Advanced Data Visualization: Heatmaps using Ultralytics YOLO26 🚀
Introduction to Heatmaps
![]()
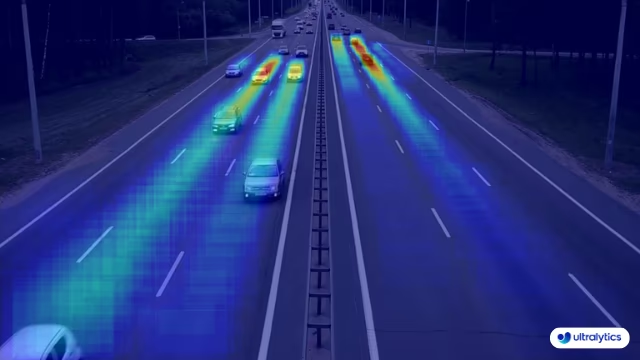
A heatmap generated with Ultralytics YOLO26 transforms complex data into a vibrant, color-coded matrix. This visual tool employs a spectrum of colors to represent varying data values, where warmer hues indicate higher intensities and cooler tones signify lower values. Heatmaps excel in visualizing intricate data patterns, correlations, and anomalies, offering an accessible and engaging approach to data interpretation across diverse domains.
Watch: Heatmaps using Ultralytics YOLO26
Why Choose Heatmaps for Data Analysis?
- Intuitive Data Distribution Visualization: Heatmaps simplify the comprehension of data concentration and distribution, converting complex datasets into easy-to-understand visual formats.
- Efficient Pattern Detection: By visualizing data in heatmap format, it becomes easier to spot trends, clusters, and outliers, facilitating quicker analysis and insights.
- Enhanced Spatial Analysis and Decision-Making: Heatmaps are instrumental in illustrating spatial relationships, aiding in decision-making processes in sectors such as business intelligence, environmental studies, and urban planning.
Real World Applications
| Transportation | Retail |
|---|---|
 |  |
| Ultralytics YOLO26 Transportation Heatmap | Ultralytics YOLO26 Retail Heatmap |
Heatmaps using Ultralytics YOLO
# Run a heatmap example
yolo solutions heatmap show=True
# Pass a source video
yolo solutions heatmap source="path/to/video.mp4"
# Pass a custom colormap
yolo solutions heatmap colormap=cv2.COLORMAP_INFERNO
# Heatmaps + object counting
yolo solutions heatmap region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("heatmap_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# For object counting with heatmap, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # rectangle region
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # polygon points
# Initialize heatmap object
heatmap = solutions.Heatmap(
show=True, # display the output
model="yolo26n.pt", # path to the YOLO26 model file
colormap=cv2.COLORMAP_PARULA, # colormap of heatmap
# region=region_points, # object counting with heatmaps, you can pass region_points
# classes=[0, 2], # generate heatmap for specific classes, e.g., person and car.
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = heatmap(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
Heatmap() Arguments
Here's a table with the Heatmap arguments:
| Argument | Type | Default | Description |
|---|---|---|---|
model | str | None | Path to an Ultralytics YOLO model file. |
colormap | int | cv2.COLORMAP_DEEPGREEN | Colormap to use for the heatmap. |
show_in | bool | True | Flag to control whether to display the in counts on the video stream. |
show_out | bool | True | Flag to control whether to display the out counts on the video stream. |
region | list | '[(20, 400), (1260, 400)]' | List of points defining the counting region. |
You can also apply different track arguments in the Heatmap solution.
