Link to this sectionPredicción de modelos con Ultralytics YOLO#
Link to this sectionIntroducción#
En el mundo del machine learning y la computer vision, el proceso de interpretar datos visuales se denomina a menudo inferencia o predicción. Ultralytics YOLO26 ofrece una potente función conocida como modo de predicción (predict mode), diseñada para obtener inferencias en tiempo real y de alto rendimiento en una amplia gama de fuentes de datos.
Watch: How to Extract Results from Ultralytics YOLO26 Tasks for Custom Projects 🚀
Link to this sectionAplicaciones en el mundo real#
| Fabricación | Deportes | Seguridad |
|---|---|---|
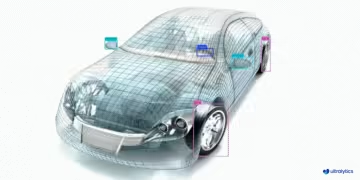 | 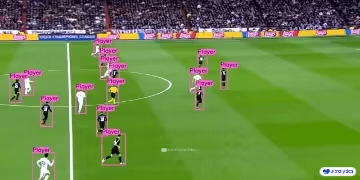 | 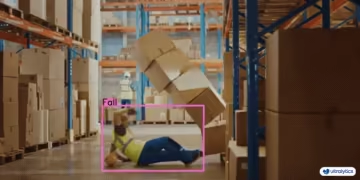 |
| Detección de piezas de repuesto de vehículos | Detección de jugadores de fútbol | Detección de caídas de personas |
Link to this section¿Por qué usar Ultralytics YOLO para la inferencia?#
Aquí tienes por qué deberías considerar el modo de predicción de YOLO26 para tus diversas necesidades de inferencia:
- Versatilidad: Capaz de realizar inferencias en imágenes, vídeos e incluso transmisiones en vivo.
- Rendimiento: Diseñado para un procesamiento de alta velocidad en tiempo real sin sacrificar la accuracy.
- Facilidad de uso: Interfaces intuitivas de Python y CLI para un despliegue y pruebas rápidas.
- Altamente personalizable: Diversos ajustes y parámetros para adaptar el comportamiento de inferencia del modelo según tus requisitos específicos.
- Listo para producción: Despliega modelos como endpoints de API en Ultralytics Platform con escalado automático y monitorización, o ejecuta la inferencia localmente.
Link to this sectionCaracterísticas clave del modo de predicción#
El modo de predicción de YOLO26 está diseñado para ser robusto y versátil, incluyendo:
- Compatibilidad con múltiples fuentes de datos: Ya sea que tus datos tengan forma de imágenes individuales, una colección de imágenes, archivos de vídeo o transmisiones de vídeo en tiempo real, el modo de predicción te cubre.
- Modo streaming: Utiliza la función de streaming para generar un generador eficiente en memoria de objetos
Results. Habilítalo configurandostream=Trueen el método de llamada del predictor. A diferencia del comportamiento predeterminado (stream=False), que devuelve una lista que contiene todos los resultados,stream=Truegenera los resultados uno a uno, lo que lo hace especialmente útil para vídeos largos y transmisiones en directo. - Procesamiento por lotes: Procesa múltiples imágenes o fotogramas de vídeo en un solo lote, lo que reduce aún más el tiempo total de inferencia.
- Fácil integración: Integra fácilmente con pipelines de datos existentes y otros componentes de software, gracias a su API flexible.
Los modelos de Ultralytics YOLO devuelven una lista de Python de objetos Results o un generador de objetos Results eficiente en memoria cuando se pasa stream=True al modelo durante la inferencia:
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n.pt") # pretrained YOLO26n model
# Run batched inference on a list of images
results = model(["image1.jpg", "image2.jpg"]) # return a list of Results objects
# Process results list
for result in results:
boxes = result.boxes # Boxes object for bounding box outputs
masks = result.masks # Masks object for segmentation masks outputs
keypoints = result.keypoints # Keypoints object for pose outputs
probs = result.probs # Probs object for classification outputs
obb = result.obb # Oriented boxes object for OBB outputs
result.show() # display to screen
result.save(filename="result.jpg") # save to diskLink to this sectionFuentes de inferencia#
YOLO26 puede procesar diferentes tipos de fuentes de entrada para la inferencia, como se muestra en la tabla a continuación. Las fuentes incluyen imágenes estáticas, transmisiones de vídeo y varios formatos de datos. La tabla también indica si cada fuente puede utilizarse en modo de streaming con el argumento stream=True ✅. El modo de streaming es beneficioso para procesar vídeos o transmisiones en vivo, ya que crea un generador de resultados en lugar de cargar todos los fotogramas en la memoria.
