Link to this sectionYOLOv7: Trainable Bag-of-Freebies#
YOLOv7, veröffentlicht im Juli 2022, war zum Zeitpunkt seiner Veröffentlichung ein bedeutender Fortschritt bei der Echtzeit-Objekterkennung. Es erreichte 56,8 % AP auf einer GPU V100 und setzte damit bei der Einführung neue Maßstäbe. YOLOv7 übertraf zeitgenössische Objektdetektoren wie YOLOR, YOLOX, Scaled-YOLOv4 und YOLOv5 in Bezug auf Geschwindigkeit und Genauigkeit. Das Modell wird von Grund auf mit dem MS COCO Datensatz trainiert, ohne andere Datensätze oder vortrainierte Gewichte zu verwenden. Der Quellcode für YOLOv7 ist auf GitHub verfügbar. Beachte, dass neuere Modelle wie YOLO11 und YOLO26 inzwischen eine höhere Genauigkeit bei verbesserter Effizienz erreicht haben.
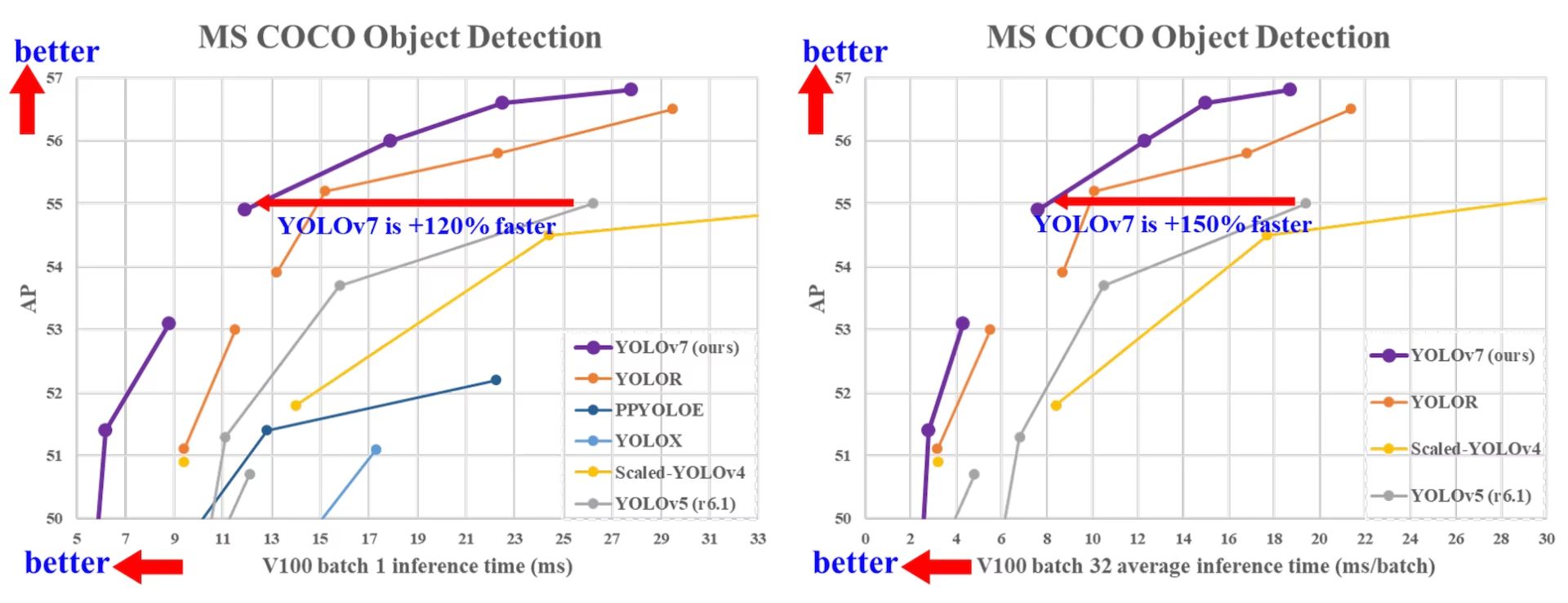
Link to this sectionVergleich von SOTA Objektdetektoren#
Aus den Ergebnissen in der YOLO Vergleichstabelle wissen wir, dass die vorgeschlagene Methode umfassend das beste Verhältnis zwischen Geschwindigkeit und Genauigkeit aufweist. Wenn wir YOLOv7-tiny-SiLU mit YOLOv5-N (r6.1) vergleichen, ist unsere Methode um 127 fps schneller und um 10,7 % genauer beim AP. Zudem erreicht YOLOv7 51,4 % AP bei einer Bildrate von 161 fps, während PPYOLOE-L bei gleichem AP nur eine Bildrate von 78 fps aufweist. In Bezug auf die Parameternutzung liegt YOLOv7 um 41 % unter dem von PPYOLOE-L.
