Ultralytics YOLOv8'i keşfedin
Genel Bakış
YOLOv8, Ultralytics tarafından 10 Ocak 2023'te piyasaya sürüldü ve doğruluk ile hız açısından son teknoloji performans sunuyor. Önceki YOLO sürümlerinin ilerlemeleri üzerine inşa edilen YOLOv8, geniş bir uygulama yelpazesinde çeşitli nesne detect etme görevleri için onu ideal bir seçim haline getiren yeni özellikler ve optimizasyonlar sundu.
İzle: Ultralytics YOLOv8 Modeline Genel Bakış
Ultralytics Platformu'nda Deneyin
YOLOv8 modellerini doğrudan Ultralytics Platformu üzerinde keşfedin ve çalıştırın.
YOLOv8'in Temel Özellikleri
- Gelişmiş Backbone ve Neck Mimarileri: YOLOv8, gelişmiş özellik çıkarımı ve nesne algılama performansı ile sonuçlanan son teknoloji ürünü backbone ve neck mimarileri kullanır.
- Ankrajsız Bölünmüş Ultralytics Head: YOLOv8, ankraj tabanlı yaklaşımlara kıyasla daha iyi doğruluk ve daha verimli bir algılama sürecine katkıda bulunan, ankraj içermeyen bölünmüş bir Ultralytics head kullanır.
- Optimize Edilmiş Doğruluk-Hız Dengesi: Doğruluk ve hız arasında optimum bir dengeyi korumaya odaklanan YOLOv8, çeşitli uygulama alanlarında gerçek zamanlı nesne algılama görevleri için uygundur.
- Çeşitli Önceden Eğitilmiş Modeller: YOLOv8, çeşitli görevlere ve performans gereksinimlerine hitap etmek için bir dizi önceden eğitilmiş model sunarak, belirli kullanım durumunuz için doğru modeli bulmayı kolaylaştırır.
Desteklenen Görevler ve Modlar
YOLOv8 serisi, her biri bilgisayar görüşünde belirli görevler için uzmanlaşmış çeşitli modeller sunar. Bu modeller, nesne algılamadan örnek segmentasyon, poz/anahtar nokta algılama, yönlendirilmiş nesne algılama ve sınıflandırma gibi daha karmaşık görevlere kadar çeşitli gereksinimleri karşılamak üzere tasarlanmıştır.
YOLOv8 serisinin her bir varyantı, kendi görevine göre optimize edilmiştir ve yüksek performans ve doğruluk sağlar. Ek olarak, bu modeller Çıkarım, Doğrulama, Eğitim ve Dışa Aktarma dahil olmak üzere çeşitli operasyonel modlarla uyumludur ve dağıtım ve geliştirmenin farklı aşamalarında kullanımlarını kolaylaştırır.
| Model | Dosya adları | Görev | Çıkarım | Doğrulama | Eğitim | Dışa aktar |
|---|---|---|---|---|---|---|
| YOLOv8 | yolov8n.pt yolov8s.pt yolov8m.pt yolov8l.pt yolov8x.pt | Algılama | ✅ | ✅ | ✅ | ✅ |
| YOLOv8-seg | yolov8n-seg.pt yolov8s-seg.pt yolov8m-seg.pt yolov8l-seg.pt yolov8x-seg.pt | Örnek Segmentasyonu | ✅ | ✅ | ✅ | ✅ |
| YOLOv8-pose | yolov8n-pose.pt yolov8s-pose.pt yolov8m-pose.pt yolov8l-pose.pt yolov8x-pose.pt yolov8x-pose-p6.pt | Poz/Anahtar Noktaları | ✅ | ✅ | ✅ | ✅ |
| YOLOv8-obb | yolov8n-obb.pt yolov8s-obb.pt yolov8m-obb.pt yolov8l-obb.pt yolov8x-obb.pt | Yönlendirilmiş Algılama | ✅ | ✅ | ✅ | ✅ |
| YOLOv8-cls | yolov8n-cls.pt yolov8s-cls.pt yolov8m-cls.pt yolov8l-cls.pt yolov8x-cls.pt | Sınıflandırma | ✅ | ✅ | ✅ | ✅ |
Bu tablo, YOLOv8 model varyantlarına genel bir bakış sunarak, bunların belirli görevlerdeki uygulanabilirliğini ve Çıkarım, Doğrulama, Eğitim ve Dışa Aktarma gibi çeşitli operasyonel modlarla uyumluluğunu vurgular. YOLOv8 serisinin çok yönlülüğünü ve sağlamlığını sergileyerek, onları bilgisayar görüşü alanındaki çeşitli uygulamalar için uygun hale getirir.