Usa stream=True para procesar vídeos largos o grandes conjuntos de datos para gestionar la memoria de forma eficiente. Cuando stream=False, los resultados de todos los fotogramas o puntos de datos se almacenan en la memoria, lo que puede acumularse rápidamente y causar errores de falta de memoria (out-of-memory) en entradas grandes. Por el contrario, stream=True utiliza un generador que solo mantiene en memoria los resultados del fotograma o punto de datos actual, reduciendo significativamente el consumo de memoria y evitando problemas de memoria insuficiente.
| Fuente | Ejemplo | Tipo | Notas |
|---|---|---|---|
| image | 'image.jpg' | str o Path | Archivo de imagen único. |
| URL | 'https://ultralytics.com/images/bus.jpg' | str | URL a una imagen. |
| screenshot | 'screen' | str | Capturar una captura de pantalla. |
| PIL | Image.open('image.jpg') | PIL.Image | Formato HWC con canales RGB. |
| OpenCV | cv2.imread('image.jpg') | np.ndarray | Formato HWC con canales BGR uint8 (0-255). |
| NumPy | np.zeros((640,1280,3)) | np.ndarray | Formato HWC con canales BGR uint8 (0-255). |
| torch | torch.zeros(16,3,320,640) | torch.Tensor | Formato BCHW con canales RGB float32 (0.0-1.0). |
| CSV | 'sources.csv' | str o Path | Archivo CSV que contiene rutas a imágenes, vídeos o directorios. |
| video ✅ | 'video.mp4' | str o Path | Archivo de vídeo en formatos como MP4, AVI, etc. |
| directory ✅ | 'path/' | str o Path | Ruta a un directorio que contiene imágenes o vídeos. |
| glob ✅ | 'path/*.jpg' | str | Patrón glob para coincidir con varios archivos. Usa el carácter * como comodín. |
| YouTube ✅ | 'https://youtu.be/LNwODJXcvt4' | str | URL a un vídeo de YouTube. |
| stream ✅ | 'rtsp://example.com/media.mp4' | str | URL para protocolos de streaming como RTSP, RTMP, TCP o una dirección IP. |
| multi-stream ✅ | 'list.streams' | str o Path | Archivo de texto *.streams con una URL de flujo por línea; p. ej., 8 flujos se ejecutarán con un batch-size de 8. |
| webcam ✅ | 0 | int | Índice del dispositivo de cámara conectado para ejecutar la inferencia. |
A continuación, tienes ejemplos de código para utilizar cada tipo de fuente:
Ejecuta la inferencia en un archivo de imagen.
from ultralytics import YOLO
# Load a pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Define path to the image file
source = "path/to/image.jpg"
# Run inference on the source
results = model(source) # list of Results objectsLink to this sectionArgumentos de inferencia#
model.predict() acepta múltiples argumentos que se pueden pasar en el momento de la inferencia para anular los valores predeterminados:
Link to this sectionForma fija frente a rectángulo mínimo (rect)#
De forma predeterminada, predict usa rect=True, lo que permite el relleno de rectángulo mínimo cuando es posible. La imagen se escala para ajustarse dentro de imgsz y se rellena solo hasta el múltiplo de stride más cercano, por lo que el tensor final puede ser más pequeño que imgsz. El relleno de rectángulo mínimo solo se utiliza cuando todas las imágenes del lote tienen la misma forma y el backend lo admite (PyTorch .pt, o ONNX / Triton dinámico). De lo contrario, las imágenes se rellenan hasta el objetivo imgsz completo.
Usa rect=False para rellenar siempre hasta el objetivo imgsz completo. Esto se recomienda cuando necesitas un tamaño de entrada fijo para que coincida con los modelos exportados (ONNX, TensorRT, etc.).
imgsz entero frente a tupla
- Un entero
imgsz=640se convierte en un objetivo cuadrado(640, 640)después del redondeo de stride. - Una tupla
imgsz=(384, 672)establece un objetivo rectangular. Conrect=Trueyauto=True, el tensor real puede ser más pequeño que este objetivo.
Entrenamiento frente a predict/exportación
El entrenamiento solo acepta un único entero imgsz (una lista [h, w] se fuerza al valor mayor). Predict y la exportación aceptan un entero o una tupla (height, width).