Wenn wir YOLOv7-X mit 114 fps Inferenzgeschwindigkeit mit YOLOv5-L (r6.1) mit 99 fps Inferenzgeschwindigkeit vergleichen, kann YOLOv7-X den AP um 3,9 % verbessern. Wird YOLOv7-X mit YOLOv5-X (r6.1) ähnlicher Skalierung verglichen, ist die Inferenzgeschwindigkeit von YOLOv7-X um 31 fps höher. Zudem reduziert YOLOv7-X im Vergleich zu YOLOv5-X (r6.1) bei der Anzahl der Parameter und der Berechnung 22 % der Parameter sowie 8 % der Berechnung, verbessert den AP jedoch um 2,2 % (Quelle).
| Modell | Parameter (M) | FLOPs (G) | Größe (Pixel) | FPS | APtest / val 50-95 | APtest 50 | APtest 75 | APtest S | APtest M | APtest L |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOX-S | 9.0 | 26.8 | 640 | 102 | 40,5% / 40,5% | - | - | - | - | - |
| YOLOX-M | 25.3 | 73,8 | 640 | 81 | 47,2% / 46,9% | - | - | - | - | - |
| YOLOX-L | 54,2 | 155,6 | 640 | 69 | 50,1% / 49,7% | - | - | - | - | - |
| YOLOX-X | 99,1 | 281,9 | 640 | 58 | 51,5% / 51,1% | - | - | - | - | - |
| PPYOLOE-S | 7,9 | 17,4 | 640 | 208 | 43,1% / 42,7% | 60,5% | 46,6% | 23,2% | 46,4% | 56,9% |
| PPYOLOE-M | 23.4 | 49.9 | 640 | 123 | 48,9% / 48,6% | 66,5% | 53,0% | 28,6% | 52,9% | 63,8% |
| PPYOLOE-L | 52.2 | 110,1 | 640 | 78 | 51,4% / 50,9% | 68,9% | 55,6% | 31,4% | 55,3% | 66,1% |
| PPYOLOE-X | 98,4 | 206,6 | 640 | 45 | 52,2% / 51,9% | 69,9% | 56,5% | 33,3% | 56,3% | 66,4% |
| YOLOv5-N (r6.1) | 1,9 | 4,5 | 640 | 159 | - / 28,0% | - | - | - | - | - |
| YOLOv5-S (r6.1) | 7.2 | 16,5 | 640 | 156 | - / 37,4% | - | - | - | - | - |
| YOLOv5-M (r6.1) | 21,2 | 49,0 | 640 | 122 | - / 45,4% | - | - | - | - | - |
| YOLOv5-L (r6.1) | 46,5 | 109,1 | 640 | 99 | - / 49,0% | - | - | - | - | - |
| YOLOv5-X (r6.1) | 86,7 | 205,7 | 640 | 83 | - / 50,7% | - | - | - | - | - |
| YOLOR-CSP | 52.9 | 120,4 | 640 | 106 | 51,1% / 50,8% | 69,6% | 55,7% | 31,7% | 55,3% | 64,7% |
| YOLOR-CSP-X | 96,9 | 226,8 | 640 | 87 | 53,0% / 52,7% | 71,4% | 57,9% | 33,7% | 57,1 % | 66,8 % |
| YOLOv7-tiny-SiLU | 6.2 | 13,8 | 640 | 286 | 38,7 % / 38,7 % | 56,7 % | 41,7 % | 18,8 % | 42,4 % | 51,9 % |
| YOLOv7 | 36,9 | 104,7 | 640 | 161 | 51,4 % / 51,2 % | 69,7 % | 55,9 % | 31,8 % | 55,5 % | 65,0 % |
| YOLOv7-X | 71,3 | 189,9 | 640 | 114 | 53,1 % / 52,9 % | 71,2 % | 57,8 % | 33,8 % | 57,1 % | 67,4 % |
| YOLOv5-N6 (r6.1) | 3.2 | 18,4 | 1280 | 123 | / 36,0 % | - | - | - | - | - |
| YOLOv5-S6 (r6.1) | 12.6 | 67,2 | 1280 | 122 | / 44,8 % | - | - | - | - | - |
| YOLOv5-M6 (r6.1) | 35,7 | 200,0 | 1280 | 90 | / 51,3 % | - | - | - | - | - |
| YOLOv5-L6 (r6.1) | 76,8 | 445,6 | 1280 | 63 | / 53,7 % | - | - | - | - | - |
| YOLOv5-X6 (r6.1) | 140,7 | 839,2 | 1280 | 38 | / 55,0 % | - | - | - | - | - |