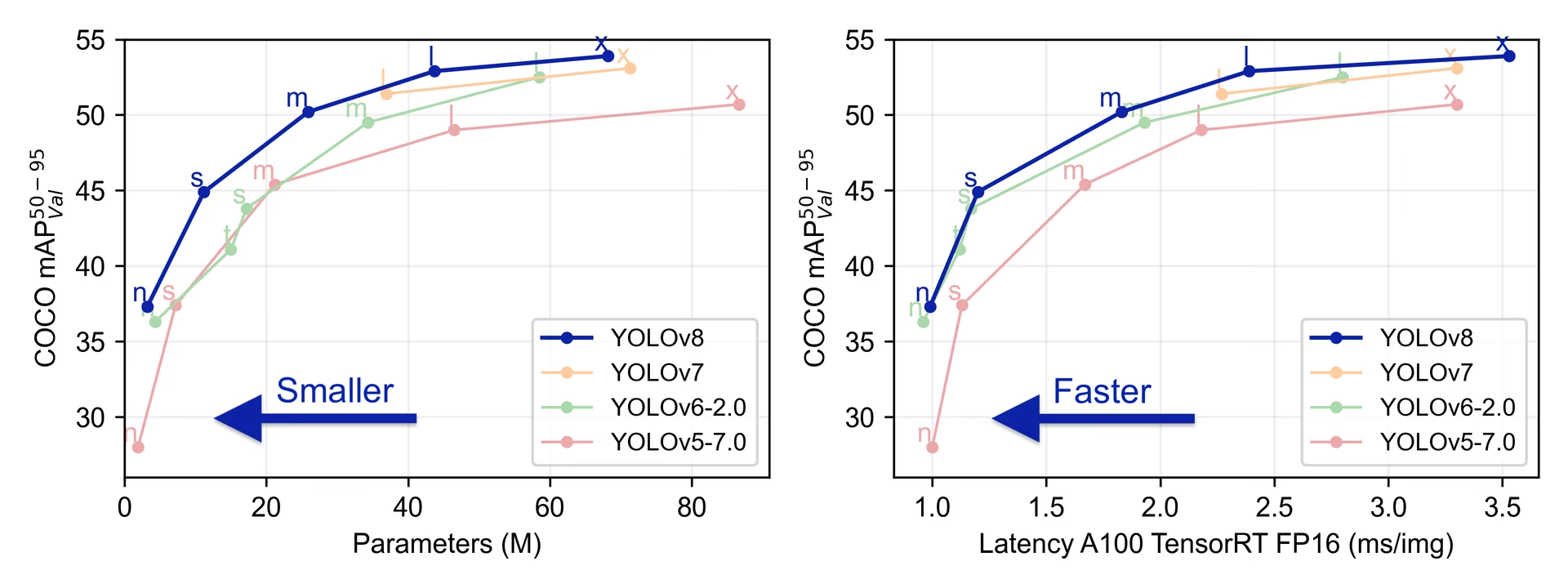
Performans Metrikleri
Performans
Detection Belgeleri'ne bakınız. Bu modeller COCO üzerinde eğitilmiştir ve 80 önceden eğitilmiş sınıf içerir.