from ultralytics import YOLO
# Load a pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Run inference on 'bus.jpg' with arguments
model.predict("https://ultralytics.com/images/bus.jpg", save=True, imgsz=320, conf=0.25)Argumentos de inferencia:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
source | str o int o None | None | Especifica la fuente de datos para la inferencia. Puede ser una ruta de imagen, un archivo de vídeo, un directorio, una URL o un ID de dispositivo para fuentes en directo. Si se omite, se registra una advertencia y el modelo vuelve a los activos de demostración integrados (ultralytics/assets, o una URL de demostración para OBB). Admite una amplia gama de formatos y fuentes, lo que permite una aplicación flexible en diferentes tipos de entrada. |
conf | float | 0.25 | Establece el umbral mínimo de confianza para las detecciones. Los objetos detectados con una confianza inferior a este umbral serán descartados. Ajustar este valor puede ayudar a reducir los falsos positivos. |
iou | float | 0.7 | Umbral de Intersección sobre Unión (IoU) para la Supresión de no máximos (NMS). Valores más bajos resultan en menos detecciones al eliminar cajas superpuestas, lo cual es útil para reducir duplicados. |
imgsz | int o tuple | 640 | Destino para Letterbox. Un número entero da un cuadrado N×N; una tupla da (height, width). Con rect=True, el tensor real puede ser más pequeño que este destino debido al relleno de rectángulo mínimo. Usa rect=False para un tamaño fijo. Consulta Forma fija frente a rectángulo mínimo. |
rect | bool | True | Si es True, utiliza el relleno de rectángulo mínimo cuando sea posible (lotes de misma forma y backend admitido). Si es False, siempre rellena hasta el imgsz completo. Consulta Forma fija frente a rectángulo mínimo. |
quantize | int o str | None | Precisión de inferencia: 16/"fp16" habilita la inferencia FP16 en GPUs compatibles; 32/"fp32"/sin definir es FP32. La cuantización INT8/PTQ se configura durante la exportación y, a continuación, se utiliza cargando el modelo exportado. Sustituye al flag half obsoleto. |
device | str | None | Especifica el dispositivo para la inferencia (p. ej., cpu, cuda:0, 0, npu o npu:0). Permite a los usuarios seleccionar entre CPU, una GPU específica, NPU Huawei Ascend u otros dispositivos de cómputo para la ejecución del modelo. |
batch | int | 1 | Especifica el tamaño del lote para la inferencia (solo funciona cuando la fuente es un directorio, un archivo de vídeo o un archivo .txt). Un tamaño de lote mayor puede proporcionar un mayor rendimiento, acortando la cantidad total de tiempo necesario para la inferencia. |
max_det | int | 300 | Número máximo de detecciones permitidas por imagen. Limita el número total de objetos que el modelo puede detectar en una única inferencia, evitando salidas excesivas en escenas densas. |
vid_stride | int | 1 | Salto de fotogramas para entradas de vídeo. Permite omitir fotogramas en vídeos para acelerar el procesamiento a costa de la resolución temporal. Un valor de 1 procesa cada fotograma, valores más altos omiten fotogramas. |
stream_buffer | bool | False | Determina si se deben poner en cola los fotogramas entrantes para flujos de vídeo. Si es False, los fotogramas antiguos se descartan para dar cabida a los nuevos (optimizado para aplicaciones en tiempo real). Si es True, pone en cola los nuevos fotogramas en un búfer, asegurando que no se omitan fotogramas, pero provocará latencia si los FPS de inferencia son inferiores a los FPS del flujo. |
visualize | bool | False | Activa la visualización de las características del modelo durante la inferencia, proporcionando información sobre lo que el modelo está "viendo". Útil para depuración e interpretación del modelo. |
augment | bool | False | Habilita la aumentación durante la prueba (TTA) para las predicciones, mejorando potencialmente la robustez de la detección a costa de la velocidad de inferencia. |
agnostic_nms | bool | False | Habilita la Supresión de no máximos (NMS) agnóstica de clase, que fusiona cajas superpuestas de diferentes clases. Útil en escenarios de detección multiclase donde la superposición de clases es común. Para modelos de extremo a extremo (YOLO26, YOLOv10), esto solo evita que la misma detección aparezca con múltiples etiquetas de clase (duplicados de IoU=1.0) y no realiza una supresión basada en el umbral de IoU entre cajas distintas. |
classes | list[int] | None | Filtra las predicciones a un conjunto de IDs de clase. Solo se devolverán las detecciones pertenecientes a las clases especificadas. Útil para centrarse en objetos relevantes en tareas de detección multiclase. |
retina_masks | bool | False | Devuelve máscaras de segmentación de alta resolución. Las máscaras devueltas (masks.data) coincidirán con el tamaño original de la imagen si está habilitado. Si está deshabilitado, tienen el tamaño de la imagen utilizado durante la inferencia. |
embed | list[int] | None | Especifica las capas desde las que extraer vectores de características o embeddings. Usa model.embed(source) para obtener los embeddings de la penúltima capa, o model.predict(source, embed=[layer]) para seleccionar capas específicas. Es útil para tareas posteriores como la agrupación o la búsqueda de similitud. |
project | str | None | Nombre del directorio del proyecto donde se guardan las salidas de predicción si save está habilitado. |
name | str | None | Nombre de la ejecución de predicción. Se utiliza para crear un subdirectorio dentro de la carpeta del proyecto, donde se almacenan las salidas de predicción si save está habilitado. |
stream | bool | False | Habilita el procesamiento eficiente en memoria para vídeos largos o numerosas imágenes al devolver un generador de objetos Results en lugar de cargar todos los fotogramas en la memoria de una vez. |
verbose | bool | True | Controla si se deben mostrar registros de inferencia detallados en el terminal, proporcionando información en tiempo real sobre el proceso de predicción. |
compile | bool o str | False | Habilita la compilación de grafos torch.compile de PyTorch 2.x con backend='inductor'. Acepta True → "default", False → desactiva, o un modo de cadena como "default", "reduce-overhead", "max-autotune-no-cudagraphs". Vuelve al modo entusiasta con una advertencia si no es compatible. |
end2end | bool | None | Sobrescribe el modo de extremo a extremo en los modelos YOLO que admiten inferencia sin NMS (YOLO26, YOLOv10). Establecerlo en False permite ejecutar la predicción utilizando la tubería tradicional de NMS, permitiendo además utilizar el argumento iou. Consulta la Guía de detección de extremo a extremo para más detalles. |
