Gelişmiş Veri Görselleştirme: Ultralytics YOLO26 ile Isı Haritaları 🚀
Isı Haritalarına Giriş
![]()
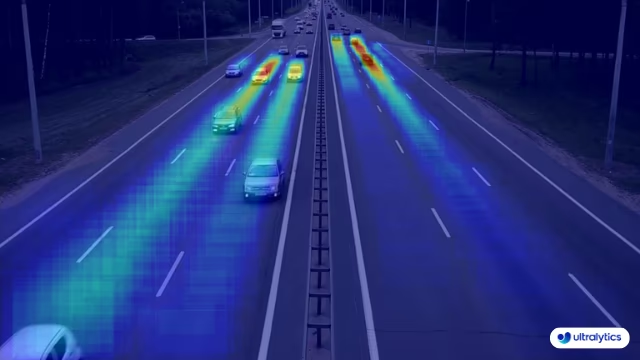
Ultralytics YOLO26 ile oluşturulan bir ısı haritası, karmaşık verileri canlı, renk kodlu bir matrise dönüştürür. Bu görsel araç, farklı veri değerlerini temsil etmek için bir renk spektrumu kullanır; burada daha sıcak tonlar daha yüksek yoğunlukları, daha soğuk tonlar ise daha düşük değerleri gösterir. Isı haritaları, karmaşık veri desenlerini, korelasyonları ve anormallikleri görselleştirmede üstündür ve çeşitli alanlarda veri yorumlamaya erişilebilir ve ilgi çekici bir yaklaşım sunar.
İzle: Ultralytics YOLO26 ile Isı Haritaları
Veri Analizi için Neden Isı Haritalarını Seçmelisiniz?
- Sezgisel Veri Dağılımı Görselleştirmesi: Isı haritaları, veri yoğunluğunun ve dağılımının anlaşılmasını basitleştirir ve karmaşık veri kümelerini kolay anlaşılır görsel formatlara dönüştürür.
- Verimli Desen Algılama: Verileri ısı haritası biçiminde görselleştirerek, eğilimleri, kümeleri ve aykırı değerleri tespit etmek kolaylaşır, bu da daha hızlı analiz ve içgörülere olanak tanır.
- Gelişmiş Uzamsal Analiz ve Karar Alma: Isı haritaları, uzamsal ilişkileri göstermede etkili olup, iş zekası, çevre çalışmaları ve şehir planlaması gibi sektörlerde karar alma süreçlerine yardımcı olur.
Gerçek Dünya Uygulamaları
| Taşıma | Perakende |
|---|---|
 |  |
| Ultralytics YOLO26 Ulaşım Isı Haritası | Ultralytics YOLO26 Perakende Isı Haritası |
Ultralytics YOLO kullanarak ısı haritaları
# Run a heatmap example
yolo solutions heatmap show=True
# Pass a source video
yolo solutions heatmap source="path/to/video.mp4"
# Pass a custom colormap
yolo solutions heatmap colormap=cv2.COLORMAP_INFERNO
# Heatmaps + object counting
yolo solutions heatmap region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("heatmap_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# For object counting with heatmap, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # rectangle region
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # polygon points
# Initialize heatmap object
heatmap = solutions.Heatmap(
show=True, # display the output
model="yolo26n.pt", # path to the YOLO26 model file
colormap=cv2.COLORMAP_PARULA, # colormap of heatmap
# region=region_points, # object counting with heatmaps, you can pass region_points
# classes=[0, 2], # generate heatmap for specific classes, e.g., person and car.
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = heatmap(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
Heatmap() Argümanlar
İşte şunları içeren bir tablo: Heatmap argümanlar:
| Argüman | Tür | Varsayılan | Açıklama |
|---|---|---|---|
model | str | None | Bir Ultralytics YOLO model dosyasının yolu. |
colormap | int | cv2.COLORMAP_DEEPGREEN | Isı haritası için kullanılacak renk haritası. |
show_in | bool | True | Video akışında giriş sayılarının görüntülenip görüntülenmeyeceğini kontrol etme işareti. |
show_out | bool | True | Video akışında çıkış sayılarının görüntülenip görüntülenmeyeceğini kontrol etme işareti. |
region | list | '[(20, 400), (1260, 400)]' | Sayma bölgesini tanımlayan nokta listesi. |
Ayrıca farklı olanları da uygulayabilirsiniz track içindeki argümanlar Heatmap çözümü.