| Model | boyut (piksel) | mAPval 50-95 | Hız CPU ONNX (ms) | Hız A100 TensorRT (ms) | parametreler (M) | FLOP'lar (B) |
|---|---|---|---|---|---|---|
| YOLOv8n | 640 | 37.3 | 80.4 | 0.99 | 3.2 | 8.7 |
| YOLOv8s | 640 | 44.9 | 128.4 | 1.20 | 11.2 | 28.6 |
| YOLOv8m | 640 | 50.2 | 234.7 | 1.83 | 25.9 | 78.9 |
| YOLOv8l | 640 | 52.9 | 375.2 | 2.39 | 43.7 | 165.2 |
| YOLOv8x | 640 | 53.9 | 479.1 | 3.53 | 68.2 | 257.8 |
Open Image V7 üzerinde eğitilmiş ve 600 önceden eğitilmiş sınıf içeren bu modellerle kullanım örnekleri için Detection Belgelerine bakın.
| Model | boyut (piksel) | mAPval 50-95 | Hız CPU ONNX (ms) | Hız A100 TensorRT (ms) | parametreler (M) | FLOP'lar (B) |
|---|---|---|---|---|---|---|
| YOLOv8n | 640 | 18.4 | 142.4 | 1.21 | 3.5 | 10.5 |
| YOLOv8s | 640 | 27.7 | 183.1 | 1.40 | 11.4 | 29.7 |
| YOLOv8m | 640 | 33.6 | 408.5 | 2.26 | 26.2 | 80.6 |
| YOLOv8l | 640 | 34.9 | 596.9 | 2.43 | 44.1 | 167.4 |
| YOLOv8x | 640 | 36.3 | 860.6 | 3.56 | 68.7 | 260.6 |
Segmentation Belgeleri'ne bakınız. Bu modeller COCO üzerinde eğitilmiştir ve 80 önceden eğitilmiş sınıf içerir.
| Model | boyut (piksel) | mAPbox 50-95 | mAPmask 50-95 | Hız CPU ONNX (ms) | Hız A100 TensorRT (ms) | parametreler (M) | FLOP'lar (B) |
|---|---|---|---|---|---|---|---|
| YOLOv8n-seg | 640 | 36.7 | 30.5 | 96.1 | 1.21 | 3.4 | 12.6 |
| YOLOv8s-seg | 640 | 44.6 | 36.8 | 155.7 | 1.47 | 11.8 | 42.6 |
| YOLOv8m-seg | 640 | 49.9 | 40.8 | 317.0 | 2.18 | 27.3 | 110.2 |
| YOLOv8l-seg | 640 | 52.3 | 42.6 | 572.4 | 2.79 | 46.0 | 220.5 |
| YOLOv8x-seg | 640 | 53.4 | 43.4 | 712.1 | 4.02 | 71.8 | 344.1 |
Classification Belgeleri'ne bakınız. Bu modeller ImageNet üzerinde eğitilmiştir ve 1000 önceden eğitilmiş sınıf içerir.
| Model | boyut (piksel) | acc top1 | acc top5 | Hız CPU ONNX (ms) | Hız A100 TensorRT (ms) | parametreler (M) | FLOP'lar (Milyar) - 224 |
|---|---|---|---|---|---|---|---|
| YOLOv8n-cls | 224 | 69.0 | 88.3 | 12.9 | 0.31 | 2.7 | 0.5 |
| YOLOv8s-cls | 224 | 73.8 | 91.7 | 23.4 | 0.35 | 6.4 | 1.7 |
| YOLOv8m-cls | 224 | 76.8 | 93.5 | 85.4 | 0.62 | 17.0 | 5.3 |
| YOLOv8l-cls | 224 | 76.8 | 93.5 | 163.0 | 0.87 | 37.5 | 12.3 |
| YOLOv8x-cls | 224 | 79.0 | 94.6 | 232.0 | 1.01 | 57.4 | 19.0 |
Pose Estimation Belgeleri'ne bakınız. Bu modeller COCO üzerinde eğitilmiştir ve 'kişi' olmak üzere 1 önceden eğitilmiş sınıf içerir.