Argumentos de visualización:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
show | bool | False | Si es True, muestra las imágenes o vídeos anotados en una ventana. Útil para una retroalimentación visual inmediata durante el desarrollo o las pruebas. |
save | bool | False or True | Habilita el guardado de las imágenes o vídeos anotados en archivos. Útil para documentación, análisis posterior o compartir resultados. Predeterminado a True cuando se usa CLI y False cuando se usa en Python. |
save_frames | bool | False | Al procesar vídeos, guarda fotogramas individuales como imágenes. Útil para extraer fotogramas específicos o para un análisis detallado fotograma a fotograma. |
save_txt | bool | False | Guarda los resultados de detección en un archivo de texto, siguiendo el formato [class] [x_center] [y_center] [width] [height] [confidence]. Útil para la integración con otras herramientas de análisis. |
save_conf | bool | False | Incluye puntuaciones de confianza en los archivos de texto guardados. Mejora el detalle disponible para el posprocesamiento y el análisis. |
save_crop | bool | False | Guarda imágenes recortadas de las detecciones. Útil para la aumentación de conjuntos de datos, el análisis o la creación de conjuntos de datos enfocados en objetos específicos. |
show_labels | bool | True | Muestra las etiquetas para cada detección en la salida visual. Proporciona una comprensión inmediata de los objetos detectados. |
show_conf | bool | True | Muestra la puntuación de confianza para cada detección junto a la etiqueta. Proporciona información sobre la certeza del modelo para cada detección. |
show_boxes | bool | True | Dibuja cajas delimitadoras alrededor de los objetos detectados. Esencial para la identificación visual y la ubicación de objetos en imágenes o fotogramas de vídeo. |
line_width | int or None | None | Especifica el ancho de línea de los cuadros delimitadores. Si es None, el ancho de línea se ajusta automáticamente según el tamaño de la imagen. Proporciona personalización visual para mayor claridad. |
Link to this sectionFormatos de imagen y vídeo#
YOLO26 admite varios formatos de imagen y vídeo, tal como se especifica en ultralytics/data/utils.py. Consulta las tablas a continuación para ver los sufijos válidos y ejemplos de comandos de predict.
Link to this sectionImágenes#
La tabla siguiente contiene formatos de imagen Ultralytics válidos.
Los formatos HEIC/HEIF requieren pi-heif, que se instala automáticamente en el primer uso. AVIF es compatible de forma nativa con Pillow.
| Sufijos de imagen | Ejemplo de comando Predict | Referencia |
|---|---|---|
.avif | yolo predict source=image.avif | Formato de archivo de imagen AV1 |
.bmp | yolo predict source=image.bmp | Formato de archivo BMP de Microsoft |
.dng | yolo predict source=image.dng | Adobe DNG |
.heic | yolo predict source=image.heic | Formato de imagen de alta eficiencia |
.heif | yolo predict source=image.heif | Formato de imagen de alta eficiencia |
.jp2 | yolo predict source=image.jp2 | JPEG 2000 |
.jpeg | yolo predict source=image.jpeg | JPEG |
.jpg | yolo predict source=image.jpg | JPEG |
.mpo | yolo predict source=image.mpo | Objeto de imagen múltiple |
.png | yolo predict source=image.png | Gráficos de red portátiles |
.tif | yolo predict source=image.tif | Formato de archivo de imagen etiquetada |
.tiff | yolo predict source=image.tiff | Formato de archivo de imagen etiquetada |
.webp | yolo predict source=image.webp | WebP |
Link to this sectionVídeos#
La tabla siguiente contiene formatos de vídeo Ultralytics válidos.
| Sufijos de vídeo | Ejemplo de comando Predict | Referencia |
|---|---|---|
.asf | yolo predict source=video.asf | Formato de sistemas avanzados |
.avi | yolo predict source=video.avi | Audio Video Interleave |
.gif | yolo predict source=video.gif | Formato de intercambio de gráficos |
.m4v | yolo predict source=video.m4v | MPEG-4 Parte 14 |
.mkv | yolo predict source=video.mkv | Matroska |
.mov | yolo predict source=video.mov | Formato de archivo QuickTime |
.mp4 | yolo predict source=video.mp4 | MPEG-4 Parte 14 - Wikipedia |
.mpeg | yolo predict source=video.mpeg | MPEG-1 Parte 2 |
.mpg | yolo predict source=video.mpg | MPEG-1 Parte 2 |
.ts | yolo predict source=video.ts | MPEG Transport Stream |
.wmv | yolo predict source=video.wmv | Windows Media Video |
.webm | yolo predict source=video.webm | Proyecto WebM |
Link to this sectionTrabajar con resultados#
Todas las llamadas predict() de Ultralytics devolverán una lista de objetos Results:
from ultralytics import YOLO
# Load a pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/bus.jpg")
results = model(
[
"https://ultralytics.com/images/bus.jpg",
"https://ultralytics.com/images/zidane.jpg",
]
) # batch inferenceLos objetos Results tienen los siguientes atributos:
| Atributo | Tipo | Descripción |
|---|---|---|
orig_img | np.ndarray | La imagen original como un array de NumPy. |
orig_shape | tuple | La forma de la imagen original en formato (altura, anchura). |
boxes | Boxes, optional | Un objeto Boxes que contiene las cajas delimitadoras de la detección. |
masks | Masks, optional | Un objeto Masks que contiene las máscaras de la detección. |
probs | Probs, optional | Un objeto Probs que contiene las probabilidades de cada clase para la tarea de clasificación. |
keypoints | Keypoints, optional | Un objeto Keypoints que contiene los puntos clave detectados para cada objeto. |
obb | OBB, optional | Un objeto OBB que contiene cajas delimitadoras orientadas. |
semantic_mask | SemanticMask, optional | Un objeto SemanticMask que contiene un mapa de clases denso por píxel. |
speed | dict | Un diccionario con las velocidades de preprocesamiento, inferencia y posprocesamiento en milisegundos por imagen. |
names | dict | Un diccionario que mapea los índices de clase a los nombres de clase. |
path | str | La ruta al archivo de imagen. |
save_dir | str, optional | Directorio para guardar los resultados. |
Link to this sectionResultados por tarea#
Cada predicción devuelve un objeto Results por imagen o fotograma. Los campos comunes anteriores están siempre disponibles, mientras que los datos de predicción específicos de la tarea se almacenan en los campos siguientes. Los tensores de coordenadas, confianza y probabilidad son torch.float32 a menos que se utilice precisión media, en cuyo caso son torch.float16. Tras result.numpy(), los tensores se convierten en arrays de NumPy con los dtypes de NumPy correspondientes. Las máscaras de instancia son tensores binarios torch.uint8, mientras que las máscaras semánticas utilizan el dtype entero más práctico para los IDs de clase: torch.uint8, torch.int16 o torch.int32, dependiendo del número de clases.
