YOLOv7: Eğitilebilir Ücretsiz Avantajlar Paketi
Temmuz 2022'de piyasaya sürülen YOLOv7, piyasaya sürüldüğü dönemde gerçek zamanlı nesne algılamada önemli bir ilerlemeydi. GPU V100 üzerinde %56,8 AP elde ederek tanıtıldığında yeni kıyaslamalar belirledi. YOLOv7, hız ve doğruluk açısından YOLOR, YOLOX, Scaled-YOLOv4 ve YOLOv5 gibi çağdaş nesne algılayıcılarını geride bıraktı. Model, başka hiçbir veri seti veya önceden eğitilmiş ağırlık kullanılmadan MS COCO veri seti üzerinde sıfırdan eğitilmiştir. YOLOv7'nin kaynak kodu GitHub'da mevcuttur. Ancak, YOLO11 ve YOLO26 gibi daha yeni modellerin o zamandan beri geliştirilmiş verimlilikle daha yüksek doğruluk elde ettiğini unutmayın.
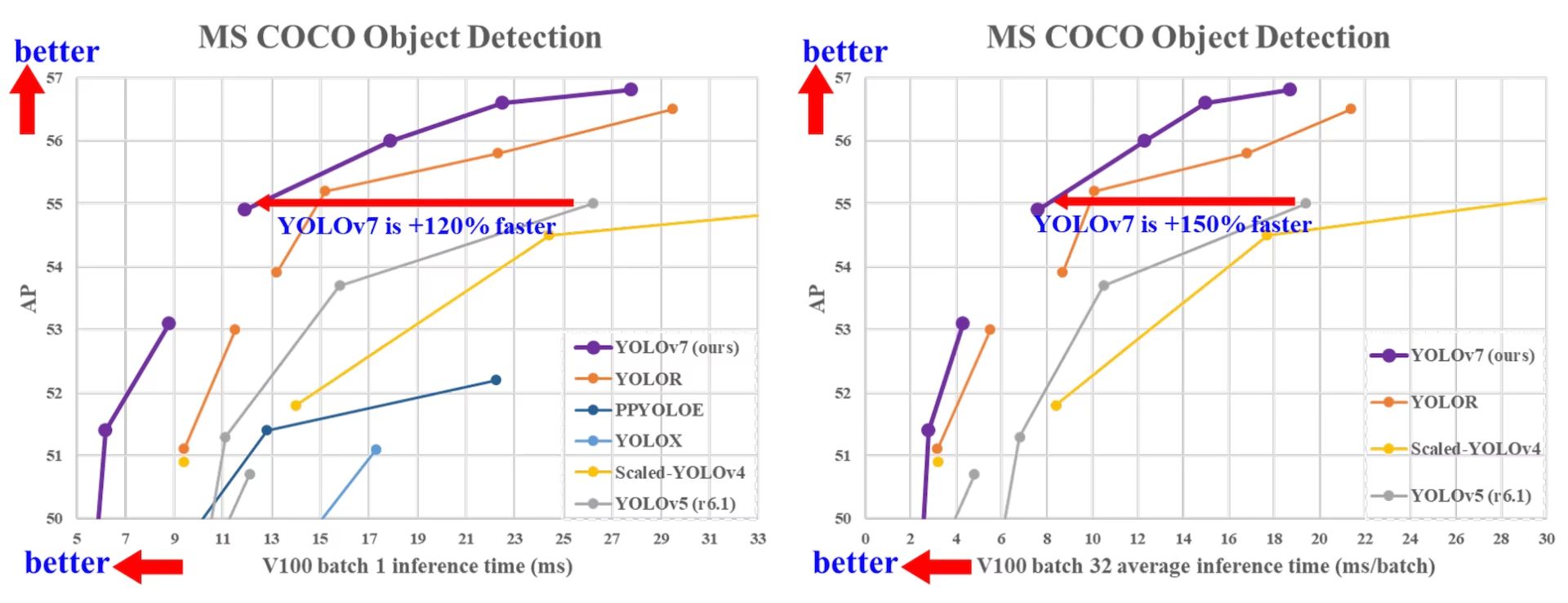
SOTA nesne dedektörlerinin karşılaştırılması
YOLO karşılaştırma tablosundaki sonuçlardan, önerilen yöntemin kapsamlı bir şekilde en iyi hız-doğruluk dengesine sahip olduğunu biliyoruz. YOLOv7-tiny-SiLU'yu YOLOv5-N (r6.1) ile karşılaştırırsak, yöntemimiz 127 fps daha hızlı ve AP'de %10,7 daha doğru. Ek olarak, YOLOv7 161 fps kare hızında %51,4 AP'ye sahipken, aynı AP'ye sahip PPYOLOE-L'nin kare hızı yalnızca 78 fps'dir. Parametre kullanımı açısından YOLOv7, PPYOLOE-L'den %41 daha azdır.
