Link to this sectionBộ dữ liệu KITTI#
![]()
Tập dữ liệu Ultralytics KITTI là tập dữ liệu object detection 2D dành cho xe tự lái, chứa 7.481 hình ảnh có chú thích (5.985 ảnh để huấn luyện và 1.496 ảnh để xác thực) trải dài trên 8 lớp — car, van, truck, pedestrian, person_sitting, cyclist, tram và misc. Được công bố bởi Viện Công nghệ Karlsruhe và Viện Công nghệ Toyota tại Chicago, các hình ảnh của tập dữ liệu này được lấy từ các bối cảnh lái xe thực tế trong đô thị, nông thôn và đường cao tốc.
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
Bộ KITTI Vision Benchmark Suite rộng lớn hơn cũng bao gồm các tác vụ ước tính độ sâu, luồng quang học, thị giác âm thanh nổi và đo thị giác, nhưng cấu hình kitti.yaml của Ultralytics tại đây được thiết lập cho 2D object detection và hoàn toàn tương thích với Ultralytics YOLO26.
Link to this sectionCấu trúc tập dữ liệu#
Tập dữ liệu kiểm thử KITTI gốc đã bị loại bỏ ở đây vì không có chú thích ground-truth công khai.
Tập dữ liệu chứa 7.481 hình ảnh có chú thích bao gồm các đối tượng như ô tô, người đi bộ và người đi xe đạp, được chia thành hai tập con được xác định trước bởi cấu hình kitti.yaml:
| Split | Hình ảnh | Mô tả |
|---|---|---|
| Huấn luyện (Train) | 5.985 | Hình ảnh được gán nhãn cho việc huấn luyện model |
| Validation | 1.496 | Hình ảnh tách biệt để đánh giá và đo lường hiệu suất |
Link to this sectionCác lớp vật thể#
Tệp kitti.yaml xác định 8 lớp đối tượng bao gồm phương tiện, con người và những người tham gia giao thông khác thường thấy trong các bối cảnh lái xe:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this sectionỨng dụng#
Tập dữ liệu KITTI hỗ trợ một loạt các ứng dụng phát hiện 2D trong xe tự lái và robotics:
- Nhận thức xe tự lái: Huấn luyện các model để phát hiện và theo dõi ô tô, người đi bộ và người đi xe đạp để các hệ thống tự lái có thể điều hướng an toàn.
- Phát triển ADAS: Xây dựng các tính năng hỗ trợ lái xe như cảnh báo va chạm và phát hiện người đi bộ dựa trên thước phim lái xe thực tế.
- Phân tích giao thông và hiện trường đường bộ: Phát hiện và đếm số lượng phương tiện cũng như người tham gia giao thông để nghiên cứu lưu lượng giao thông và an toàn đường bộ.
- Đánh giá thị giác máy tính: Sử dụng KITTI làm chuẩn mực để đánh giá các model object detection và tracking 2D.
Để gán nhãn cho hình ảnh lái xe của riêng bạn, huấn luyện và quản lý các phiên bản tập dữ liệu trong trình duyệt, hãy chạy quy trình làm việc đầy đủ với Ultralytics Platform.
Link to this sectionYAML tập dữ liệu#
Ultralytics xác định cấu hình tập dữ liệu KITTI bằng cách sử dụng một tệp YAML. Tệp này chỉ định các đường dẫn tập dữ liệu, nhãn lớp và siêu dữ liệu cần thiết cho việc huấn luyện. Tệp cấu hình có sẵn tại https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this sectionCách sử dụng#
Để huấn luyện model YOLO26n trên tập dữ liệu KITTI trong 100 epoch với kích thước hình ảnh là 640, hãy sử dụng các lệnh sau. Tập dữ liệu (390.5 MB) sẽ tự động tải xuống trong lần sử dụng đầu tiên. Để biết thêm chi tiết, hãy tham khảo trang Training.
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)Bạn cũng có thể thực hiện đánh giá, suy luận (inference) và các tác vụ xuất (export) trực tiếp từ dòng lệnh hoặc API Python bằng cách sử dụng cùng một tệp cấu hình.
