Ultralytics YOLO26 Kullanarak Park Yönetimi 🚀
Park Yönetim Sistemi Nedir?
Ultralytics YOLO26 ile park yönetimi, alanları düzenleyerek ve müsaitlik durumunu izleyerek verimli ve güvenli park etmeyi sağlar. YOLO26, gerçek zamanlı araç detect ve park doluluk oranına ilişkin içgörüler aracılığıyla otopark yönetimini geliştirebilir.
İzle: Ultralytics ile Otopark Yönetim Sistemi Nasıl Oluşturulur | Gerçek Zamanlı Araç Algılama 🚗
Park Yönetim Sisteminin Avantajları
- Verimlilik: Otopark yönetimi, park alanlarının kullanımını optimize eder ve tıkanıklığı azaltır.
- Güvenlik ve Emniyet: YOLO26 kullanarak park yönetimi, gözetim ve güvenlik önlemleri aracılığıyla hem insanların hem de araçların güvenliğini artırır.
- Azaltılmış Emisyonlar: YOLO26 kullanarak park yönetimi, otoparklardaki bekleme süresini ve emisyonları en aza indirmek için trafik akışını yönetir.
Gerçek Dünya Uygulamaları
| Otopark Yönetim Sistemi | Otopark Yönetim Sistemi |
|---|---|
 |  |
| Ultralytics YOLO26 Kullanarak Park Yönetimi Hava Görünümü | Ultralytics YOLO26 Kullanarak Park Yönetimi Üst Görünümü |
Park Yönetim Sistemi Kod İş Akışı
Nokta seçimi artık kolay
Park noktalarını seçmek, park yönetimi sistemlerinde kritik ve karmaşık bir görevdir. Ultralytics, park alanı alanlarını tanımlamanıza olanak tanıyan ve daha sonra ek işlemler için kullanılabilecek bir araç olan "Park yeri etiketleyici" sağlayarak bu süreci kolaylaştırır.
Adım-1: Otoparkı yönetmek istediğiniz video veya kamera akışından bir kare yakalayın.
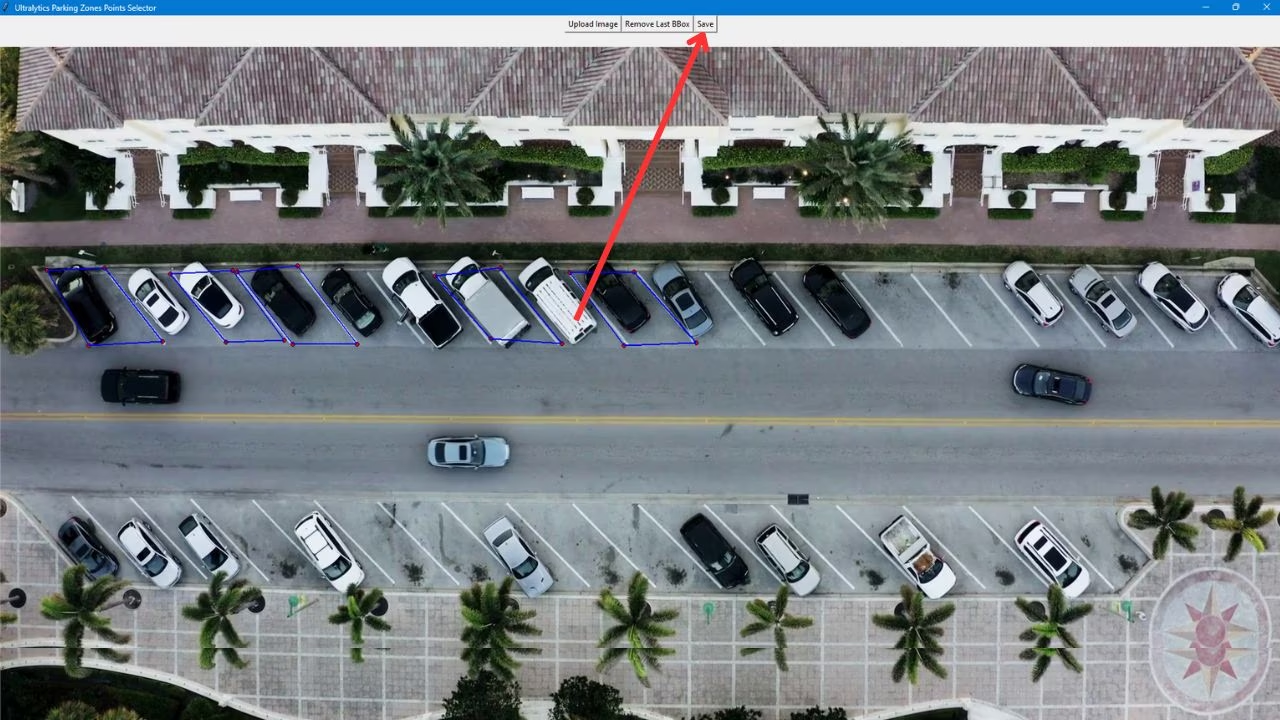
Adım-2: Bir resim seçebileceğiniz ve çokgenler oluşturmak için fare tıklamasıyla park bölgelerini ana hatlarıyla belirtmeye başlayabileceğiniz bir grafik arayüzü başlatmak için sağlanan kodu kullanın.
Otopark alanı etiketleyicisi Ultralytics YOLO
Yükleme için ek adım tkinter
Genel olarak, tkinter Python ile birlikte gelir. Ancak, gelmediyse, vurgulanan adımları kullanarak kurabilirsiniz:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Mimari:
sudo pacman -S tk - Windows: Python'u yeniden yükleyin ve onay kutusunu etkinleştirin
tcl/tk and IDLEaçık İsteğe Bağlı Özellikler kurulum sırasında - MacOS: Python'u şuradan yeniden yükleyin: https://www.python.org/downloads/macos/ veya