YOLOv7-X'i 114 fps çıkarım hızıyla, 99 fps çıkarım hızına sahip YOLOv5-L (r6.1) ile karşılaştırırsak, YOLOv7-X, AP'yi %3,9 oranında artırabilir. YOLOv7-X, benzer ölçekteki YOLOv5-X (r6.1) ile karşılaştırıldığında, YOLOv7-X'in çıkarım hızı 31 fps daha hızlıdır. Ek olarak, parametre ve hesaplama miktarı açısından, YOLOv7-X, YOLOv5-X (r6.1)'e kıyasla parametreleri %22 ve hesaplamayı %8 azaltırken, AP'yi %2,2 artırır (Kaynak).
Performans
| Model | Parametreler (M) | FLOP'lar (G) | Boyut (piksel) | FPS (Saniyedeki Kare Sayısı) | APtest / val 50-95 | APtest 50 | APtest 75 | APtest S | APtest M | APtest L |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOX-S | 9.0 | 26.8 | 640 | 102 | 40.5% / 40.5% | - | - | - | - | - |
| YOLOX-M | 25.3 | 73.8 | 640 | 81 | 47.2% / 46.9% | - | - | - | - | - |
| YOLOX-L | 54.2 | 155.6 | 640 | 69 | 50.1% / 49.7% | - | - | - | - | - |
| YOLOX-X | 99.1 | 281.9 | 640 | 58 | 51.5% / 51.1% | - | - | - | - | - |
| PPYOLOE-S | 7.9 | 17.4 | 640 | 208 | 43.1% / 42.7% | 60.5% | 46.6% | 23.2% | 46.4% | 56.9% |
| PPYOLOE-M | 23.4 | 49.9 | 640 | 123 | 48.9% / 48.6% | 66.5% | 53.0% | 28.6% | 52.9% | 63.8% |
| PPYOLOE-L | 52.2 | 110.1 | 640 | 78 | 51.4% / 50.9% | 68.9% | 55.6% | 31.4% | 55.3% | 66.1% |
| PPYOLOE-X | 98.4 | 206.6 | 640 | 45 | 52.2% / 51.9% | 69.9% | 56.5% | 33.3% | 56.3% | 66.4% |
| YOLOv5-N (r6.1) | 1.9 | 4.5 | 640 | 159 | - / 28.0% | - | - | - | - | - |
| YOLOv5-S (r6.1) | 7.2 | 16.5 | 640 | 156 | - / 37.4% | - | - | - | - | - |
| YOLOv5-M (r6.1) | 21.2 | 49.0 | 640 | 122 | - / 45.4% | - | - | - | - | - |
| YOLOv5-L (r6.1) | 46.5 | 109.1 | 640 | 99 | - / 49.0% | - | - | - | - | - |
| YOLOv5-X (r6.1) | 86.7 | 205.7 | 640 | 83 | - / %50,7 | - | - | - | - | - |
| YOLOR-CSP | 52.9 | 120.4 | 640 | 106 | 51.1% / 50.8% | 69.6% | 55.7% | 31.7% | 55.3% | 64.7% |
| YOLOR-CSP-X | 96.9 | 226.8 | 640 | 87 | 53.0% / 52.7% | 71.4% | 57.9% | 33.7% | 57.1% | 66.8% |
| YOLOv7-tiny-SiLU | 6.2 | 13.8 | 640 | 286 | 38.7% / 38.7% | 56.7% | 41.7% | 18.8% | 42.4% | 51.9% |
| YOLOv7 | 36.9 | 104.7 | 640 | 161 | 51.4% / 51.2% | 69.7% | 55.9% | 31.8% | 55.5% | 65.0% |
| YOLOv7-X | 71.3 | 189.9 | 640 | 114 | 53.1% / 52.9% | 71.2% | 57.8% | 33.8% | 57.1% | 67.4% |
| YOLOv5-N6 (r6.1) | 3.2 | 18.4 | 1280 | 123 | - / 36.0% | - | - | - | - | - |
| YOLOv5-S6 (r6.1) | 12.6 | 67.2 | 1280 | 122 | - / 44.8% | - | - | - | - | - |
| YOLOv5-M6 (r6.1) | 35.7 | 200.0 | 1280 | 90 | - / 51.3% | - | - | - | - | - |