| YOLOR-P6 | 37,2 | 325,6 | 1280 | 76 | 53,9 % / 53,5 % | 71,4% | 58,9 % | 36,1 % | 57,7 % | 65,6 % |
| YOLOR-W6 | 79,8 | 453,2 | 1280 | 66 | 55,2 % / 54,8 % | 72,7 % | 60,5% | 37,7 % | 59,1 % | 67,1 % |
| YOLOR-E6 | 115,8 | 683,2 | 1280 | 45 | 55,8 % / 55,7 % | 73,4 % | 61,1 % | 38,4 % | 59,7 % | 67,7 % |
| YOLOR-D6 | 151.7 | 935,6 | 1280 | 34 | 56,5 % / 56,1 % | 74,1 % | 61,9 % | 38,9 % | 60,4 % | 68,7 % |
| YOLOv7-W6 | 70,4 | 360,0 | 1280 | 84 | 54,9 % / 54,6 % | 72,6 % | 60,1 % | 37,3 % | 58,7 % | 67,1 % |
| YOLOv7-E6 | 97.2 | 515,2 | 1280 | 56 | 56,0 % / 55,9 % | 73,5 % | 61,2 % | 38,0 % | 59,9 % | 68,4% |
| YOLOv7-D6 | 154,7 | 806,8 | 1280 | 44 | 56,6% / 56,3% | 74,0% | 61,8% | 38,8% | 60,1 % | 69,5% |
| YOLOv7-E6E | 151.7 | 843,2 | 1280 | 36 | 56,8% / 56,8% | 74,4% | 62,1% | 39,3% | 60,5% | 69,0% |
Link to this sectionÜbersicht#
Echtzeit-Objekterkennung ist eine wichtige Komponente in vielen Computer-Vision-Systemen, einschließlich Multi-Objektverfolgung, autonomem Fahren, Robotik und medizinischer Bildanalyse. In den letzten Jahren hat sich die Entwicklung der Echtzeit-Objekterkennung auf das Design effizienter Architekturen und die Verbesserung der Inferenzgeschwindigkeit verschiedener CPUs, GPUs und Neural Processing Units (NPUs) konzentriert. YOLOv7 unterstützt sowohl mobile GPU- als auch GPU-Geräte, von der Edge bis zur Cloud.
Im Gegensatz zu herkömmlichen Echtzeit-Objekterkennungsmodellen, die sich auf die Architekturoptimierung konzentrieren, legt YOLOv7 den Fokus auf die Optimierung des Trainingsprozesses. Dies beinhaltet Module und Optimierungsmethoden, die darauf ausgelegt sind, die Genauigkeit der Objekterkennung zu verbessern, ohne die Inferenzkosten zu erhöhen – ein Konzept, das als "trainable bag-of-freebies" bekannt ist.
Link to this sectionHauptfunktionen#
YOLOv7 führt mehrere wichtige Funktionen ein:
-
Modell-Reparametrisierung: YOLOv7 schlägt ein geplantes reparametrisiertes Modell vor, eine Strategie, die auf Schichten in verschiedenen Netzwerken mit dem Konzept des Gradienten-Propagationspfads anwendbar ist.
-
Dynamische Label-Zuweisung: Das Training des Modells mit mehreren Ausgabeschichten bringt ein neues Problem mit sich: "Wie weist man dynamische Ziele für die Ausgaben verschiedener Zweige zu?" Um dieses Problem zu lösen, führt YOLOv7 eine neue Methode der Label-Zuweisung ein, die als "coarse-to-fine lead guided label assignment" bezeichnet wird.
-
Erweiterte und zusammengesetzte Skalierung: YOLOv7 schlägt "Extend"- und "Compound Scaling"-Methoden für den Echtzeit-Objekterkennungs-Algorithmus vor, die Parameter und Rechenleistung effektiv nutzen können.