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Adım-3: Çokgenlerle park alanlarını tanımladıktan sonra, save çalışma dizininizde verileri içeren bir JSON dosyası depolamak için tıklayın.
Adım-4: Artık sağlanan kodu Ultralytics YOLO ile park yönetimi için kullanabilirsiniz.
Ultralytics YOLO Kullanarak Otopark Yönetimi
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Not
Öncelikle şu komutu kullanarak park bölgesi açıklamaları oluşturun ParkingPtsSelection() Python yukarıdaki 2. adımda), ardından JSON dosyasını CLI aktarın.
ParkingManagement Argümanlar
İşte şunları içeren bir tablo: ParkingManagement argümanlar:
| Argüman | Tür | Varsayılan | Açıklama |
|---|---|---|---|
model | str | None | Bir Ultralytics YOLO model dosyasının yolu. |
json_file | str | None | Tüm otopark koordinat verilerini içeren JSON dosyasına giden yol. |
ParkingManagement çözümü, birkaçının kullanımına izin verir track parametreler:
| Argüman | Tür | Varsayılan | Açıklama |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Kullanılacak izleme algoritmasını belirtir, örneğin: bytetrack.yaml veya botsort.yaml. |
conf | float | 0.1 | Algılamalar için güven eşiğini ayarlar; daha düşük değerler daha fazla nesnenin izlenmesine olanak tanır ancak yanlış pozitifleri içerebilir. |
iou | float | 0.7 | Çakışan algılamaları filtrelemek için Intersection over Union (IoU) eşiğini ayarlar. |
classes | list | None | Sonuçları sınıf indeksine göre filtreler. Örneğin, classes=[0, 2, 3] yalnızca belirtilen sınıfları izler. |
verbose | bool | True | İzleme sonuçlarının görüntülenmesini kontrol eder ve izlenen nesnelerin görsel bir çıktısını sağlar. |
device | str | None | Çıkarım için cihazı belirtir (örn. cpu, cuda:0 veya 0). Kullanıcıların model yürütme için CPU, belirli bir GPU veya diğer işlem cihazları arasında seçim yapmasına olanak tanır. |
Ayrıca, aşağıdaki görselleştirme seçenekleri desteklenir:
| Argüman | Tür | Varsayılan | Açıklama |
|---|---|---|---|
show | bool | False | Eğer True, ek açıklamalı görüntüleri veya videoları bir pencerede görüntüler. Geliştirme veya test sırasında anında görsel geri bildirim için kullanışlıdır. |
line_width | int or None | None | Sınırlayıcı kutuların çizgi genişliğini belirtir. Eğer None, çizgi genişliği, görüntü boyutuna göre otomatik olarak ayarlanır. Netlik için görsel özelleştirme sağlar. |
SSS
Ultralytics YOLO26, park yönetimi sistemlerini nasıl geliştirir?