| Model | boyut (piksel) | mAPpose 50-95 | mAPpose 50 | Hız CPU ONNX (ms) | Hız A100 TensorRT (ms) | parametreler (M) | FLOP'lar (B) |
|---|---|---|---|---|---|---|---|
| YOLOv8n-pose | 640 | 50.4 | 80.1 | 131.8 | 1.18 | 3.3 | 9.2 |
| YOLOv8s-pose | 640 | 60.0 | 86.2 | 233.2 | 1.42 | 11.6 | 30.2 |
| YOLOv8m-pose | 640 | 65.0 | 88.8 | 456.3 | 2.00 | 26.4 | 81.0 |
| YOLOv8l-pose | 640 | 67.6 | 90.0 | 784.5 | 2.59 | 44.4 | 168.6 |
| YOLOv8x-pose | 640 | 69.2 | 90.2 | 1607.1 | 3.73 | 69.4 | 263.2 |
| YOLOv8x-pose-p6 | 1280 | 71.6 | 91.2 | 4088.7 | 10.04 | 99.1 | 1066.4 |
Oriented Detection Belgeleri'ne bakınız. Bu modeller DOTAv1 üzerinde eğitilmiştir ve 15 önceden eğitilmiş sınıf içerir.
| Model | boyut (piksel) | mAPtest 50 | Hız CPU ONNX (ms) | Hız A100 TensorRT (ms) | parametreler (M) | FLOP'lar (B) |
|---|---|---|---|---|---|---|
| YOLOv8n-obb | 1024 | 78.0 | 204.77 | 3.57 | 3.1 | 23.3 |
| YOLOv8s-obb | 1024 | 79.5 | 424.88 | 4.07 | 11.4 | 76.3 |
| YOLOv8m-obb | 1024 | 80.5 | 763.48 | 7.61 | 26.4 | 208.6 |
| YOLOv8l-obb | 1024 | 80.7 | 1278.42 | 11.83 | 44.5 | 433.8 |
| YOLOv8x-obb | 1024 | 81.36 | 1759.10 | 13.23 | 69.5 | 676.7 |
YOLOv8 Kullanım Örnekleri
Bu örnek, basit YOLOv8 eğitim ve çıkarım örnekleri sunmaktadır. Bunlar ve diğer modlar için tam belgelere Tahmin, Eğitim, Doğrulama ve Dışa Aktarma belge sayfalarından ulaşabilirsiniz.
Aşağıdaki örneğin, nesne algılama için YOLOv8 Algılama modelleri için olduğuna dikkat edin. Ek desteklenen görevler için Segmentasyon, Sınıflandırma, OBB dokümanlarına ve Poz dokümanlarına bakın.
Örnek
PyTorch önceden eğitilmiş *.pt modellerin yanı sıra yapılandırma *.yaml dosyaları YOLO() python'da bir model örneği oluşturmak için sınıfa geçirilebilir:
from ultralytics import YOLO
# Load a COCO-pretrained YOLOv8n model
model = YOLO("yolov8n.pt")
# Display model information (optional)
model.info()
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLOv8n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")
Modelleri doğrudan çalıştırmak için CLI komutları mevcuttur:
# Load a COCO-pretrained YOLOv8n model and train it on the COCO8 example dataset for 100 epochs
yolo train model=yolov8n.pt data=coco8.yaml epochs=100 imgsz=640
# Load a COCO-pretrained YOLOv8n model and run inference on the 'bus.jpg' image
yolo predict model=yolov8n.pt source=path/to/bus.jpg
Alıntılar ve Teşekkürler
Ultralytics YOLOv8 Yayını
Ultralytics, modellerin hızla gelişen yapısı nedeniyle YOLOv8 için resmi bir araştırma makalesi yayınlamadı. Statik dokümantasyon üretmek yerine, teknolojiyi geliştirmeye ve kullanımını kolaylaştırmaya odaklanıyoruz. YOLO mimarisi, özellikleri ve kullanımı hakkında en güncel bilgiler için lütfen GitHub depomuza ve dokümantasyonumuza bakın.