-
Effizienz: Die von YOLOv7 vorgeschlagene Methode kann die Anzahl der Parameter um etwa 40 % und den Rechenaufwand um 50 % gegenüber modernsten Echtzeit-Objekterkennungsmodellen reduzieren und bietet gleichzeitig eine schnellere Inferenzgeschwindigkeit sowie eine höhere Erkennungsgenauigkeit.
Link to this sectionAnwendungsbeispiele#
Ultralytics veröffentlicht keine yolov7.pt vortrainierten Gewichte oder ultralytics/cfg/models/v7/ YAML-Dateien. Natives PyTorch-Training und Inferenz für YOLOv7 werden vom Ultralytics Python-Paket nicht unterstützt. Du kannst jedoch einen YOLOv7-Checkpoint, der im ursprünglichen YOLOv7-Repository trainiert wurde, in Ultralytics importieren, indem du ihn wie unten gezeigt in ONNX oder TensorRT exportierst.
Link to this sectionONNX-Export#
Um das YOLOv7 ONNX-Modell mit Ultralytics zu verwenden:
-
(Optional) Installiere Ultralytics und exportiere ein ONNX-Modell, damit die erforderlichen Abhängigkeiten automatisch installiert werden:
pip install ultralytics yolo export model=yolo26n.pt format=onnx -
Exportiere das gewünschte YOLOv7-Modell mit dem Exporter im YOLOv7-Repo:
git clone https://github.com/WongKinYiu/yolov7 cd yolov7 python export.py --weights yolov7-tiny.pt --grid --end2end --simplify --topk-all 100 --iou-thres 0.65 --conf-thres 0.35 --img-size 640 640 --max-wh 640 -
Ändere den ONNX-Modellgraphen, um ihn mit dem folgenden Skript mit Ultralytics kompatibel zu machen:
import numpy as np import onnx from onnx import helper, numpy_helper # Load the ONNX model model_path = "yolov7/yolov7-tiny.onnx" # Replace with your model path model = onnx.load(model_path) graph = model.graph # Fix input shape to batch size 1 input_shape = graph.input[0].type.tensor_type.shape input_shape.dim[0].dim_value = 1 # Define the output of the original model original_output_name = graph.output[0].name # Create slicing nodes sliced_output_name = f"{original_output_name}_sliced" # Define initializers for slicing (remove the first value) start = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_start") end = numpy_helper.from_array(np.array([7], dtype=np.int64), name="slice_end") axes = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_axes") steps = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_steps") graph.initializer.extend([start, end, axes, steps]) slice_node = helper.make_node( "Slice", inputs=[original_output_name, "slice_start", "slice_end", "slice_axes", "slice_steps"], outputs=[sliced_output_name], name="SliceNode", ) graph.node.append(slice_node) # Define segment slicing seg1_start = numpy_helper.from_array(np.array([0], dtype=np.int64), name="seg1_start") seg1_end = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg1_end") seg2_start = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg2_start") seg2_end = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg2_end") seg3_start = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg3_start") seg3_end = numpy_helper.from_array(np.array([6], dtype=np.int64), name="seg3_end") graph.initializer.extend([seg1_start, seg1_end, seg2_start, seg2_end, seg3_start, seg3_end]) # Create intermediate tensors for segments segment_1_name = f"{sliced_output_name}_segment1" segment_2_name = f"{sliced_output_name}_segment2" segment_3_name = f"{sliced_output_name}_segment3" # Add segment slicing nodes graph.node.extend( [ helper.make_node( "Slice", inputs=[sliced_output_name, "seg1_start", "seg1_end", "slice_axes", "slice_steps"], outputs=[segment_1_name], name="SliceSegment1", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg2_start", "seg2_end", "slice_axes", "slice_steps"], outputs=[segment_2_name], name="SliceSegment2", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg3_start", "seg3_end", "slice_axes", "slice_steps"], outputs=[segment_3_name], name="SliceSegment3", ), ] ) # Concatenate the segments concat_output_name = f"{sliced_output_name}_concat" concat_node = helper.make_node( "Concat", inputs=[segment_1_name, segment_3_name, segment_2_name], outputs=[concat_output_name], axis=1, name="ConcatSwapped", ) graph.node.append(concat_node) # Reshape to [1, -1, 6] reshape_shape = numpy_helper.from_array(np.array([1, -1, 6], dtype=np.int64), name="reshape_shape") graph.initializer.append(reshape_shape) final_output_name = f"{concat_output_name}_batched" reshape_node = helper.make_node( "Reshape", inputs=[concat_output_name, "reshape_shape"], outputs=[final_output_name], name="AddBatchDimension", ) graph.node.append(reshape_node) # Get the shape of the reshaped tensor shape_node_name = f"{final_output_name}_shape" shape_node = helper.make_node( "Shape", inputs=[final_output_name], outputs=[shape_node_name], name="GetShapeDim", ) graph.node.append(shape_node) # Extract the second dimension dim_1_index = numpy_helper.from_array(np.array([1], dtype=np.int64), name="dim_1_index") graph.initializer.append(dim_1_index) second_dim_name = f"{final_output_name}_dim1" gather_node = helper.make_node( "Gather", inputs=[shape_node_name, "dim_1_index"], outputs=[second_dim_name], name="GatherSecondDim", ) graph.node.append(gather_node) # Subtract from 100 to determine how many values to pad target_size = numpy_helper.from_array(np.array([100], dtype=np.int64), name="target_size") graph.initializer.append(target_size) pad_size_name = f"{second_dim_name}_padsize" sub_node = helper.make_node( "Sub", inputs=["target_size", second_dim_name], outputs=[pad_size_name], name="CalculatePadSize", ) graph.node.append(sub_node) # Build the [2, 3] pad array: # 1st row -> [0, 0, 0] (no padding at the start of any dim) # 2nd row -> [0, pad_size, 0] (pad only at the end of the second dim) pad_starts = numpy_helper.from_array(np.array([0, 0, 0], dtype=np.int64), name="pad_starts") graph.initializer.append(pad_starts) zero_scalar = numpy_helper.from_array(np.array([0], dtype=np.int64), name="zero_scalar") graph.initializer.append(zero_scalar) pad_ends_name = "pad_ends" concat_pad_ends_node = helper.make_node( "Concat", inputs=["zero_scalar", pad_size_name, "zero_scalar"], outputs=[pad_ends_name], axis=0, name="ConcatPadEnds", ) graph.node.append(concat_pad_ends_node) pad_values_name = "pad_values" concat_pad_node = helper.make_node( "Concat", inputs=["pad_starts", pad_ends_name], outputs=[pad_values_name], axis=0, name="ConcatPadStartsEnds", ) graph.node.append(concat_pad_node) # Create Pad operator to pad with zeros pad_output_name = f"{final_output_name}_padded" pad_constant_value = numpy_helper.from_array( np.array([0.0], dtype=np.float32), name="pad_constant_value", ) graph.initializer.append(pad_constant_value) pad_node = helper.make_node( "Pad", inputs=[final_output_name, pad_values_name, "pad_constant_value"], outputs=[pad_output_name], mode="constant", name="PadToFixedSize", ) graph.node.append(pad_node) # Update the graph's final output to [1, 100, 6] new_output_type = onnx.helper.make_tensor_type_proto( elem_type=graph.output[0].type.tensor_type.elem_type, shape=[1, 100, 6] ) new_output = onnx.helper.make_value_info(name=pad_output_name, type_proto=new_output_type) # Replace the old output with the new one graph.output.pop() graph.output.extend([new_output]) # Save the modified model onnx.save(model, "yolov7-ultralytics.onnx") -
Du kannst anschließend das geänderte ONNX-Modell laden und die Inferenz wie gewohnt in Ultralytics ausführen:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.onnx", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionTensorRT-Export#
-
Befolge die Schritte 1-2 im Abschnitt ONNX-Export.
-
Installiere das
TensorRTPython-Paket:pip install tensorrt -
Führe das folgende Skript aus, um das geänderte ONNX-Modell in eine TensorRT-Engine zu konvertieren:
from ultralytics.utils.export import export_engine export_engine("yolov7-ultralytics.onnx", half=True) -
Lade das Modell und führe es in Ultralytics aus:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.engine", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionZitate und Danksagungen#
Wir möchten den Autoren von YOLOv7 für ihre bedeutenden Beiträge im Bereich der Echtzeit-Objekterkennung danken:
@inproceedings{wang2023yolov7,
title={YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors},
author={Wang, Chien-Yao and Bochkovskiy, Alexey and Liao, Hong-Yuan Mark},
booktitle={Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition (CVPR)},
pages={7464--7475},
year={2023}
}Das offizielle YOLOv7-Paper wurde im CVF 2023 Open Access veröffentlicht, mit einem Preprint auf arXiv. Die Autoren haben ihre Arbeit öffentlich zugänglich gemacht, und die Codebasis kann auf GitHub abgerufen werden. Wir schätzen ihre Bemühungen, den Bereich voranzubringen und ihre Arbeit der breiteren Community zugänglich zu machen.