| Argüman | Tür | Varsayılan | Açıklama |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Kullanılacak izleme algoritmasını belirtir, örneğin: bytetrack.yaml veya botsort.yaml. |
conf | float | 0.1 | Algılamalar için güven eşiğini ayarlar; daha düşük değerler daha fazla nesnenin izlenmesine olanak tanır ancak yanlış pozitifleri içerebilir. |
iou | float | 0.7 | Çakışan algılamaları filtrelemek için Intersection over Union (IoU) eşiğini ayarlar. |
classes | list | None | Sonuçları sınıf indeksine göre filtreler. Örneğin, classes=[0, 2, 3] yalnızca belirtilen sınıfları izler. |
verbose | bool | True | İzleme sonuçlarının görüntülenmesini kontrol eder ve izlenen nesnelerin görsel bir çıktısını sağlar. |
device | str | None | Çıkarım için cihazı belirtir (örn. cpu, cuda:0 veya 0). Kullanıcıların model yürütme için CPU, belirli bir GPU veya diğer işlem cihazları arasında seçim yapmasına olanak tanır. |
Ek olarak, desteklenen görselleştirme argümanları aşağıda listelenmiştir:
| Argüman | Tür | Varsayılan | Açıklama |
|---|---|---|---|
show | bool | False | Eğer True, ek açıklamalı görüntüleri veya videoları bir pencerede görüntüler. Geliştirme veya test sırasında anında görsel geri bildirim için kullanışlıdır. |
line_width | int or None | None | Sınırlayıcı kutuların çizgi genişliğini belirtir. Eğer None, çizgi genişliği, görüntü boyutuna göre otomatik olarak ayarlanır. Netlik için görsel özelleştirme sağlar. |
show_conf | bool | True | Etiketin yanında her algılama için güvenilirlik puanını görüntüler. Modelin her algılama için kesinliği hakkında fikir verir. |
show_labels | bool | True | Görsel çıktıdaki her algılama için etiketleri görüntüler. Algılanan nesnelerin anında anlaşılmasını sağlar. |
Isı Haritası RENK HARİTALARI
| Renk Haritası Adı | Açıklama |
|---|---|
cv::COLORMAP_AUTUMN | Sonbahar renk haritası |
cv::COLORMAP_BONE | Kemik renk haritası |
cv::COLORMAP_JET | Jet renk haritası |
cv::COLORMAP_WINTER | Kış renk haritası |
cv::COLORMAP_RAINBOW | Gökkuşağı renk haritası |
cv::COLORMAP_OCEAN | Okyanus renk haritası |
cv::COLORMAP_SUMMER | Yaz renk haritası |
cv::COLORMAP_SPRING | Bahar renk haritası |
cv::COLORMAP_COOL | Soğuk renk haritası |
cv::COLORMAP_HSV | HSV (Renk Tonu, Doygunluk, Değer) renk haritası |
cv::COLORMAP_PINK | Pembe renk haritası |
cv::COLORMAP_HOT | Sıcak renk haritası |
cv::COLORMAP_PARULA | Parula renk haritası |
cv::COLORMAP_MAGMA | Magma renk haritası |
cv::COLORMAP_INFERNO | Inferno renk haritası |
cv::COLORMAP_PLASMA | Plazma renk haritası |
cv::COLORMAP_VIRIDIS | Viridis renk haritası |
cv::COLORMAP_CIVIDIS | Cividis renk haritası |
cv::COLORMAP_TWILIGHT | Twilight renk haritası |
cv::COLORMAP_TWILIGHT_SHIFTED | Kaydırılmış Alacakaranlık renk haritası |
cv::COLORMAP_TURBO | Turbo renk haritası |
cv::COLORMAP_DEEPGREEN | Koyu Yeşil renk haritası |
Bu renk haritaları, verileri farklı renk gösterimleriyle görselleştirmek için yaygın olarak kullanılır.
Ultralytics YOLO26'da Isı Haritaları Nasıl Çalışır
Ultralytics YOLO26'daki Isı Haritası çözümü, ObjectCounter sınıfını genişleterek video akışlarındaki hareket desenlerini oluşturur ve görselleştirir. Başlatıldığında, çözüm boş bir ısı haritası katmanı oluşturur ve nesneler kare içinde hareket ettikçe bu katman güncellenir.
Algılanan her nesne için çözüm:
- YOLO26'nın track yeteneklerini kullanarak nesneyi kareler arasında track eder.
