Parkplatzmanagement mit Ultralytics YOLO26 🚀
Was ist ein Parkraummanagementsystem?
Das Parkraummanagement mit Ultralytics YOLO26 gewährleistet effizientes und sicheres Parken durch die Organisation von Stellplätzen und die Überwachung der Verfügbarkeit. YOLO26 kann das Parkplatzmanagement durch Echtzeit-Fahrzeugerkennung und Einblicke in die Parkplatzbelegung verbessern.
Ansehen: So erstellen Sie ein Parkplatzverwaltungssystem mit Ultralytics | Echtzeit-Erkennung von Parkplätzen 🚗
Vorteile eines Parkraummanagementsystems
- Effizienz: Das Parkplatzmanagement optimiert die Nutzung von Parkplätzen und reduziert Staus.
- Sicherheit und Schutz: Das Parkraummanagement mit YOLO26 verbessert die Sicherheit von Personen und Fahrzeugen durch Überwachungs- und Sicherheitsmaßnahmen.
- Reduzierte Emissionen: Das Parkraummanagement mit YOLO26 steuert den Verkehrsfluss, um Leerlaufzeiten und Emissionen auf Parkplätzen zu minimieren.
Anwendungen in der realen Welt
| Parkraummanagementsystem | Parkraummanagementsystem |
|---|---|
 |  |
| Parkraummanagement-Luftaufnahme mit Ultralytics YOLO26 | Parkraummanagement-Draufsicht mit Ultralytics YOLO26 |
Code-Workflow für das Parkraummanagementsystem
Punktauswahl ist jetzt einfach
Die Auswahl von Parkpunkten ist eine kritische und komplexe Aufgabe in Parkmanagementsystemen. Ultralytics rationalisiert diesen Prozess durch die Bereitstellung eines Tools "Parking slots annotator", mit dem Sie Parkplatzbereiche definieren können, die später für die weitere Verarbeitung verwendet werden können.
Schritt 1: Erfassen Sie einen Frame aus dem Video- oder Kamerastream, in dem Sie den Parkplatz verwalten möchten.
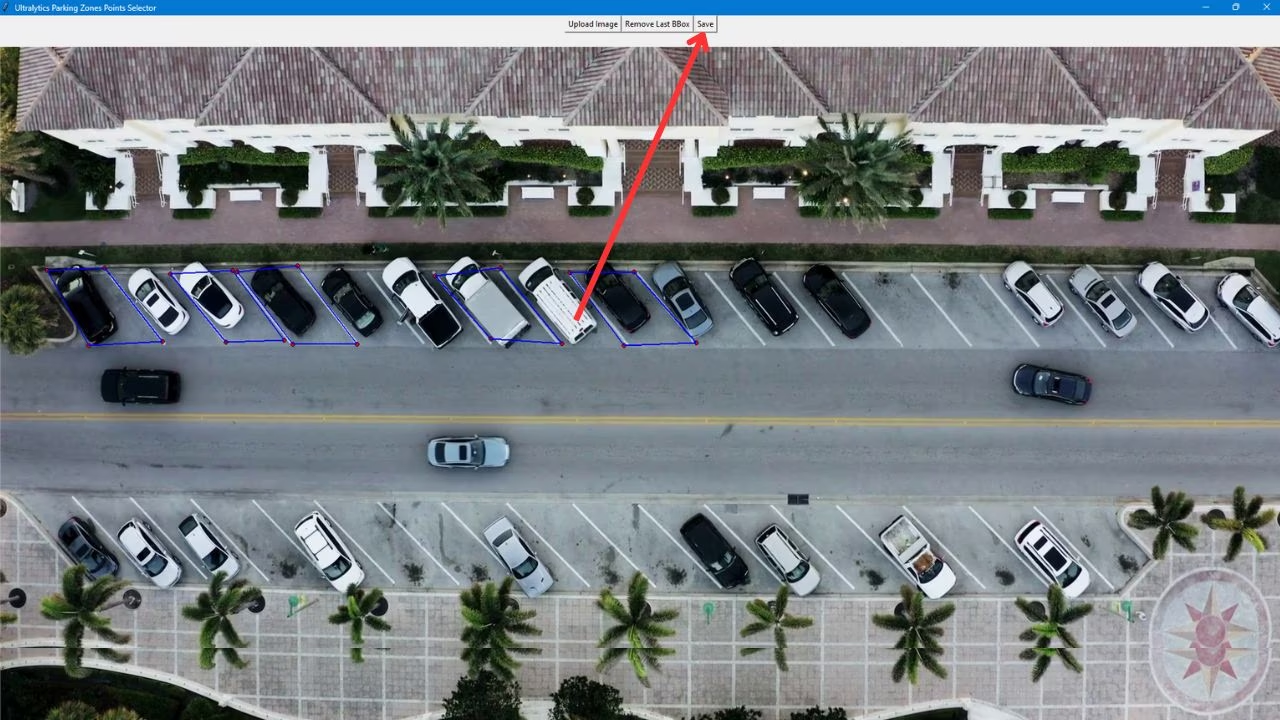
Schritt 2: Verwenden Sie den bereitgestellten Code, um eine grafische Oberfläche zu starten, in der Sie ein Bild auswählen und mit dem Mausclick Parkbereiche umreißen können, um Polygone zu erstellen.
Parkplatz-Annotator Ultralytics YOLO
Zusätzlicher Schritt für die Installation tkinter
Im Allgemeinen tkinter wird standardmäßig mit Python ausgeliefert. Sollte dies jedoch nicht der Fall sein, können Sie es mit den hervorgehobenen Schritten installieren:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Architektur:
sudo pacman -S tk - Windows: Installieren Sie python neu und aktivieren Sie das Kontrollkästchen
tcl/tk and IDLEan Optionale Funktionen während der Installation - MacOS: Installieren Sie python von neu https://www.python.org/downloads/macos/ oder
