Link to this sectionTiger-Pose Veri Kümesi#
Link to this sectionGiriş#
Ultralytics, poz kestirimi görevleri için tasarlanmış çok yönlü bir koleksiyon olan Tiger-Pose veri kümesini sunar. Bu veri kümesi, bir YouTube videosundan alınan 263 görüntüden oluşur; bunların 210'u eğitim, 53'ü ise doğrulama için ayrılmıştır. Poz kestirimi algoritmalarını test etmek ve sorun gidermek için mükemmel bir kaynak görevi görür.
210 görüntülük yönetilebilir eğitim setiyle Tiger-Pose veri seti, eğitim hatlarını değerlendirmek, olası hataları belirlemek ve pose estimation için daha büyük veri setleriyle çalışmadan önce değerli bir ön adım işlevi görmek için uygun olan çeşitlilik sunar.
İş akışın bu küçük sette temiz bir şekilde eğitime başladığında, kendi hayvan veya nesne anahtar noktalarını ekle ve tarayıcıdan ayrılmadan Ultralytics Platform üzerinde eğitimi ölçeklendir.
Link to this sectionVeri Kümesi Yapısı#
- Toplam görüntü sayısı: 263 (210 eğitim / 53 doğrulama).
- Anahtar noktalar: Kaplan başına 12 adet (görünürlük bayrağı yok).
- İndirme boyutu: ~49.8 MB.
- Dizin düzeni:
labels/{train,val}altında,images/{train,val}dizinleriyle birlikte saklanan YOLO formatındaki anahtar noktalar.
Watch: Train an Ultralytics YOLO Pose Model on the Tiger-Pose Dataset
Link to this sectionVeri Kümesi YAML#
Bir YAML dosyası, veri kümesinin yapılandırma ayrıntılarını belirtmek için bir araç görevi görür. Dosya yolları, sınıf tanımları ve diğer ilgili bilgiler gibi önemli verileri kapsar. Özellikle tiger-pose.yaml dosyası için Ultralytics Tiger-Pose Veri Kümesi Yapılandırma Dosyası bağlantısını kontrol edebilirsin.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Tiger Pose dataset by Ultralytics
# Documentation: https://docs.ultralytics.com/datasets/pose/tiger-pose
# Example usage: yolo train data=tiger-pose.yaml
# parent
# ├── ultralytics
# └── datasets
# └── tiger-pose ← downloads here (49.8 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: tiger-pose # dataset root dir
train: images/train # train images (relative to 'path') 210 images
val: images/val # val images (relative to 'path') 53 images
# Keypoints
kpt_shape: [12, 2] # number of keypoints, number of dims (2 for x,y or 3 for x,y,visible)
flip_idx: [0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11]
# Classes
names:
0: tiger
# Keypoint names per class
kpt_names:
0:
- nose
- head
- withers
- tail_base
- right_hind_hock
- right_hind_paw
- left_hind_paw
- left_hind_hock
- right_front_wrist
- right_front_paw
- left_front_wrist
- left_front_paw
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/tiger-pose.zipLink to this sectionKullanım#
Tiger-Pose veri kümesi üzerinde 640 görüntü boyutuyla 100 epoch boyunca bir YOLO26n-pose modeli eğitmek için aşağıdaki kod parçacıklarını kullanabilirsin. Mevcut bağımsız değişkenlerin kapsamlı bir listesi için Eğitim sayfasına başvur.
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n-pose.pt") # load a pretrained model (recommended for training)
# Train the model
results = model.train(data="tiger-pose.yaml", epochs=100, imgsz=640)Link to this sectionÖrnek Görüntüler ve Ek Açıklamalar#