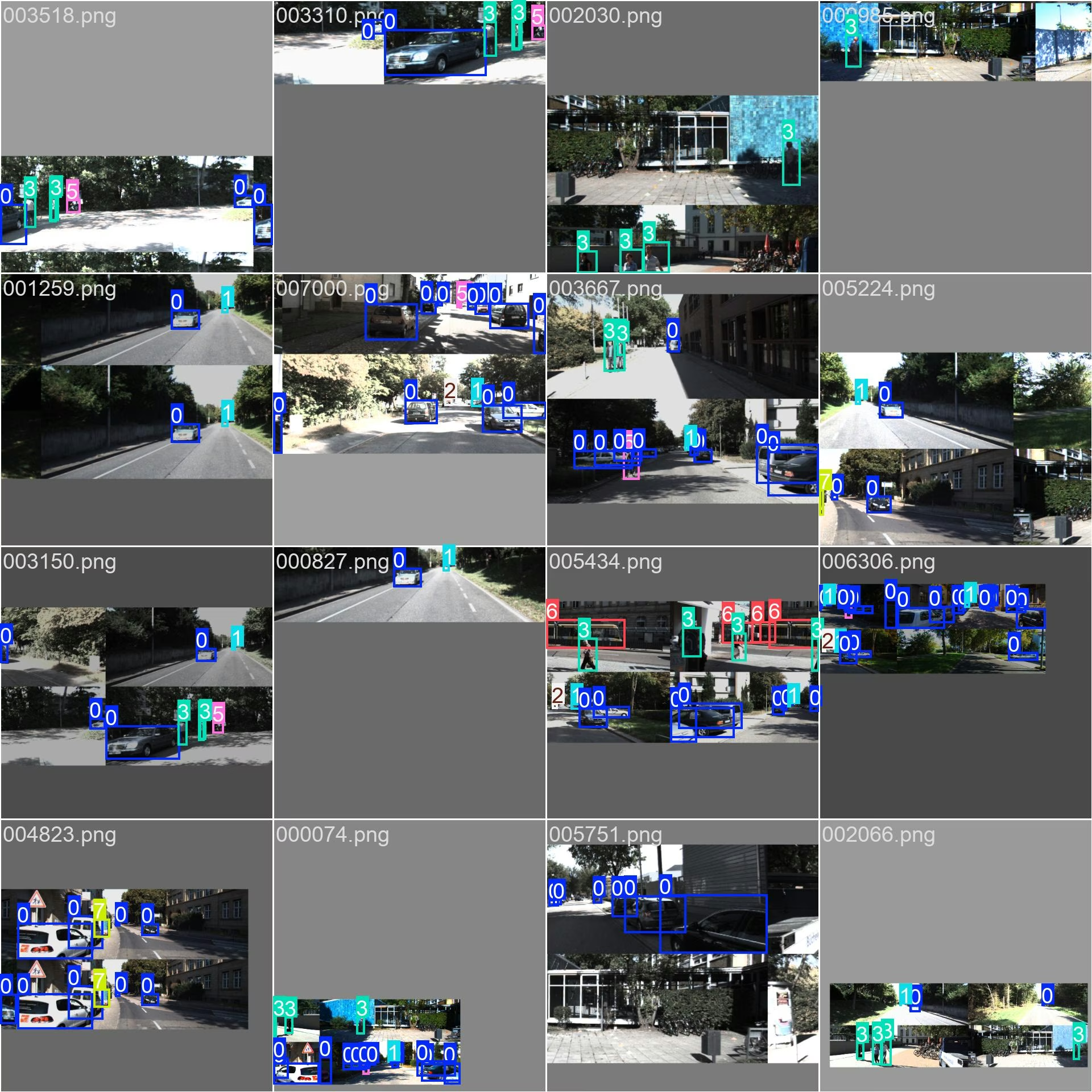
Link to this sectionHình ảnh mẫu và chú thích#
Mẫu dưới đây hiển thị một bối cảnh lái xe từ tập dữ liệu cùng với các chú thích bounding-box 2D của nó. Hình ảnh KITTI trải dài trên các bối cảnh đô thị, nông thôn và đường cao tốc được ghi lại trong giao thông thực tế, mang đến cho các model sự đa dạng về quy mô đối tượng, góc nhìn và ánh sáng.
Link to this sectionTrích dẫn và Ghi nhận#
Nếu bạn sử dụng tập dữ liệu KITTI trong nghiên cứu của mình, vui lòng trích dẫn bài báo sau:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}Chúng tôi cảm ơn KITTI Vision Benchmark Suite đã cung cấp tập dữ liệu toàn diện này, vốn tiếp tục định hình sự tiến bộ trong thị giác máy tính, robotics và các hệ thống tự lái. Truy cập trang web KITTI để biết thêm thông tin.
Link to this sectionCâu hỏi thường gặp#
Link to this sectionTập dữ liệu KITTI được dùng để làm gì?#
Tập dữ liệu Ultralytics KITTI được sử dụng để huấn luyện và đánh giá các model 2D object detection cho xe tự lái. Nó cung cấp 7.481 hình ảnh có chú thích trên 8 lớp, bao gồm ô tô, người đi bộ và người đi xe đạp, và được sử dụng rộng rãi để đánh giá các model nhận thức.
Link to this sectionTập dữ liệu KITTI có bao nhiêu hình ảnh và lớp?#
Cấu hình Ultralytics KITTI chứa 7.481 hình ảnh — 5.985 để huấn luyện và 1.496 để xác thực — mà không có tập kiểm thử tách biệt. Mỗi hình ảnh được chú thích trên 8 lớp: car, van, truck, pedestrian, person_sitting, cyclist, tram và misc.
Link to this sectionTập dữ liệu KITTI có bao gồm tập kiểm thử không?#
Không. Cấu hình Ultralytics KITTI chỉ cung cấp các tập huấn luyện (5.985 hình ảnh) và xác thực (1.496 hình ảnh). Tập dữ liệu kiểm thử KITTI gốc đã bị loại bỏ vì không có chú thích ground-truth công khai.
Link to this sectionLàm thế nào để tôi tải xuống tập dữ liệu KITTI?#
Tập dữ liệu (390.5 MB) sẽ tự động tải xuống vào lần đầu tiên bạn huấn luyện với data="kitti.yaml" — không cần bước thủ công nào cả. Ultralytics sẽ tìm nạp hình ảnh và nhãn rồi giải nén chúng vào thư mục tập dữ liệu cục bộ của bạn. Bạn có thể duyệt qua các tập dữ liệu liên quan trong tổng quan về tập dữ liệu phát hiện.
Link to this sectionTôi có thể huấn luyện các model Ultralytics YOLO26 bằng tập dữ liệu KITTI không?#
Có, KITTI hoàn toàn tương thích với Ultralytics YOLO26. Bạn có thể huấn luyện và xác thực các model trực tiếp bằng tệp cấu hình YAML được cung cấp.
Link to this sectionTôi có thể tìm thấy tệp cấu hình tập dữ liệu KITTI ở đâu?#
Bạn có thể truy cập tệp kitti.yaml tại https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml. Nó xác định các đường dẫn tập dữ liệu và 8 tên lớp được sử dụng để huấn luyện.