| Atributo | Tipo | Forma | Descripción |
|---|---|---|---|
result.boxes | Boxes | (N) | Cajas de detección. |
result.boxes.data | torch.float32 | (N,6/7) | Datos sin procesar [x1,y1,x2,y2,conf,cls], más ID de seguimiento opcional. |
result.boxes.xyxy | torch.float32 | (N,4) | Cajas en píxeles xyxy. |
result.boxes.conf | torch.float32 | (N,) | Puntuaciones de confianza. |
result.boxes.cls | torch.float32 | (N,) | IDs de clase; convertir a int para obtener los nombres. |
Los objetos Results tienen los siguientes métodos:
| Método | Tipo de retorno | Descripción |
|---|---|---|
update() | None | Actualiza el objeto Results con nuevos datos como cajas, máscaras, probabilidades, obb, puntos clave o máscaras semánticas. |
cpu() | Results | Devuelve una copia del objeto Results con todos los tensores movidos a la memoria de la CPU. |
numpy() | Results | Devuelve una copia del objeto Results con todos los tensores convertidos en matrices NumPy. |
cuda() | Results | Devuelve una copia del objeto Results con todos los tensores movidos a la memoria de la GPU. |
to() | Results | Devuelve una copia del objeto Results con los tensores movidos al dispositivo y dtype especificados. |
new() | Results | Crea un nuevo objeto Results con los mismos atributos de imagen, ruta, nombres y velocidad. |
plot() | np.ndarray | Dibuja los resultados de detección en una imagen BGR de entrada y devuelve la imagen anotada. |
show() | None | Muestra la imagen con los resultados de inferencia anotados. |
save() | str | Guarda la imagen de los resultados de inferencia anotados en un archivo y devuelve el nombre del archivo. |
verbose() | str | Devuelve una cadena de registro para cada tarea, detallando los resultados de detección y clasificación. |
save_txt() | str | Guarda los resultados de la detección en un archivo de texto y devuelve la ruta al archivo guardado. |
save_crop() | None | Guarda las imágenes de detección recortadas en el directorio especificado. |
summary() | List[Dict[str, Any]] | Convierte los resultados de la inferencia en un diccionario resumido con normalización opcional. |
to_df() | DataFrame | Convierte los resultados de la detección en un DataFrame de Polars. |
to_csv() | str | Convierte los resultados de la detección al formato CSV. |
to_json() | str | Convierte los resultados de la detección al formato JSON. |
Para más detalles, consulta la documentación de la clase Results.
Link to this sectionCajas (Boxes)#
El objeto Boxes puede utilizarse para indexar, manipular y convertir cajas delimitadoras a diferentes formatos.
from ultralytics import YOLO
# Load a pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/bus.jpg") # results list
# View results
for r in results:
print(r.boxes) # print the Boxes object containing the detection bounding boxesAquí tienes una tabla con los métodos y propiedades de la clase Boxes, incluyendo su nombre, tipo y descripción:
| Nombre | Tipo | Descripción |
|---|---|---|
cpu() | Método | Mueve el objeto a la memoria de la CPU. |
numpy() | Método | Convierte el objeto a una matriz NumPy. |
cuda() | Método | Mueve el objeto a la memoria CUDA. |
to() | Método | Mueve el objeto al dispositivo especificado. |
xyxy | Propiedad (torch.Tensor) | Devuelve las cajas en formato xyxy. |
conf | Propiedad (torch.Tensor) | Devuelve los valores de confianza de las cajas. |
cls | Propiedad (torch.Tensor) | Devuelve los valores de clase de las cajas. |
id | Propiedad (torch.Tensor) | Devuelve los IDs de seguimiento de las cajas (si están disponibles). |
xywh | Propiedad (torch.Tensor) | Devuelve las cajas en formato xywh. |
xyxyn | Propiedad (torch.Tensor) | Devuelve las cajas en formato xyxy normalizadas por el tamaño original de la imagen. |
xywhn | Propiedad (torch.Tensor) | Devuelve las cajas en formato xywh normalizadas por el tamaño original de la imagen. |
Para más detalles, consulta la documentación de la clase Boxes.
