Link to this sectionUltralytics YOLO11#
Link to this section概述#
YOLO11 由 Ultralytics 于 2024 年 9 月 10 日发布,提供了出色的 准确率、速度和效率。YOLO11 在此前各版本 YOLO 的显著进步基础上,在架构和训练方法上进行了重大改进,使其成为处理多种 计算机视觉 任务的通用选择。有关具有端到端无 NMS 推理及优化边缘部署功能的最新 Ultralytics 模型,请参阅 YOLO26。
Ultralytics YOLO11 🚀 Podcast generated by NotebookLM
Watch: How to Use Ultralytics YOLO11 for Object Detection and Tracking | How to Benchmark | YOLO11 RELEASED🚀
直接在 Ultralytics Platform 上探索并运行 YOLO11 模型。
Link to this section主要特性#
- 增强的特征提取: YOLO11 采用了改进的 主干网络 和颈部架构,增强了 特征提取 能力,从而实现更精准的目标检测和更复杂的任务表现。
- 针对效率和速度进行优化: YOLO11 引入了精简的架构设计和优化的训练管线,在保持准确性和性能之间最佳平衡的同时,提供了更快的处理速度。
- 以更少参数获得更高准确率: 得益于模型设计的进步,YOLO11m 在 COCO 数据集上实现了更高的 平均精度均值 (mAP),同时比 YOLOv8m 减少了 22% 的参数,在不牺牲准确性的前提下实现了计算高效。
- 跨环境的适应性: YOLO11 可以无缝部署在各种环境中,包括边缘设备、云平台以及支持 NVIDIA GPU 的系统,确保了最大的灵活性。
- 广泛的支持任务: 无论是目标检测、实例分割、图像分类、姿态估计,还是旋转目标检测 (OBB),YOLO11 旨在满足各类计算机视觉挑战。
Link to this section支持的任务和模式#
YOLO11 在早期 Ultralytics YOLO 版本建立的多功能模型范围基础上进行了扩展,为各种计算机视觉任务提供了增强支持:
| 模型 | 文件名 | 任务 | 推理 | 验证 | 训练 | 导出 |
|---|---|---|---|---|---|---|
| YOLO11 | yolo11n.pt yolo11s.pt yolo11m.pt yolo11l.pt yolo11x.pt | 检测 | ✅ | ✅ | ✅ | ✅ |
| YOLO11-seg | yolo11n-seg.pt yolo11s-seg.pt yolo11m-seg.pt yolo11l-seg.pt yolo11x-seg.pt | 实例分割 | ✅ | ✅ | ✅ | ✅ |
| YOLO11-pose | yolo11n-pose.pt yolo11s-pose.pt yolo11m-pose.pt yolo11l-pose.pt yolo11x-pose.pt | 姿态/关键点 | ✅ | ✅ | ✅ | ✅ |
| YOLO11-obb | yolo11n-obb.pt yolo11s-obb.pt yolo11m-obb.pt yolo11l-obb.pt yolo11x-obb.pt | 定向检测 | ✅ | ✅ | ✅ | ✅ |
| YOLO11-cls | yolo11n-cls.pt yolo11s-cls.pt yolo11m-cls.pt yolo11l-cls.pt yolo11x-cls.pt | 分类 | ✅ | ✅ | ✅ | ✅ |
此表概述了 YOLO11 模型变体,展示了它们在特定任务中的适用性以及与推理、验证、训练和导出等操作模式的兼容性。这种灵活性使 YOLO11 适用于从实时检测到复杂分割任务的广泛计算机视觉应用。
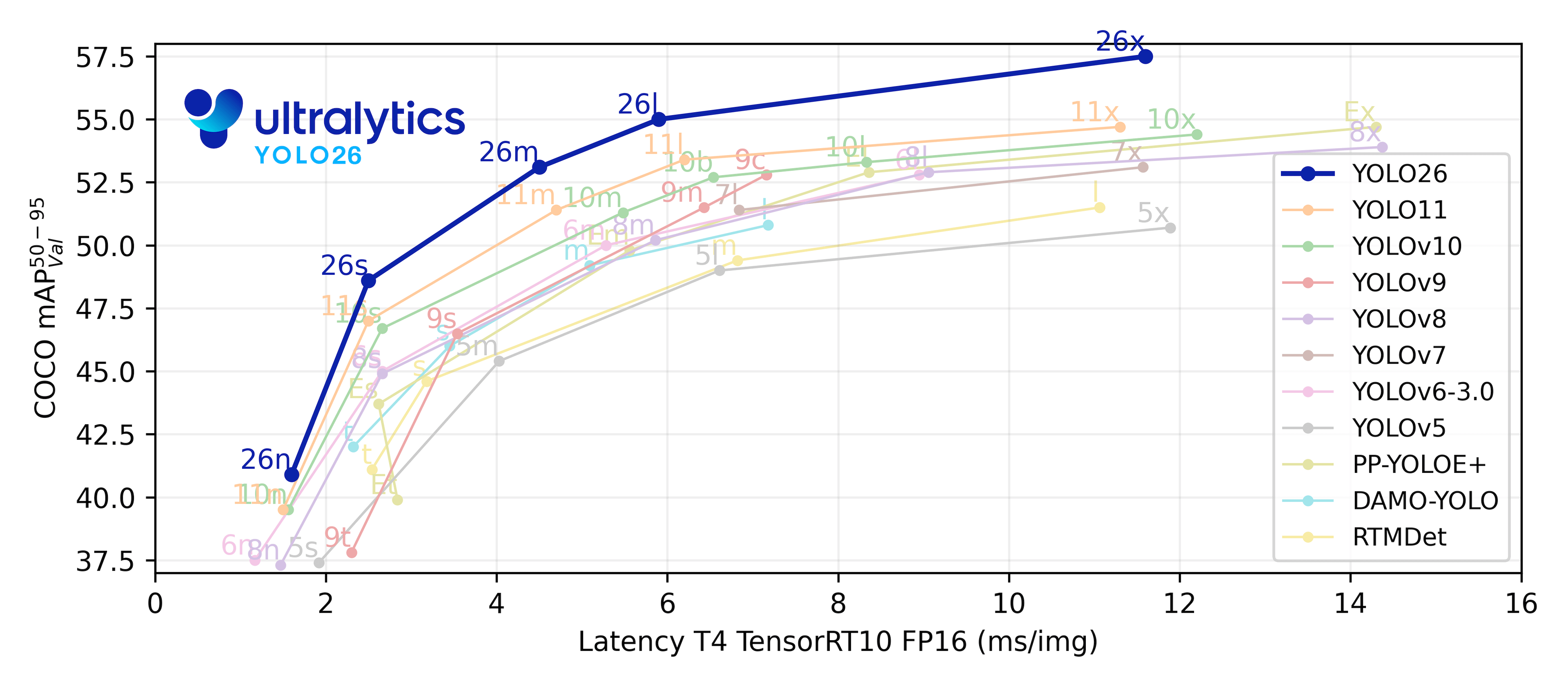
Link to this section性能指标#
Link to this section使用示例#
本节提供简单的 YOLO11 训练和推理示例。有关这些模式及其他 模式 的完整文档,请参阅 预测、训练、验证 和 导出 文档页面。
请注意,以下示例适用于 YOLO11 检测 模型,用于 目标检测。有关其他受支持的任务,请参阅 分割、分类、OBB 和 姿态估计 文档。