Link to this sectionFAQ#
Link to this sectionWas ist YOLOv7 und warum gilt es als Durchbruch in der Echtzeit-Objekterkennung?#
YOLOv7, veröffentlicht im Juli 2022, war ein bedeutendes Echtzeit-Objekterkennungsmodell, das zum Zeitpunkt seiner Veröffentlichung eine exzellente Geschwindigkeit und Genauigkeit erreichte. Es übertraf zeitgenössische Modelle wie YOLOX, YOLOv5 und PPYOLOE sowohl in der Parameternutzung als auch in der Inferenzgeschwindigkeit. Zu den herausragenden Merkmalen von YOLOv7 gehören die Modell-Reparametrisierung und die dynamische Label-Zuweisung, die die Leistung ohne Erhöhung der Inferenzkosten optimieren. Weitere technische Details zur Architektur und Vergleichsmetriken mit anderen modernsten Objekterkennungsmodellen findest du im YOLOv7-Paper.
Link to this sectionWie verbessert YOLOv7 die vorherigen YOLO-Modelle wie YOLOv4 und YOLOv5?#
YOLOv7 führt mehrere Innovationen ein, darunter Modell-Reparametrisierung und dynamische Label-Zuweisung, die den Trainingsprozess verbessern und die Inferenzgenauigkeit erhöhen. Im Vergleich zu YOLOv5 steigert YOLOv7 Geschwindigkeit und Genauigkeit erheblich. Beispielsweise verbessert YOLOv7-X die Genauigkeit um 2,2 % und reduziert die Parameter um 22 % im Vergleich zu YOLOv5-X. Detaillierte Vergleiche findest du in der Leistungstabelle YOLOv7-Vergleich mit SOTA-Objekterkennungsmodellen.
Link to this sectionKann ich YOLOv7 mit Ultralytics-Tools und -Plattformen verwenden?#
Aktuell unterstützt Ultralytics nur die YOLOv7-Inferenz via ONNX und TensorRT. Um die exportierte ONNX- und TensorRT-Version von YOLOv7 mit Ultralytics auszuführen, lies den Abschnitt Anwendungsbeispiele.
Link to this sectionWie trainiere ich ein benutzerdefiniertes YOLOv7-Modell mit meinem Datensatz?#
Um ein benutzerdefiniertes YOLOv7-Modell zu installieren und zu trainieren, befolge diese Schritte:
-
Klone das YOLOv7-Repository:
git clone https://github.com/WongKinYiu/yolov7 -
Navigiere in das geklonte Verzeichnis und installiere die Abhängigkeiten:
cd yolov7 pip install -r requirements.txt -
Bereite deinen Datensatz vor und konfiguriere die Modellparameter gemäß den Nutzungsanweisungen, die im Repository bereitgestellt werden. Für weitere Anleitungen besuche das YOLOv7 GitHub-Repository für die neuesten Informationen und Updates.
-
Nach dem Training kannst du das Modell wie unter Anwendungsbeispiele beschrieben in ONNX oder TensorRT für die Verwendung in Ultralytics exportieren.
Link to this sectionWas sind die Hauptfunktionen und Optimierungen, die in YOLOv7 eingeführt wurden?#
YOLOv7 bietet mehrere Hauptfunktionen, die die Echtzeit-Objekterkennung revolutionieren:
- Modell-Reparametrisierung: Verbessert die Leistung des Modells durch Optimierung der Gradienten-Propagationspfade.
- Dynamische Label-Zuweisung: Nutzt eine "Coarse-to-Fine"-Methode, um dynamische Ziele für Ausgaben über verschiedene Zweige hinweg zuzuweisen, was die Genauigkeit verbessert.
- Erweiterte und zusammengesetzte Skalierung: Nutzt Parameter und Rechenleistung effizient, um das Modell für verschiedene Echtzeitanwendungen zu skalieren.
- Effizienz: Reduziert die Parameteranzahl um 40 % und den Rechenaufwand um 50 % im Vergleich zu anderen modernen Modellen und erreicht dabei schnellere Inferenzgeschwindigkeiten.
Weitere Details zu diesen Funktionen findest du im Abschnitt YOLOv7-Übersicht.