| YOLOv5-L6 (r6.1) | 76.8 | 445.6 | 1280 | 63 | - / 53.7% | - | - | - | - | - |
| YOLOv5-X6 (r6.1) | 140.7 | 839.2 | 1280 | 38 | - / %55,0 | - | - | - | - | - |
| YOLOR-P6 | 37.2 | 325.6 | 1280 | 76 | 53.9% / 53.5% | 71.4% | 58.9% | 36.1% | 57.7% | 65.6% |
| YOLOR-W6 | 79.8 | 453.2 | 1280 | 66 | 55.2% / 54.8% | 72.7% | 60.5% | 37.7% | 59.1% | 67.1% |
| YOLOR-E6 | 115.8 | 683.2 | 1280 | 45 | 55.8% / 55.7% | 73.4% | 61.1% | 38.4% | 59.7% | 67.7% |
| YOLOR-D6 | 151.7 | 935.6 | 1280 | 34 | 56.5% / 56.1% | 74.1% | 61.9% | 38.9% | 60.4% | 68.7% |
| YOLOv7-W6 | 70.4 | 360.0 | 1280 | 84 | 54.9% / 54.6% | 72.6% | 60.1% | 37.3% | 58.7% | 67.1% |
| YOLOv7-E6 | 97.2 | 515.2 | 1280 | 56 | 56.0% / 55.9% | 73.5% | 61.2% | 38.0% | 59.9% | 68.4% |
| YOLOv7-D6 | 154.7 | 806.8 | 1280 | 44 | 56.6% / 56.3% | 74.0% | 61.8% | 38.8% | 60.1% | 69.5% |
| YOLOv7-E6E | 151.7 | 843.2 | 1280 | 36 | 56.8% / 56.8% | 74.4% | 62.1% | 39.3% | 60.5% | 69.0% |
Genel Bakış
Gerçek zamanlı nesne algılama, çoklu nesne takibi, otonom sürüş, robotik ve tıbbi görüntü analizi dahil olmak üzere birçok bilgisayar görüşü sisteminde önemli bir bileşendir. Son yıllarda, gerçek zamanlı nesne algılama geliştirme çalışmaları, çeşitli CPU'ların, GPU'ların ve sinirsel işlem birimlerinin (NPU'lar) çıkarım hızını iyileştirmeye ve verimli mimariler tasarlamaya odaklanmıştır. YOLOv7, uçtan buluta hem mobil GPU hem de GPU cihazlarını destekler.
Mimari optimizasyonuna odaklanan geleneksel gerçek zamanlı nesne detektörlerinin aksine, YOLOv7 eğitim sürecinin optimizasyonuna odaklanmayı sunar. Bu, çıkarım maliyetini artırmadan nesne tespiti doğruluğunu artırmak için tasarlanmış modüller ve optimizasyon yöntemlerini içerir; bu, "eğitilebilir ücretsiz avantajlar paketi" olarak bilinir.
Temel Özellikler
YOLOv7 çeşitli temel özellikleri sunar:
Model Yeniden Parametreleme: YOLOv7, gradyan yayılım yolu kavramıyla farklı ağlardaki katmanlara uygulanabilen bir strateji olan planlı bir yeniden parametrelendirilmiş model önermektedir.
Dinamik Etiket Atama: Modelin birden çok çıktı katmanıyla eğitilmesi yeni bir sorun ortaya çıkarır: "Farklı dalların çıktıları için dinamik hedefler nasıl atanır?" Bu sorunu çözmek için YOLOv7, kabadan inceye doğru yönlendirilmiş etiket atama adı verilen yeni bir etiket atama yöntemi sunar.
Genişletilmiş ve Bileşik Ölçekleme: YOLOv7, parametreleri ve hesaplamayı etkili bir şekilde kullanabilen gerçek zamanlı nesne dedektörü için "genişletme" ve "bileşik ölçekleme" yöntemleri önermektedir.
