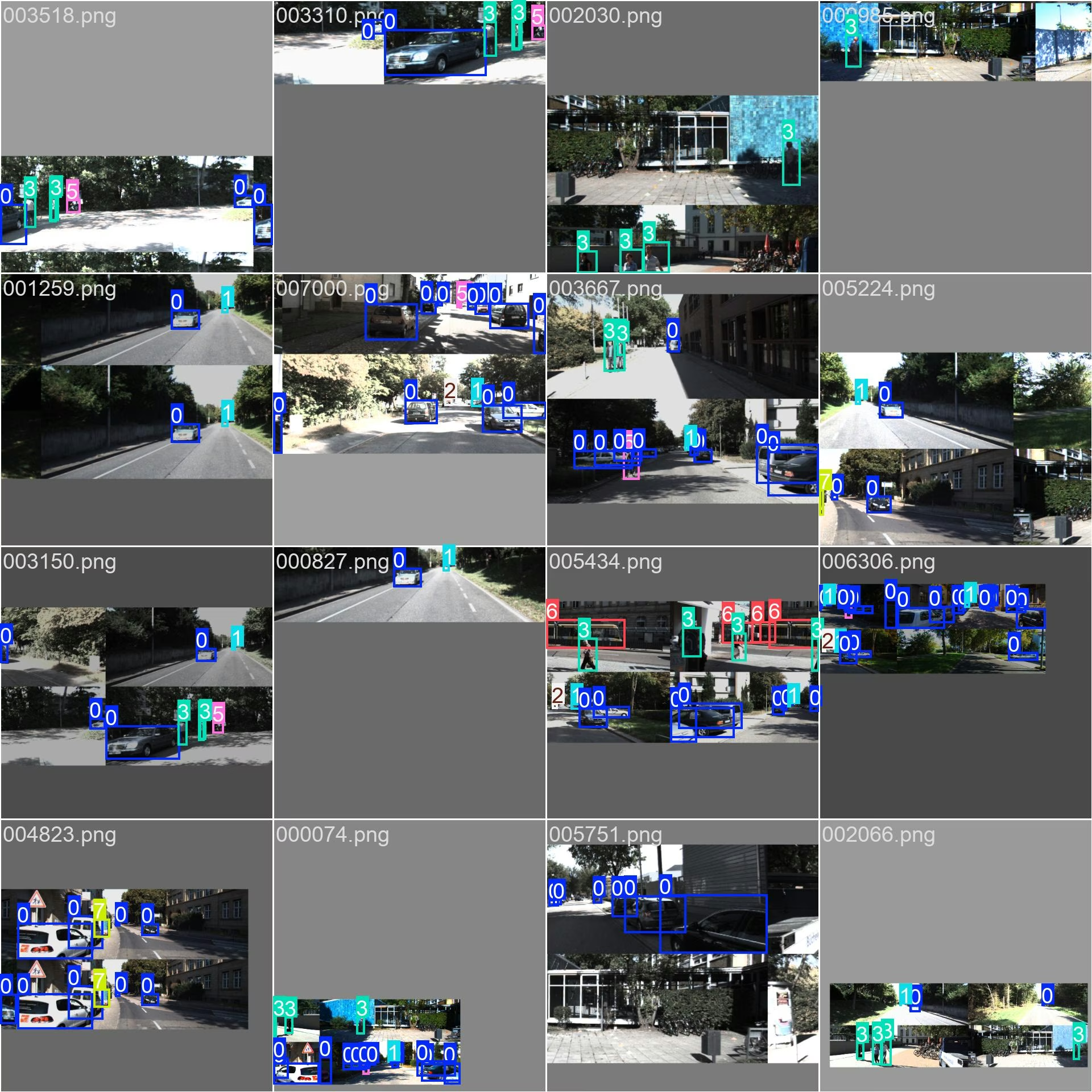
Link to this sectionÖrnek Görüntüler ve Ek Açıklamalar#
Aşağıdaki örnek, veri setinden 2B sınırlayıcı kutu etiketleriyle birlikte bir sürüş sahnesini göstermektedir. KITTI görüntüleri, gerçek trafikte yakalanan kentsel, kırsal ve otoyol sahnelerini kapsar ve modellere çeşitli nesne ölçekleri, bakış açıları ve aydınlatma koşulları sunar.
Link to this sectionAlıntılar ve Teşekkür#
KITTI veri setini araştırmanda kullanıyorsan, lütfen aşağıdaki makaleyi kaynak göster:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Bilgisayarlı görme, robotik ve otonom sistemlerde ilerlemeye katkı sağlamaya devam eden bu kapsamlı veri setini sağladığı için KITTI Vision Benchmark Suite'e teşekkür ederiz. Daha fazla bilgi için KITTI web sitesini ziyaret et.
Link to this sectionSSS#
Link to this sectionKITTI veri seti ne için kullanılır?#
Ultralytics KITTI veri seti, otonom sürüşe yönelik 2B nesne algılama modellerini eğitmek ve değerlendirmek için kullanılır. Araçlar, yayalar ve bisikletliler dahil olmak üzere 8 sınıf genelinde 7.481 etiketli görüntü sağlar ve algılama modellerini kıyaslamak için yaygın olarak kullanılır.
Link to this sectionKITTI veri setinde kaç görüntü ve sınıf var?#
Ultralytics KITTI yapılandırması, ayrı bir test bölümü olmaksızın, 7.481 görüntü (eğitim için 5.985 ve doğrulama için 1.496) içerir. Her görüntü 8 sınıfa göre etiketlenmiştir: car, van, truck, pedestrian, person_sitting, cyclist, tram ve misc.
Link to this sectionKITTI veri seti bir test bölümü içeriyor mu?#
Hayır. Ultralytics KITTI yapılandırması yalnızca eğitim (5.985 görüntü) ve doğrulama (1.496 görüntü) bölümlerini sağlar. Orijinal KITTI test seti, kamuya açık temel doğruluk etiketleri içermediği için hariç tutulmuştur.
Link to this sectionKITTI veri setini nasıl indirebilirim?#
Veri seti (390.5 MB), data="kitti.yaml" ile ilk kez eğitim yaptığında otomatik olarak indirilir; manuel bir işlem gerekmez. Ultralytics görüntüleri ve etiketleri getirir ve bunları yerel veri seti dizinine çıkarır. İlgili veri setlerine algılama veri setlerine genel bakış sayfasından göz atabilirsin.
Link to this sectionKITTI veri setini kullanarak Ultralytics YOLO26 modellerini eğitebilir miyim?#
Evet, KITTI Ultralytics YOLO26 ile tam uyumludur. Sağlanan YAML yapılandırma dosyasını kullanarak modelleri doğrudan eğitebilir ve doğrulayabilirsin.
Link to this sectionKITTI veri seti yapılandırma dosyasını nerede bulabilirim?#
kitti.yaml dosyasına https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml adresinden erişebilirsin. Bu dosya, veri seti yollarını ve eğitim için kullanılan 8 sınıf adını tanımlar.