Link to this sectionMáscaras#
El objeto Masks puede utilizarse para indexar, manipular y convertir máscaras en segmentos.
from ultralytics import YOLO
# Load a pretrained YOLO26n-seg Segment model
model = YOLO("yolo26n-seg.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/bus.jpg") # results list
# View results
for r in results:
print(r.masks) # print the Masks object containing the detected instance masksAquí tienes una tabla con los métodos y propiedades de la clase Masks, incluyendo su nombre, tipo y descripción:
| Nombre | Tipo | Descripción |
|---|---|---|
data | Propiedad (torch.Tensor) | Tensor de máscara binaria torch.uint8 con forma (N,H,W) y valores 0 o 1. |
cpu() | Método | Devuelve el tensor de máscaras en la memoria de la CPU. |
numpy() | Método | Devuelve el tensor de máscaras como una matriz NumPy. |
cuda() | Método | Devuelve el tensor de máscaras en la memoria de la GPU. |
to() | Método | Devuelve el tensor de máscaras con el dispositivo y dtype especificados. |
xyn | Propiedad (list[np.ndarray]) | Una lista de polígonos de máscara normalizados. |
xy | Propiedad (list[np.ndarray]) | Una lista de polígonos de máscara en coordenadas de píxeles. |
Para más detalles, consulta la documentación de la clase Masks.
Link to this sectionSemanticMask#
SemanticMask almacena un mapa de clase denso para resultados de segmentación semántica. A diferencia de Masks, no contiene una máscara binaria por objeto y no ofrece ayudas para polígonos.
from ultralytics import YOLO
# Load a pretrained YOLO26n-sem Semantic model
model = YOLO("yolo26n-sem.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/bus.jpg") # results list
# View results
for r in results:
print(r.semantic_mask.data) # print the H x W class-ID map| Nombre | Tipo | Descripción |
|---|---|---|
data | Propiedad (torch.Tensor) | Mapa de ID de clase con forma (H,W). El dtype es torch.uint8, torch.int16 o torch.int32, seleccionado según el recuento de clases. |
shape | Propiedad (tuple) | Forma del mapa de clases, que suele coincidir con result.orig_shape. |
cpu() | Método | Devuelve el tensor de máscara semántica en la memoria de la CPU. |
numpy() | Método | Devuelve el tensor de máscara semántica como una matriz NumPy. |
cuda() | Método | Devuelve el tensor de máscara semántica en la memoria de la GPU. |
to() | Método | Devuelve el tensor de máscara semántica con el dispositivo y dtype especificados. |
Link to this sectionPuntos clave#
El objeto Keypoints puede utilizarse para indexar, manipular y normalizar coordenadas.
from ultralytics import YOLO
# Load a pretrained YOLO26n-pose Pose model
model = YOLO("yolo26n-pose.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/bus.jpg") # results list
# View results
for r in results:
print(r.keypoints) # print the Keypoints object containing the detected keypointsAquí tienes una tabla con los métodos y propiedades de la clase Keypoints, incluyendo su nombre, tipo y descripción:
| Nombre | Tipo | Descripción |
|---|---|---|
cpu() | Método | Devuelve el tensor de puntos clave en la memoria de la CPU. |
numpy() | Método | Devuelve el tensor de puntos clave como una matriz NumPy. |
cuda() | Método | Devuelve el tensor de puntos clave en la memoria de la GPU. |
to() | Método | Devuelve el tensor de puntos clave con el dispositivo y dtype especificados. |
xyn | Propiedad (torch.Tensor) | Una lista de puntos clave normalizados representados como tensores. |
xy | Propiedad (torch.Tensor) | Una lista de puntos clave en coordenadas de píxeles representados como tensores. |
conf | Propiedad (torch.Tensor) | Devuelve los valores de confianza de los puntos clave si están disponibles, de lo contrario None. |
Para más detalles, consulta la documentación de la clase Keypoints.
Link to this sectionProbs#
El objeto Probs se puede usar para indexar, obtener los índices top1 y top5 y las puntuaciones de clasificación.
from ultralytics import YOLO
# Load a pretrained YOLO26n-cls Classify model
model = YOLO("yolo26n-cls.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/bus.jpg") # results list
# View results
for r in results:
print(r.probs) # print the Probs object containing the detected class probabilitiesAquí tienes una tabla que resume los métodos y propiedades de la clase Probs:
| Nombre | Tipo | Descripción |
|---|---|---|
cpu() | Método | Devuelve una copia del tensor probs en la memoria de la CPU. |
numpy() | Método | Devuelve una copia del tensor probs como un array de NumPy. |
cuda() | Método | Devuelve una copia del tensor probs en la memoria de la GPU. |
to() | Método | Devuelve una copia del tensor probs con el dispositivo y dtype especificados. |
top1 | Propiedad (int) | Índice de la clase top 1. |
top5 | Propiedad (list[int]) | Índices de las 5 clases principales. |
top1conf | Propiedad (torch.Tensor) | Confianza de la clase top 1. |
top5conf | Propiedad (torch.Tensor) | Confianzas de las 5 clases principales. |
Para más detalles, consulta la documentación de la clase Probs.