PyTorch 预训练的 *.pt 模型以及配置文件 *.yaml 均可传递给 YOLO() 类,从而在 Python 中创建模型实例:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLO11n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")Link to this section引用与致谢#
由于模型的快速演进,Ultralytics 并未针对 YOLO11 发布正式的研究论文。我们专注于推动技术进步并使其更易于使用,而不是制作静态文档。有关 YOLO 架构、功能和用法的最新信息,请参阅我们的 GitHub 存储库 和 文档。
如果你在工作中使用 YOLO11 或本存储库中的任何其他软件,请使用以下格式进行引用:
@software{yolo11_ultralytics,
author = {Glenn Jocher and Jing Qiu},
title = {Ultralytics YOLO11},
version = {11.0.0},
year = {2024},
url = {https://github.com/ultralytics/ultralytics},
orcid = {0000-0001-5950-6979, 0000-0003-3783-7069},
license = {AGPL-3.0}
}请注意,DOI 尚在申请中,一旦可用,将添加到引用中。YOLO11 模型在 AGPL-3.0 和 企业版 许可下提供。
Link to this section常见问题解答#
Link to this section与 YOLOv8 相比,Ultralytics YOLO11 有哪些关键改进?#
相比 YOLOv8,Ultralytics YOLO11 引入了多项重大改进。关键改进包括:
- 增强的特征提取: YOLO11 采用了改进的主干和颈部架构,增强了 特征提取 能力,从而实现更精确的目标检测。
- 优化了效率和速度: 精细的架构设计和优化的训练流程提供了更快的处理速度,同时保持了精度和性能之间的平衡。
- 在更少参数下实现更高精度: 与 YOLOv8m 相比,YOLO11m 在 COCO 数据集上实现了更高的平均 精度 (mAP),且参数减少了 22%,使其在不牺牲精度的情况下更具计算效率。
- 跨环境的适应性: YOLO11 可部署在各种环境中,包括边缘设备、云平台以及支持 NVIDIA GPU 的系统。
- 广泛的支持任务: YOLO11 支持多种计算机视觉任务,例如目标检测、实例分割、图像分类、姿态估计和旋转目标检测 (OBB)。
Link to this section如何训练用于目标检测的 YOLO11 模型?#
可以使用 Python 或 CLI 命令训练用于目标检测的 YOLO11 模型。以下是这两种方法的示例:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)有关更详细的说明,请参阅 训练 文档。
Link to this sectionYOLO11 模型可以执行哪些任务?#
YOLO11 模型功能多样,支持广泛的计算机视觉任务,包括:
- 目标检测: 在图像中识别和定位对象。
- 实例分割: 检测对象并描绘其边界。
- 图像分类: 将图像分类为预定义的类别。
- 姿态估计: 检测和跟踪人体上的关键点。
- 旋转目标检测 (OBB): 通过旋转检测对象以获得更高的精度。
有关每项任务的更多信息,请参阅 检测、实例分割、分类、姿态估计 和 旋转检测 文档。
Link to this sectionYOLO11 如何在参数更少的情况下实现更高的精度?#
YOLO11 通过模型设计和优化技术的进步,在参数更少的情况下实现了更高的精度。改进的架构实现了高效的特征提取和处理,使其在类似 COCO 的数据集上实现了更高的平均精度 (mAP),同时比 YOLOv8m 减少了 22% 的参数。这使得 YOLO11 在不牺牲精度的情况下提高了计算效率,从而适用于资源受限的设备部署。
Link to this sectionYOLO11 可以部署在边缘设备上吗?#
是的,YOLO11 专为各种环境下的适应性而设计,包括边缘设备。其优化的架构和高效的处理能力使其适用于边缘设备、云平台以及支持 NVIDIA GPU 的系统。这种灵活性确保了 YOLO11 可以应用于多种场景,从移动设备上的实时检测到云环境中的复杂分割任务。有关部署选项的更多详细信息,请参阅 导出 文档。