- Nesnenin konumundaki ısı haritası yoğunluğunu günceller
- Yoğunluk değerlerini görselleştirmek için seçilen bir renk haritasını uygular
- Renkli ısı haritasını orijinal kare üzerine yerleştirir
Sonuç, zaman içinde oluşan, video verilerinizdeki trafik düzenlerini, kalabalık hareketlerini veya diğer mekansal davranışları ortaya çıkaran dinamik bir görselleştirmedir.
SSS
Ultralytics YOLO26 ısı haritalarını nasıl oluşturur ve faydaları nelerdir?
Ultralytics YOLO26, karmaşık verileri farklı tonların veri yoğunluklarını temsil ettiği renk kodlu bir matrise dönüştürerek ısı haritaları oluşturur. Isı haritaları, verilerdeki desenleri, korelasyonları ve anormallikleri görselleştirmeyi kolaylaştırır. Daha sıcak tonlar daha yüksek değerleri gösterirken, daha soğuk tonlar daha düşük değerleri temsil eder. Başlıca faydaları arasında verilerin sezgisel görselleştirilmesi, verimli desen algılama ve karar verme için geliştirilmiş uzamsal analiz yer alır. Daha fazla ayrıntı ve yapılandırma seçeneği için Isı Haritası Yapılandırması bölümüne bakın.
Ultralytics YOLO26'yı nesne track yapmak ve eş zamanlı olarak ısı haritası oluşturmak için kullanabilir miyim?
Evet, Ultralytics YOLO26, nesne track ve ısı haritası oluşturmayı eş zamanlı olarak destekler. Bu, kendi Heatmap nesne track modelleriyle entegre çözümü aracılığıyla gerçekleştirilebilir. Bunu yapmak için ısı haritası nesnesini başlatmanız ve YOLO26'nın track yeteneklerini kullanmanız gerekir. İşte basit bir örnek:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(colormap=cv2.COLORMAP_PARULA, show=True, model="yolo26n.pt")
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
Daha fazla rehberlik için İzleme Modu sayfasını kontrol edin.
Ultralytics YOLO26 ısı haritalarını OpenCV veya Matplotlib gibi diğer veri görselleştirme araçlarından farklı kılan nedir?
Ultralytics YOLO26 ısı haritaları, gerçek zamanlı veri analizi için uçtan uca bir çözüm sunarak, nesne algılama ve track modelleriyle entegrasyon için özel olarak tasarlanmıştır. OpenCV veya Matplotlib gibi genel görselleştirme araçlarının aksine, YOLO26 ısı haritaları performans ve otomatik işleme için optimize edilmiştir; kalıcı track, bozunma faktörü ayarlaması ve gerçek zamanlı video bindirme gibi özellikleri destekler. YOLO26'nın benzersiz özellikleri hakkında daha fazla bilgi için Ultralytics YOLO26 Tanıtımı sayfasını ziyaret edin.
Ultralytics YOLO26 kullanarak ısı haritalarında yalnızca belirli nesne sınıflarını nasıl görselleştirebilirim?
Belirli nesne sınıflarını, içindeki istenen sınıfları belirterek görselleştirebilirsiniz. track() YOLO modelinin yöntemi. Örneğin, yalnızca arabaları ve kişileri görselleştirmek istiyorsanız (sınıf indekslerinin 0 ve 2 olduğunu varsayarak), şunu ayarlayabilirsiniz: classes parametresini uygun şekilde ayarlayın.
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(show=True, model="yolo26n.pt", classes=[0, 2])
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
İşletmeler veri analizinde ısı haritası oluşturmak için neden Ultralytics YOLO26'yı seçmeli?
Ultralytics YOLO26, gelişmiş nesne algılama ve gerçek zamanlı ısı haritası oluşturmanın sorunsuz entegrasyonunu sunarak, verileri daha etkili bir şekilde görselleştirmek isteyen işletmeler için ideal bir seçim haline gelir. Temel avantajları arasında sezgisel veri dağılımı görselleştirmesi, verimli desen algılama ve daha iyi karar verme için geliştirilmiş uzamsal analiz yer alır. Ek olarak, YOLO26'nın kalıcı track, özelleştirilebilir renk haritaları ve çeşitli dışa aktarma formatları desteği gibi son teknoloji özellikleri, onu kapsamlı veri analizi için TensorFlow ve OpenCV gibi diğer araçlardan üstün kılar. İş uygulamaları hakkında daha fazla bilgiyi Ultralytics Planları sayfasında bulabilirsiniz.