Link to this sectionOBB#
El objeto OBB se puede usar para indexar, manipular y convertir cajas delimitadoras orientadas a diferentes formatos.
from ultralytics import YOLO
# Load a pretrained YOLO26n model
model = YOLO("yolo26n-obb.pt")
# Run inference on an image
results = model("https://ultralytics.com/images/boats.jpg") # results list
# View results
for r in results:
print(r.obb) # print the OBB object containing the oriented detection bounding boxesAquí tienes una tabla con los métodos y propiedades de la clase OBB, incluyendo su nombre, tipo y descripción:
| Nombre | Tipo | Descripción |
|---|---|---|
cpu() | Método | Mueve el objeto a la memoria de la CPU. |
numpy() | Método | Convierte el objeto a una matriz NumPy. |
cuda() | Método | Mueve el objeto a la memoria CUDA. |
to() | Método | Mueve el objeto al dispositivo especificado. |
conf | Propiedad (torch.Tensor) | Devuelve los valores de confianza de las cajas. |
cls | Propiedad (torch.Tensor) | Devuelve los valores de clase de las cajas. |
id | Propiedad (torch.Tensor) | Devuelve los IDs de seguimiento de las cajas (si están disponibles). |
xyxy | Propiedad (torch.Tensor) | Devuelve las cajas horizontales en formato xyxy. |
xywhr | Propiedad (torch.Tensor) | Devuelve las cajas rotadas en formato xywhr. |
xyxyxyxy | Propiedad (torch.Tensor) | Devuelve las cajas rotadas en formato xyxyxyxy. |
xyxyxyxyn | Propiedad (torch.Tensor) | Devuelve las cajas rotadas en formato xyxyxyxy normalizadas por el tamaño de la imagen. |
Para más detalles, consulta la documentación de la clase OBB.
Link to this sectionVisualización de resultados#
El método plot() en objetos Results facilita la visualización de las predicciones superponiendo objetos detectados (como cajas delimitadoras, máscaras, puntos clave y probabilidades) sobre la imagen original. Este método devuelve la imagen anotada como un array de NumPy, lo que permite visualizarla o guardarla fácilmente.
from PIL import Image
from ultralytics import YOLO
# Load a pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Run inference on 'bus.jpg'
results = model(["https://ultralytics.com/images/bus.jpg", "https://ultralytics.com/images/zidane.jpg"]) # results list
# Visualize the results
for i, r in enumerate(results):
# Plot results image
im_bgr = r.plot() # BGR-order numpy array
im_rgb = Image.fromarray(im_bgr[..., ::-1]) # RGB-order PIL image
# Show results to screen (in supported environments)
r.show()
# Save results to disk
r.save(filename=f"results{i}.jpg")Link to this sectionParámetros del método plot()#
El método plot() admite varios argumentos para personalizar la salida:
| Argumento | Tipo | Descripción | Predeterminado |
|---|---|---|---|
conf | bool | Incluye puntuaciones de confianza de detección. | True |
line_width | float | Grosor de línea de las cajas delimitadoras. Se escala con el tamaño de la imagen si es None. | None |
font_size | float | Tamaño de fuente del texto. Se escala con el tamaño de la imagen si es None. | None |
font | str | Nombre de la fuente para las anotaciones de texto. | 'Arial.ttf' |
pil | bool | Devuelve la imagen como un objeto PIL Image. | False |
img | np.ndarray | Imagen alternativa para la visualización. Utiliza la imagen original si es None. | None |
im_gpu | torch.Tensor | Imagen acelerada por GPU para una visualización de máscaras más rápida. Forma: (1, 3, 640, 640). | None |
kpt_radius | int | Radio para los puntos clave dibujados. | 5 |
kpt_line | bool | Conecta los puntos clave con líneas. | True |
labels | bool | Incluye etiquetas de clase en las anotaciones. | True |
boxes | bool | Superpone cajas delimitadoras en la imagen. | True |
masks | bool | Superpone máscaras en la imagen. | True |
probs | bool | Incluye probabilidades de clasificación. | True |
show | bool | Muestra la imagen anotada directamente usando el visor de imágenes predeterminado. | False |
save | bool | Guarda la imagen anotada en un archivo especificado por filename. | False |
filename | str | Ruta y nombre del archivo donde guardar la imagen anotada si save es True. | None |
color_mode | str | Especifica el modo de color, p. ej., 'instance' o 'class'. | 'class' |
txt_color | tuple[int, int, int] | Color de texto BGR para la caja delimitadora y la etiqueta de clasificación de imagen. | (255, 255, 255) |
Link to this sectionInferencia segura para subprocesos#
Garantizar la seguridad de los hilos durante la inferencia es crucial cuando ejecutas múltiples modelos YOLO en paralelo a través de diferentes hilos. La inferencia segura para hilos garantiza que las predicciones de cada hilo estén aisladas y no interfieran entre sí, evitando condiciones de carrera y asegurando resultados consistentes y fiables.