İşte Tiger-Pose veri kümesinden bazı görüntü örnekleri ve bunlara karşılık gelen açıklamalar:
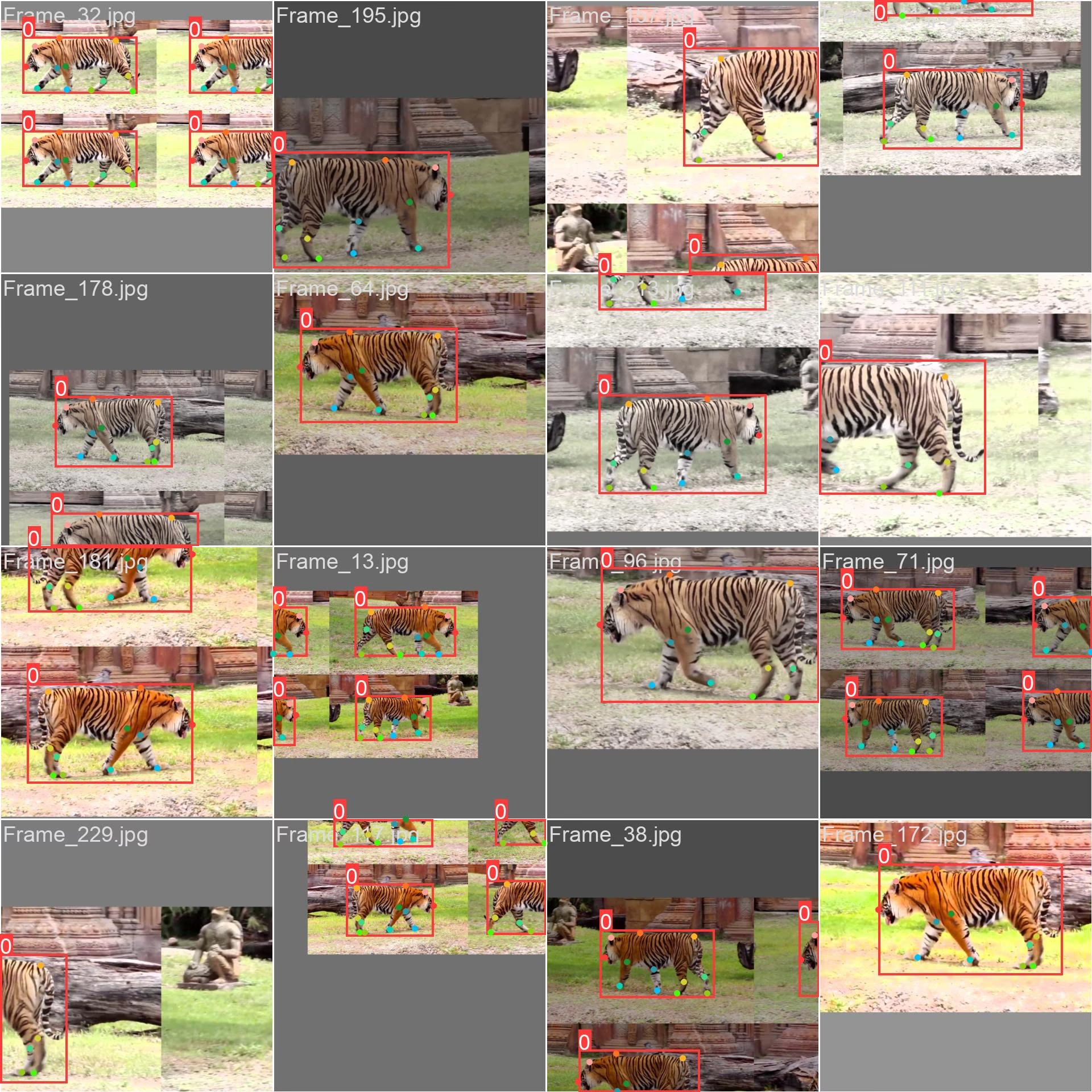
- Mozaiklenmiş Görüntü: Bu görüntü, mozaiklenmiş veri kümesi görüntülerinden oluşan bir eğitim grubunu göstermektedir. Mozaikleme, eğitim sırasında her eğitim grubundaki nesne ve sahne çeşitliliğini artırmak için birden fazla görüntüyü tek bir görüntüde birleştiren bir tekniktir. Bu, modelin farklı nesne boyutlarına, en-boy oranlarına ve bağlamlara genelleme yapma yeteneğini geliştirmeye yardımcı olur.
Örnek, Tiger-Pose veri kümesindeki görüntülerin çeşitliliğini ve karmaşıklığını, ayrıca eğitim sürecinde mozaikleme kullanmanın faydalarını göstermektedir.
Link to this sectionÇıkarım Örneği#
Eğitimden sonra, en iyi kontrol noktanı yükle ve yeni görüntüler veya videolar üzerinde çıkarım yap — bağımsız değişkenlerin tam listesi için Prediction sayfasına bak.
from ultralytics import YOLO
# Load a model
model = YOLO("path/to/best.pt") # load a tiger-pose trained model
# Run inference
results = model.predict(source="https://youtu.be/MIBAT6BGE6U", show=True)Link to this sectionAlıntılar ve Teşekkür#
Ultralytics, Tiger-Pose veri kümesi ek açıklamalarını AGPL-3.0 License altında yayımlar. Kaynak video, çıkarılan kareleri kullanmadan veya yeniden dağıtmadan önce gözden geçirilmesi gereken orijinal şartlarına tabidir.
Link to this sectionSSS#
Link to this sectionUltralytics Tiger-Pose veri kümesi ne için kullanılır?#
Ultralytics Tiger-Pose veri seti, YouTube videosundan alınan 263 görüntüden oluşan poz kestirim görevleri için tasarlanmıştır. Veri seti, test etme, eğitme ve poz kestirim algoritmalarını geliştirme için uygun olan 210 eğitim görüntüsü ve 53 doğrulama görüntüsüne bölünmüştür.
Link to this sectionTiger-Pose veri kümesinde nasıl YOLO26 modeli eğitirim?#
yolo26n-pose.pt dosyasını yükle ve model.train(data="tiger-pose.yaml", epochs=100, imgsz=640) komutunu çalıştır — tam Python ve CLI kod parçacıkları için yukarıdaki Train Example bölümüne ve kapsamlı bağımsız değişken listesi için Training sayfasına bak.
Link to this sectiontiger-pose.yaml dosyası hangi yapılandırmaları içerir?#
tiger-pose.yaml dosyası veri seti yolunu, train/val görüntü dizinlerini, tek bir sınıfı (tiger) ve kpt_shape: [12, 2] değerini (görünürlük bayrağı olmayan örnek başına 12 anahtar nokta) tanımlar. Tam yapılandırma için Ultralytics Tiger-Pose Dataset Configuration File dosyasına bak.
Link to this sectionTiger-Pose veri kümesinde eğitilmiş bir YOLO26 modeliyle nasıl çıkarım yapabilirim?#
Eğitilmiş kontrol noktanı (örneğin, path/to/best.pt) yükle ve model.predict(source=..., show=True) komutunu çalıştır — tam Python ve CLI kod parçacıkları için yukarıdaki Inference Example bölümüne ve bağımsız değişkenlerin tam listesi için Prediction sayfasına bak.
Link to this sectionPoz kestirimi için Tiger-Pose veri kümesini kullanmanın faydaları nelerdir?#
Toplam 263 görüntü (210 eğitim / 53 doğrulama), 1 sınıf, örnek başına 12 anahtar nokta ve ~49.8 MB indirme boyutu ile Tiger-Pose, hızlı bir şekilde yönetilebilecek kadar küçük ancak poz eğitim hattını doğrulamak ve daha büyük veri setleriyle çalışmadan önce hataları tanımlamak için yeterince çeşitlidir.