Ultralytics YOLO26, gerçek zamanlı araç detect ve izleme sağlayarak park yönetimi sistemlerini önemli ölçüde geliştirir. Bu, park alanlarının optimize edilmiş kullanımını, trafik sıkışıklığının azalmasını ve sürekli gözetim yoluyla güvenliğin artmasını sağlar. Park Yönetim Sistemi, verimli trafik akışı sağlayarak park alanlarındaki bekleme sürelerini ve emisyonları en aza indirir, böylece çevresel sürdürülebilirliğe katkıda bulunur. Daha fazla ayrıntı için park yönetimi kod iş akışına başvurun.
Akıllı park için Ultralytics YOLO26 kullanmanın faydaları nelerdir?
Akıllı park için Ultralytics YOLO26 kullanmanın birçok faydası vardır:
- Verimlilik: Otopark alanlarının kullanımını optimize eder ve tıkanıklığı azaltır.
- Güvenlik ve Emniyet: Gözetimi artırır ve araçların ve yayaların güvenliğini sağlar.
- Çevresel Etki: Araçların rölanti sürelerini en aza indirerek emisyonların azaltılmasına yardımcı olur. Park Yönetim Sisteminin Avantajları bölümünde daha fazla fayda keşfedin.
Ultralytics YOLO26 kullanarak park alanlarını nasıl tanımlayabilirim?
Ultralytics YOLO26 ile park alanlarını tanımlamak oldukça basittir:
- Bir video veya kamera akışından bir kare yakalayın.
- Bir görüntü seçmek ve otopark alanlarını tanımlamak için çokgenler çizmek üzere bir GUI başlatmak için sağlanan kodu kullanın.
- Etiketlenmiş verileri daha fazla işlemek için JSON formatında kaydedin. Kapsamlı talimatlar için yukarıdaki nokta seçimi bölümüne bakın.
YOLO26 modelini belirli park yönetimi ihtiyaçları için özelleştirebilir miyim?
Evet, Ultralytics YOLO26, belirli park yönetimi ihtiyaçları için özelleştirmeye olanak tanır. Şunlar gibi parametreleri ayarlayabilirsiniz: dolu ve boş bölge renkleri, metin görüntüleme için kenar boşlukları ve çok daha fazlası. Şunu kullanarak: ParkingManagement sınıfının argümanlar, modeli özel gereksinimlerinize uyacak şekilde uyarlayabilir, maksimum verimlilik ve etkinlik sağlayabilirsiniz.
Ultralytics YOLO26'nın otopark yönetimindeki bazı gerçek dünya uygulamaları nelerdir?
Ultralytics YOLO26, otopark yönetimi için çeşitli gerçek dünya uygulamalarında kullanılmaktadır, bunlar arasında:
- Otopark Alanı Algılama: Mevcut ve dolu alanları doğru bir şekilde tanımlama.
- Gözetim: Gerçek zamanlı izleme yoluyla güvenliği artırma.
- Trafik Akışı Yönetimi: Verimli trafik yönetimi ile rölanti sürelerini ve tıkanıklığı azaltma. Bu uygulamaları sergileyen görüntüler gerçek dünya uygulamalarında bulunabilir.