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Schritt 3: Nachdem Sie die Parkflächen mit Polygonen definiert haben, klicken Sie auf save um eine JSON-Datei mit den Daten in Ihrem Arbeitsverzeichnis zu speichern.
Schritt 4: Sie können nun den bereitgestellten Code für die Parkplatzverwaltung mit Ultralytics YOLO verwenden.
Parkraummanagement mit Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Hinweis
Erstellen Sie zunächst Anmerkungen zu Parkzonen mithilfe von ParkingPtsSelection() in Python Schritt 2 oben) und übergeben Sie anschließend die JSON-Datei an den CLI .
ParkingManagement Argumente
Hier ist eine Tabelle mit den ParkingManagement Argumente:
| Argument | Typ | Standard | Beschreibung |
|---|---|---|---|
model | str | None | Pfad zu einer Ultralytics YOLO Modelldatei. |
json_file | str | None | Pfad zur JSON-Datei, die alle Parkkoordinatendaten enthält. |
Die ParkingManagement Lösung ermöglicht die Verwendung von mehreren track Parameter:
| Argument | Typ | Standard | Beschreibung |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Gibt den zu verwendenden Tracking-Algorithmus an, z. B. bytetrack.yaml oder botsort.yaml. |
conf | float | 0.1 | Legt den Konfidenzschwellenwert für Erkennungen fest; niedrigere Werte ermöglichen die Verfolgung von mehr Objekten, können aber auch falsch positive Ergebnisse liefern. |
iou | float | 0.7 | Legt den Intersection over Union (IoU)-Schwellenwert für das Filtern überlappender Detektionen fest. |
classes | list | None | Filtert Ergebnisse nach Klassenindex. Zum Beispiel, classes=[0, 2, 3] verfolgt nur die angegebenen Klassen. |
verbose | bool | True | Steuert die Anzeige der Tracking-Ergebnisse und bietet eine visuelle Ausgabe der verfolgten Objekte. |
device | str | None | Gibt das Gerät für die Inferenz an (z. B. cpu, cuda:0 oder 0). Ermöglicht es Benutzern, zwischen CPU, einer bestimmten GPU oder anderen Rechengeräten für die Modellausführung zu wählen. |
Darüber hinaus werden die folgenden Visualisierungsoptionen unterstützt:
| Argument | Typ | Standard | Beschreibung |
|---|---|---|---|
show | bool | False | Wenn Trueaktiviert, werden die annotierten Bilder oder Videos in einem Fenster angezeigt. Nützlich für sofortiges visuelles Feedback während der Entwicklung oder des Testens. |
line_width | int or None | None | Gibt die Linienbreite der Begrenzungsrahmen an. Wenn None, wird die Linienbreite automatisch an die Bildgröße angepasst. Bietet eine visuelle Anpassung für mehr Klarheit. |
FAQ
Wie verbessert Ultralytics YOLO26 Parkraummanagementsysteme?