Çalışmanızda YOLOv8 modelini veya bu depodaki başka bir yazılımı kullanırsanız, lütfen aşağıdaki formatı kullanarak atıfta bulunun:
@software{yolov8_ultralytics,
author = {Glenn Jocher and Ayush Chaurasia and Jing Qiu},
title = {Ultralytics YOLOv8},
version = {8.0.0},
year = {2023},
url = {https://github.com/ultralytics/ultralytics},
orcid = {0000-0001-5950-6979, 0000-0002-7603-6750, 0000-0003-3783-7069},
license = {AGPL-3.0}
}
Lütfen DOI'nin beklemede olduğunu ve kullanılabilir olduğunda alıntıya ekleneceğini unutmayın. YOLOv8 modelleri AGPL-3.0 ve Kurumsal lisanslar altında sağlanmaktadır.
SSS
YOLOv8 nedir ve önceki YOLO sürümlerinden nasıl farklıdır?
YOLOv8, gelişmiş özelliklerle gerçek zamanlı nesne algılama performansını iyileştirmek için tasarlanmıştır. Önceki sürümlerden farklı olarak YOLOv8, bir anchor-free bölünmüş Ultralytics başlığı, son teknoloji ürünü backbone ve neck mimarilerini içerir ve optimize edilmiş doğruluk-hız dengesi sunarak çeşitli uygulamalar için idealdir. Daha fazla ayrıntı için Genel Bakış ve Temel Özellikler bölümlerine bakın.
YOLOv8'i farklı bilgisayar görüşü görevleri için nasıl kullanabilirim?
YOLOv8, nesne tespiti, örnek segmentasyonu, poz/anahtar nokta tespiti, yönlendirilmiş nesne tespiti ve sınıflandırma dahil olmak üzere çok çeşitli bilgisayarlı görü görevlerini destekler. Her model varyantı, kendi özel görevi için optimize edilmiştir ve Çıkarım, Doğrulama, Eğitim ve Dışa Aktarma gibi çeşitli çalışma modlarıyla uyumludur. Daha fazla bilgi için Desteklenen Görevler ve Modlar bölümüne bakın.
YOLOv8 modelleri için performans metrikleri nelerdir?
YOLOv8 modelleri, çeşitli kıyaslama veri kümelerinde en son teknoloji performansına ulaşır. Örneğin, YOLOv8n modeli COCO veri kümesinde 37.3 mAP (ortalama Hassasiyet) ve A100 TensorRT'de 0.99 ms hıza ulaşır. Farklı görevler ve veri kümeleri genelinde her model varyantı için ayrıntılı performans ölçümlerine Performans Ölçümleri bölümünden ulaşılabilir.
Bir YOLOv8 modeli nasıl eğitirim?
Bir YOLOv8 modelini eğitmek Python veya CLI kullanılarak yapılabilir. Aşağıda, COCO8 veri kümesinde 100 epok için COCO önceden eğitilmiş bir YOLOv8 modeli kullanılarak bir modelin nasıl eğitileceğine dair örnekler verilmiştir:
Örnek
from ultralytics import YOLO
# Load a COCO-pretrained YOLOv8n model
model = YOLO("yolov8n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
yolo train model=yolov8n.pt data=coco8.yaml epochs=100 imgsz=640
Daha fazla ayrıntı için Eğitim belgelerini ziyaret edin.
YOLOv8 modellerini performans açısından kıyaslayabilir miyim?
Evet, YOLOv8 modelleri, çeşitli dışa aktarma formatlarında hız ve doğruluk açısından performans açısından kıyaslanabilir. Kıyaslama için PyTorch, ONNX, TensorRT ve daha fazlasını kullanabilirsiniz. Aşağıda, python ve CLI kullanılarak kıyaslama için örnek komutlar verilmiştir:
Örnek
from ultralytics.utils.benchmarks import benchmark
# Benchmark on GPU
benchmark(model="yolov8n.pt", data="coco8.yaml", imgsz=640, half=False, device=0)
yolo benchmark model=yolov8n.pt data='coco8.yaml' imgsz=640 half=False device=0
Ek bilgiler için Performans Metrikleri bölümünü inceleyin.