Verimlilik: YOLOv7 tarafından önerilen yöntem, en son teknolojiye sahip gerçek zamanlı nesne dedektörünün yaklaşık %40 parametresini ve %50 hesaplamasını etkili bir şekilde azaltabilir ve daha hızlı çıkarım hızına ve daha yüksek detect doğruluğuna sahiptir.
Kullanım Örnekleri
Ultralytics yolov7.pt önceden eğitilmiş ağırlıklar veya ultralytics/cfg/models/v7/ YAML dosyaları ve YOLOv7 için yerel PyTorch ve çıkarım YOLOv7 desteklenmiyor Ultralytics Python YOLOv7 . Bununla birlikte, YOLOv7 kaynak kod YOLOv7 Aşağıda gösterildiği gibi, dosyayı ONNX TensorRT formatına Ultralytics yükleyin.
ONNX Dışa Aktarma
Ultralytics ile YOLOv7 ONNX modelini kullanmak için:
(İsteğe bağlı) Gerekli bağımlılıkların otomatik olarak yüklenmesi için Ultralytics'i kurun ve bir ONNX modeli dışa aktarın:
pip install ultralytics yolo export model=yolo26n.pt format=onnxYOLOv7 deposundaki dışa aktarıcıyı kullanarak istediğiniz YOLOv7 modelini dışa aktarın:
git clone https://github.com/WongKinYiu/yolov7 cd yolov7 python export.py --weights yolov7-tiny.pt --grid --end2end --simplify --topk-all 100 --iou-thres 0.65 --conf-thres 0.35 --img-size 640 640 --max-wh 640Aşağıdaki komut dosyasını kullanarak ONNX model grafiğini Ultralytics ile uyumlu olacak şekilde değiştirin:
import numpy as np import onnx from onnx import helper, numpy_helper # Load the ONNX model model_path = "yolov7/yolov7-tiny.onnx" # Replace with your model path model = onnx.load(model_path) graph = model.graph # Fix input shape to batch size 1 input_shape = graph.input[0].type.tensor_type.shape input_shape.dim[0].dim_value = 1 # Define the output of the original model original_output_name = graph.output[0].name # Create slicing nodes sliced_output_name = f"{original_output_name}_sliced" # Define initializers for slicing (remove the first value) start = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_start") end = numpy_helper.from_array(np.array([7], dtype=np.int64), name="slice_end") axes = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_axes") steps = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_steps") graph.initializer.extend([start, end, axes, steps]) slice_node = helper.make_node( "Slice", inputs=[original_output_name, "slice_start", "slice_end", "slice_axes", "slice_steps"], outputs=[sliced_output_name], name="SliceNode", ) graph.node.append(slice_node) # Define segment slicing seg1_start = numpy_helper.from_array(np.array([0], dtype=np.int64), name="seg1_start") seg1_end = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg1_end") seg2_start = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg2_start") seg2_end = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg2_end") seg3_start = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg3_start") seg3_end = numpy_helper.from_array(np.array([6], dtype=np.int64), name="seg3_end") graph.initializer.extend([seg1_start, seg1_end, seg2_start, seg2_end, seg3_start, seg3_end]) # Create intermediate tensors for segments segment_1_name = f"{sliced_output_name}_segment1" segment_2_name = f"{sliced_output_name}_segment2" segment_3_name = f"{sliced_output_name}_segment3" # Add segment slicing nodes graph.node.extend( [ helper.make_node( "Slice", inputs=[sliced_output_name, "seg1_start", "seg1_end", "slice_axes", "slice_steps"], outputs=[segment_1_name], name="SliceSegment1", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg2_start", "seg2_end", "slice_axes", "slice_steps"], outputs=[segment_2_name], name="SliceSegment2", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg3_start", "seg3_end", "slice_axes", "slice_steps"], outputs=[segment_3_name], name="SliceSegment3", ), ] ) # Concatenate the segments concat_output_name = f"{sliced_output_name}_concat" concat_node = helper.make_node( "Concat", inputs=[segment_1_name, segment_3_name, segment_2_name], outputs=[concat_output_name], axis=1, name="ConcatSwapped", ) graph.node.append(concat_node) # Reshape to [1, -1, 6] reshape_shape = numpy_helper.from_array(np.array([1, -1, 6], dtype=np.int64), name="reshape_shape") graph.initializer.append(reshape_shape) final_output_name = f"{concat_output_name}_batched" reshape_node = helper.make_node( "Reshape", inputs=[concat_output_name, "reshape_shape"], outputs=[final_output_name], name="AddBatchDimension", ) graph.node.append(reshape_node) # Get the shape of the reshaped tensor shape_node_name = f"{final_output_name}_shape" shape_node = helper.make_node( "Shape", inputs=[final_output_name], outputs=[shape_node_name], name="GetShapeDim", ) graph.node.append(shape_node) # Extract the second dimension dim_1_index = numpy_helper.from_array(np.array([1], dtype=np.int64), name="dim_1_index") graph.initializer.append(dim_1_index) second_dim_name = f"{final_output_name}_dim1" gather_node = helper.make_node( "Gather", inputs=[shape_node_name, "dim_1_index"], outputs=[second_dim_name], name="GatherSecondDim", ) graph.node.append(gather_node) # Subtract from 100 to determine how many values to pad target_size = numpy_helper.from_array(np.array([100], dtype=np.int64), name="target_size") graph.initializer.append(target_size) pad_size_name = f"{second_dim_name}_padsize" sub_node = helper.make_node( "Sub", inputs=["target_size", second_dim_name], outputs=[pad_size_name], name="CalculatePadSize", ) graph.node.append(sub_node) # Build the [2, 3] pad array: # 1st row -> [0, 0, 0] (no padding at the start of any dim) # 2nd row -> [0, pad_size, 0] (pad only at the end of the second dim) pad_starts = numpy_helper.from_array(np.array([0, 0, 0], dtype=np.int64), name="pad_starts") graph.initializer.append(pad_starts) zero_scalar = numpy_helper.from_array(np.array([0], dtype=np.int64), name="zero_scalar") graph.initializer.append(zero_scalar) pad_ends_name = "pad_ends" concat_pad_ends_node = helper.make_node( "Concat", inputs=["zero_scalar", pad_size_name, "zero_scalar"], outputs=[pad_ends_name], axis=0, name="ConcatPadEnds", ) graph.node.append(concat_pad_ends_node) pad_values_name = "pad_values" concat_pad_node = helper.make_node( "Concat", inputs=["pad_starts", pad_ends_name], outputs=[pad_values_name], axis=0, name="ConcatPadStartsEnds", ) graph.node.append(concat_pad_node) # Create Pad operator to pad with zeros pad_output_name = f"{final_output_name}_padded" pad_constant_value = numpy_helper.from_array( np.array([0.0], dtype=np.float32), name="pad_constant_value", ) graph.initializer.append(pad_constant_value) pad_node = helper.make_node( "Pad", inputs=[final_output_name, pad_values_name, "pad_constant_value"], outputs=[pad_output_name], mode="constant", name="PadToFixedSize", ) graph.node.append(pad_node) # Update the graph's final output to [1, 100, 6] new_output_type = onnx.helper.make_tensor_type_proto( elem_type=graph.output[0].type.tensor_type.elem_type, shape=[1, 100, 6] ) new_output = onnx.helper.make_value_info(name=pad_output_name, type_proto=new_output_type) # Replace the old output with the new one graph.output.pop() graph.output.extend([new_output]) # Save the modified model onnx.save(model, "yolov7-ultralytics.onnx")Daha sonra değiştirilmiş ONNX modelini yükleyebilir ve Ultralytics'te normal şekilde çıkarım yapabilirsiniz:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.onnx", task="detect") results = model(ASSETS / "bus.jpg")
TensorRT Dışa Aktarma
ONNX Dışa Aktarma bölümündeki 1-2 arasındaki adımları izleyin.
Şunu yükleyin:
TensorRTpython paketi:pip install tensorrtDeğiştirilmiş ONNX modelini TensorRT motoruna dönüştürmek için aşağıdaki betiği çalıştırın:
from ultralytics.utils.export import export_engine export_engine("yolov7-ultralytics.onnx", half=True)Modeli Ultralytics'te yükleyin ve çalıştırın:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.engine", task="detect") results = model(ASSETS / "bus.jpg")
Alıntılar ve Teşekkürler
Gerçek zamanlı nesne tespiti alanındaki önemli katkılarından dolayı YOLOv7 yazarlarına teşekkür etmek isteriz:
@article{wang2022yolov7,
title={YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors},
author={Wang, Chien-Yao and Bochkovskiy, Alexey and Liao, Hong-Yuan Mark},
journal={arXiv preprint arXiv:2207.02696},
year={2022}
}
Orijinal YOLOv7 makalesi arXiv'de bulunabilir. Yazarlar çalışmalarını herkese açık hale getirmiş ve kod tabanına GitHub'dan erişilebilir. Alanı ilerletme ve çalışmalarını daha geniş bir topluluğa erişilebilir kılma çabalarını takdir ediyoruz.