Ultralytics YOLO26 verbessert Parkraummanagementsysteme erheblich durch Echtzeit-Fahrzeugerkennung und -überwachung. Dies führt zu einer optimierten Nutzung der Parkflächen, einer Reduzierung von Staus und einer verbesserten Sicherheit durch kontinuierliche Überwachung. Das Parkraummanagementsystem ermöglicht einen effizienten Verkehrsfluss, minimiert Leerlaufzeiten und Emissionen auf Parkplätzen und trägt somit zur ökologischen Nachhaltigkeit bei. Weitere Details finden Sie im Workflow des Parkraummanagement-Codes.
Welche Vorteile bietet der Einsatz von Ultralytics YOLO26 für intelligentes Parken?
Der Einsatz von Ultralytics YOLO26 für intelligentes Parken bietet zahlreiche Vorteile:
- Effizienz: Optimiert die Nutzung von Parkplätzen und reduziert Staus.
- Sicherheit: Verbessert die Überwachung und gewährleistet die Sicherheit von Fahrzeugen und Fußgängern.
- Umweltauswirkungen: Hilft, Emissionen zu reduzieren, indem die Leerlaufzeiten von Fahrzeugen minimiert werden. Weitere Vorteile finden Sie im Abschnitt Vorteile des Parkraummanagementsystems.
Wie kann ich Parkplätze mit Ultralytics YOLO26 definieren?
Das Definieren von Parkplätzen ist mit Ultralytics YOLO26 unkompliziert:
- Erfassen Sie einen Frame aus einem Video- oder Kamerastream.
- Verwenden Sie den bereitgestellten Code, um eine GUI zum Auswählen eines Bildes und zum Zeichnen von Polygonen zur Definition von Parkplätzen zu starten.
- Speichern Sie die beschrifteten Daten im JSON-Format zur Weiterverarbeitung. Umfassende Anweisungen finden Sie im obigen Abschnitt zur Punktauswahl.
Kann ich das YOLO26-Modell für spezifische Anforderungen des Parkraummanagements anpassen?
Ja, Ultralytics YOLO26 ermöglicht die Anpassung an spezifische Anforderungen des Parkraummanagements. Sie können Parameter wie die Farben für belegte und verfügbare Regionen, Ränder für die Textanzeige und vieles mehr. Durch die Nutzung des/der/des ParkingManagement Klasse Argumentekönnen Sie das Modell an Ihre speziellen Anforderungen anpassen und so maximale Effizienz und Effektivität gewährleisten.
Welche realen Anwendungen gibt es für Ultralytics YOLO26 im Parkplatzmanagement?
Ultralytics YOLO26 wird in verschiedenen realen Anwendungen für das Parkplatzmanagement eingesetzt, darunter:
- Parkplatzerkennung: Genaue Identifizierung von verfügbaren und belegten Parkplätzen.
- Überwachung: Verbesserung der Sicherheit durch Echtzeitüberwachung.
- Verwaltung des Verkehrsflusses: Reduzierung von Leerlaufzeiten und Staus durch effiziente Verkehrsabwicklung. Bilder, die diese Anwendungen zeigen, finden Sie unter Anwendungen in der realen Welt.