Al usar modelos YOLO en una aplicación multihilo, es importante instanciar objetos de modelo separados para cada hilo o emplear almacenamiento local de hilos para evitar conflictos:
Instancia un único modelo dentro de cada hilo para una inferencia segura:
from threading import Thread
from ultralytics import YOLO
def thread_safe_predict(model, image_path):
"""Performs thread-safe prediction on an image using a locally instantiated YOLO model."""
model = YOLO(model)
results = model.predict(image_path)
# Process results
# Starting threads that each have their own model instance
Thread(target=thread_safe_predict, args=("yolo26n.pt", "image1.jpg")).start()
Thread(target=thread_safe_predict, args=("yolo26n.pt", "image2.jpg")).start()Para una visión detallada de la inferencia segura con modelos YOLO y pasos detallados, consulta nuestra Guía de Inferencia Segura de YOLO. Esta guía te proporcionará toda la información necesaria para evitar errores comunes y asegurar que tu inferencia multihilo se ejecute sin problemas.
Link to this sectionBucle for de fuente en streaming#
Aquí tienes un script de Python usando OpenCV (cv2) y YOLO para ejecutar inferencia en frames de video. Este script asume que ya has instalado los paquetes necesarios (opencv-python y ultralytics).
import cv2
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("yolo26n.pt")
# Open the video file
video_path = "path/to/your/video/file.mp4"
cap = cv2.VideoCapture(video_path)
# Loop through the video frames
while cap.isOpened():
# Read a frame from the video
success, frame = cap.read()
if success:
# Run YOLO inference on the frame
results = model(frame)
# Visualize the results on the frame
annotated_frame = results[0].plot()
# Display the annotated frame
cv2.imshow("YOLO Inference", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) & 0xFF == ord("q"):
break
else:
# Break the loop if the end of the video is reached
break
# Release the video capture object and close the display window
cap.release()
cv2.destroyAllWindows()Este script ejecutará predicciones en cada frame del video, visualizará los resultados y los mostrará en una ventana. Puedes salir del bucle presionando 'q'.
Link to this sectionFAQ#
Link to this section¿Qué es Ultralytics YOLO y su modo predict para inferencia en tiempo real?#
Ultralytics YOLO es un modelo de última generación para detección de objetos, segmentación de instancias, segmentación semántica y clasificación en tiempo real. Su modo predict permite a los usuarios realizar inferencia de alta velocidad en diversas fuentes de datos como imágenes, videos y transmisiones en vivo. Diseñado para ofrecer rendimiento y versatilidad, también ofrece modos de procesamiento por lotes y streaming. Para más detalles sobre sus características, consulta el modo predict de Ultralytics YOLO.
Link to this section¿Cómo puedo ejecutar la inferencia usando Ultralytics YOLO en diferentes fuentes de datos?#
Ultralytics YOLO puede procesar una amplia gama de fuentes de datos, incluyendo imágenes individuales, videos, directorios, URLs y streams. Puedes especificar la fuente de datos en la llamada model.predict(). Por ejemplo, usa 'image.jpg' para una imagen local o 'https://ultralytics.com/images/bus.jpg' para una URL. Consulta los ejemplos detallados para diversas fuentes de inferencia en la documentación.
Link to this section¿Cómo optimizo la velocidad de inferencia y el uso de memoria de YOLO?#
Para optimizar la velocidad de inferencia y gestionar la memoria de manera eficiente, puedes usar el modo streaming estableciendo stream=True en el método de llamada del predictor. El modo streaming genera un generador de objetos Results eficiente en memoria en lugar de cargar todos los frames en la RAM. Para procesar videos largos o grandes conjuntos de datos, el modo streaming es particularmente útil. Aprende más sobre el modo streaming.
Link to this section¿Qué argumentos de inferencia admite Ultralytics YOLO?#
El método model.predict() en YOLO admite varios argumentos como conf, iou, imgsz, device y otros. Estos argumentos te permiten personalizar el proceso de inferencia, estableciendo parámetros como umbrales de confianza, tamaño de imagen y el dispositivo utilizado para el cálculo. Encontrarás descripciones detalladas de estos argumentos en la sección de argumentos de inferencia.
Link to this section¿Cómo extraigo embeddings de un modelo YOLO?#
Usa model.embed(source) para extraer embeddings de características de la penúltima capa, o pasa embed=[layer_index] a model.predict() para elegir capas específicas.
from ultralytics import YOLO
model = YOLO("yolo26n.pt")
source = "https://ultralytics.com/images/bus.jpg"
results = model.predict(source) # Results objects
embeddings = model.embed(source) # list of torch.Tensor embeddingsLink to this section¿Cómo puedo visualizar y guardar los resultados de las predicciones de YOLO?#
Después de ejecutar la inferencia con YOLO, los objetos Results contienen métodos para mostrar y guardar imágenes anotadas. Puedes usar métodos como result.show() y result.save(filename="result.jpg") para visualizar y guardar los resultados. Cualquier directorio padre faltante en la ruta del nombre del archivo se crea automáticamente (p. ej., result.save("path/to/result.jpg")). Para obtener una lista completa de estos métodos, consulta la sección trabajar con resultados.