| Argument | Type | Default | Description |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Specifies the tracking algorithm to use, e.g., bytetrack.yaml or botsort.yaml. |
conf | float | 0.1 | Sets the confidence threshold for detections; lower values allow more objects to be tracked but may include false positives. |
iou | float | 0.7 | Sets the Intersection over Union (IoU) threshold for filtering overlapping detections. |
classes | list | None | Filters results by class index. For example, classes=[0, 2, 3] only tracks the specified classes. |
verbose | bool | True | Controls the display of tracking results, providing a visual output of tracked objects. |
device | str | None | Specifies the device for inference (e.g., cpu, cuda:0 or 0). Allows users to select between CPU, a specific GPU, or other compute devices for model execution. |
Additionally, the supported visualization arguments are listed below:
| Argument | Type | Default | Description |
|---|---|---|---|
show | bool | False | If True, displays the annotated images or videos in a window. Useful for immediate visual feedback during development or testing. |
line_width | int or None | None | Specifies the line width of bounding boxes. If None, the line width is automatically adjusted based on the image size. Provides visual customization for clarity. |
show_conf | bool | True | Displays the confidence score for each detection alongside the label. Gives insight into the model's certainty for each detection. |
show_labels | bool | True | Displays labels for each detection in the visual output. Provides immediate understanding of detected objects. |
Heatmap COLORMAPs
| Colormap Name | Description |
|---|---|
cv::COLORMAP_AUTUMN | Autumn color map |
cv::COLORMAP_BONE | Bone color map |
cv::COLORMAP_JET | Jet color map |
cv::COLORMAP_WINTER | Winter color map |
cv::COLORMAP_RAINBOW | Rainbow color map |
cv::COLORMAP_OCEAN | Ocean color map |
cv::COLORMAP_SUMMER | Summer color map |
cv::COLORMAP_SPRING | Spring color map |
cv::COLORMAP_COOL | Cool color map |
cv::COLORMAP_HSV | HSV (Hue, Saturation, Value) color map |
cv::COLORMAP_PINK | Pink color map |
cv::COLORMAP_HOT | Hot color map |
cv::COLORMAP_PARULA | Parula color map |
cv::COLORMAP_MAGMA | Magma color map |
cv::COLORMAP_INFERNO | Inferno color map |
cv::COLORMAP_PLASMA | Plasma color map |
cv::COLORMAP_VIRIDIS | Viridis color map |
cv::COLORMAP_CIVIDIS | Cividis color map |
cv::COLORMAP_TWILIGHT | Twilight color map |
cv::COLORMAP_TWILIGHT_SHIFTED | Shifted Twilight color map |
cv::COLORMAP_TURBO | Turbo color map |
cv::COLORMAP_DEEPGREEN | Deep Green color map |
These colormaps are commonly used for visualizing data with different color representations.
How Heatmaps Work in Ultralytics YOLO26
The Heatmap solution in Ultralytics YOLO26 extends the ObjectCounter class to generate and visualize movement patterns in video streams. When initialized, the solution creates a blank heatmap layer that gets updated as objects move through the frame.
For each detected object, the solution:
- Tracks the object across frames using YOLO26's tracking capabilities
- Updates the heatmap intensity at the object's location
- Applies a selected colormap to visualize the intensity values
- Overlays the colored heatmap on the original frame
The result is a dynamic visualization that builds up over time, revealing traffic patterns, crowd movements, or other spatial behaviors in your video data.
FAQ
How does Ultralytics YOLO26 generate heatmaps and what are their benefits?
Ultralytics YOLO26 generates heatmaps by transforming complex data into a color-coded matrix where different hues represent data intensities. Heatmaps make it easier to visualize patterns, correlations, and anomalies in the data. Warmer hues indicate higher values, while cooler tones represent lower values. The primary benefits include intuitive visualization of data distribution, efficient pattern detection, and enhanced spatial analysis for decision-making. For more details and configuration options, refer to the Heatmap Configuration section.
Can I use Ultralytics YOLO26 to perform object tracking and generate a heatmap simultaneously?
Yes, Ultralytics YOLO26 supports object tracking and heatmap generation concurrently. This can be achieved through its Heatmap solution integrated with object tracking models. To do so, you need to initialize the heatmap object and use YOLO26's tracking capabilities. Here's a simple example:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(colormap=cv2.COLORMAP_PARULA, show=True, model="yolo26n.pt")
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
For further guidance, check the Tracking Mode page.
What makes Ultralytics YOLO26 heatmaps different from other data visualization tools like those from OpenCV or Matplotlib?
Ultralytics YOLO26 heatmaps are specifically designed for integration with its object detection and tracking models, providing an end-to-end solution for real-time data analysis. Unlike generic visualization tools like OpenCV or Matplotlib, YOLO26 heatmaps are optimized for performance and automated processing, supporting features like persistent tracking, decay factor adjustment, and real-time video overlay. For more information on YOLO26's unique features, visit the Ultralytics YOLO26 Introduction.
How can I visualize only specific object classes in heatmaps using Ultralytics YOLO26?
You can visualize specific object classes by specifying the desired classes in the track() method of the YOLO model. For instance, if you only want to visualize cars and persons (assuming their class indices are 0 and 2), you can set the classes parameter accordingly.
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(show=True, model="yolo26n.pt", classes=[0, 2])
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
Why should businesses choose Ultralytics YOLO26 for heatmap generation in data analysis?
Ultralytics YOLO26 offers seamless integration of advanced object detection and real-time heatmap generation, making it an ideal choice for businesses looking to visualize data more effectively. The key advantages include intuitive data distribution visualization, efficient pattern detection, and enhanced spatial analysis for better decision-making. Additionally, YOLO26's cutting-edge features such as persistent tracking, customizable colormaps, and support for various export formats make it superior to other tools like TensorFlow and OpenCV for comprehensive data analysis. Learn more about business applications at Ultralytics Plans.