SSS
YOLOv7 nedir ve gerçek zamanlı nesne tespiti alanında neden bir atılım olarak kabul edilir?
Temmuz 2022'de piyasaya sürülen YOLOv7, piyasaya sürüldüğü dönemde mükemmel hız ve doğruluk elde eden önemli bir gerçek zamanlı nesne algılama modeliydi. Parametre kullanımı ve çıkarım hızı açısından YOLOX, YOLOv5 ve PPYOLOE gibi çağdaş modelleri geride bıraktı. YOLOv7'nin ayırt edici özellikleri arasında, çıkarım maliyetlerini artırmadan performansını optimize eden model yeniden parametrelendirmesi ve dinamik etiket ataması yer alır. Mimarisi ve diğer son teknoloji nesne algılayıcılarla karşılaştırma metrikleri hakkında daha fazla teknik ayrıntı için YOLOv7 makalesine bakınız.
YOLOv7, YOLOv4 ve YOLOv5 gibi önceki YOLO modellerini nasıl geliştirir?
YOLOv7, eğitim sürecini geliştiren ve çıkarım doğruluğunu artıran model yeniden parametrelendirme ve dinamik etiket atama gibi çeşitli yenilikler sunar. YOLOv5 ile karşılaştırıldığında, YOLOv7 hızı ve doğruluğu önemli ölçüde artırır. Örneğin, YOLOv7-X, doğruluğu %2,2 artırır ve parametreleri YOLOv5-X'e göre %22 azaltır. Ayrıntılı karşılaştırmalar, SOTA nesne dedektörleri ile YOLOv7 karşılaştırması performans tablosunda bulunabilir.
YOLOv7'yi Ultralytics araçları ve platformlarıyla kullanabilir miyim?
Şu an itibarıyla Ultralytics yalnızca YOLOv7 ONNX ve TensorRT çıkarımını desteklemektedir. YOLOv7'nin Ultralytics ile dışa aktarılmış ONNX ve TensorRT sürümünü çalıştırmak için Kullanım Örnekleri bölümüne bakın.
Veri kümemi kullanarak özel bir YOLOv7 modelini nasıl eğitirim?
Özel bir YOLOv7 modelini kurmak ve eğitmek için şu adımları izleyin:
- YOLOv7 deposunu klonlayın:
git clone https://github.com/WongKinYiu/yolov7 - Klonlanan dizine gidin ve bağımlılıkları yükleyin:
cd yolov7 pip install -r requirements.txt Veri kümenizi hazırlayın ve model parametrelerini, depoda sağlanan kullanım talimatlarına göre yapılandırın. Daha fazla rehberlik için, en son bilgiler ve güncellemeler için YOLOv7 GitHub deposunu ziyaret edin.
Eğitimden sonra, modeli Kullanım Örnekleri'nde gösterildiği gibi Ultralytics'te kullanılmak üzere ONNX veya TensorRT'ye aktarabilirsiniz.
YOLOv7'de tanıtılan temel özellikler ve optimizasyonlar nelerdir?
YOLOv7, gerçek zamanlı nesne algılamada devrim yaratan çeşitli temel özellikler sunar:
- Model Yeniden Parametreleme: Gradyan yayılımı yollarını optimize ederek modelin performansını artırır.
- Dinamik Etiket Atama: Doğruluğu artırmak için farklı dallardaki çıktılar için dinamik hedefler atamak üzere coarse-to-fine lead guided yöntemini kullanır.
- Genişletilmiş ve Bileşik Ölçeklendirme: Modeli çeşitli gerçek zamanlı uygulamalar için ölçeklendirmek üzere parametreleri ve hesaplamayı verimli bir şekilde kullanır.
- Verimlilik: Diğer son teknoloji modellere kıyasla parametre sayısını %40 ve hesaplamayı %50 azaltırken daha hızlı çıkarım hızları elde eder.
Bu özellikler hakkında daha fazla bilgi için YOLOv7'ye Genel Bakış bölümüne bakın.








