Speed Estimation using Ultralytics YOLO26 🚀
What is Speed Estimation?
Speed estimation is the process of calculating the rate of movement of an object within a given context, often employed in computer vision applications. Using Ultralytics YOLO26 you can now calculate the speed of objects using object tracking alongside distance and time data, crucial for tasks like traffic monitoring and surveillance. The accuracy of speed estimation directly influences the efficiency and reliability of various applications, making it a key component in the advancement of intelligent systems and real-time decision-making processes.
Watch: Speed Estimation using Ultralytics YOLO26
Check Out Our Blog
For deeper insights into speed estimation, check out our blog post: Ultralytics YOLO for Speed Estimation in Computer Vision Projects
Advantages of Speed Estimation
- Efficient Traffic Control: Accurate speed estimation aids in managing traffic flow, enhancing safety, and reducing congestion on roadways.
- Precise Autonomous Navigation: In autonomous systems like self-driving cars, reliable speed estimation ensures safe and accurate vehicle navigation.
- Enhanced Surveillance Security: Speed estimation in surveillance analytics helps identify unusual behaviors or potential threats, improving the effectiveness of security measures.
Real World Applications
| Transportation | Transportation |
|---|---|
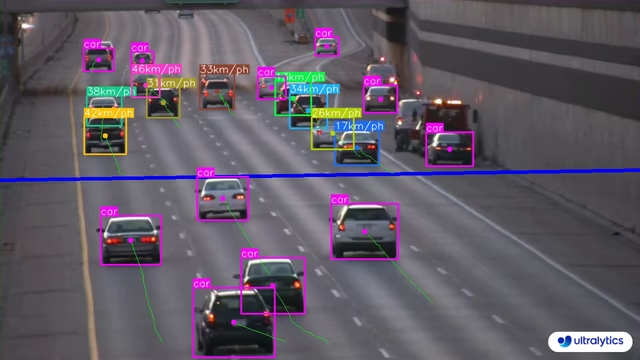 | 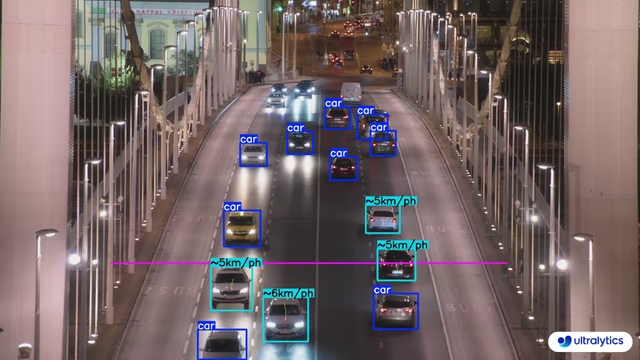 |
| Speed Estimation on Road using Ultralytics YOLO26 | Speed Estimation on Bridge using Ultralytics YOLO26 |
Speed is an Estimate
Speed will be an estimate and may not be completely accurate. Additionally, the estimation can vary on camera specifications and related factors.
Speed Estimation using Ultralytics YOLO
# Run a speed example
yolo solutions speed show=True
# Pass a source video
yolo solutions speed source="path/to/video.mp4"
# Adjust meter per pixel value based on camera configuration
yolo solutions speed meter_per_pixel=0.05
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("speed_management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize speed estimation object
speedestimator = solutions.SpeedEstimator(
show=True, # display the output
model="yolo26n.pt", # path to the YOLO26 model file.
fps=fps, # adjust speed based on frame per second
# max_speed=120, # cap speed to a max value (km/h) to avoid outliers
# max_hist=5, # minimum frames object tracked before computing speed
# meter_per_pixel=0.05, # highly depends on the camera configuration
# classes=[0, 2], # estimate speed of specific classes.
# line_width=2, # adjust the line width for bounding boxes
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = speedestimator(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
SpeedEstimator Arguments
Here's a table with the SpeedEstimator arguments:
| Argument | Type | Default | Description |
|---|---|---|---|
model | str | None | Path to an Ultralytics YOLO model file. |
fps | float | 30.0 | Frames per second used for speed calculations. |
max_hist | int | 5 | Maximum historical points to track per object for speed/direction calculations. |
meter_per_pixel | float | 0.05 | Scaling factor used for converting pixel distance to real-world units. |
max_speed | int | 120 | Maximum speed limit in visual overlays (used in alerts). |
The SpeedEstimator solution allows the use of track parameters:
| Argument | Type | Default | Description |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Specifies the tracking algorithm to use, e.g., bytetrack.yaml or botsort.yaml. |
conf | float | 0.1 | Sets the confidence threshold for detections; lower values allow more objects to be tracked but may include false positives. |
iou | float | 0.7 | Sets the Intersection over Union (IoU) threshold for filtering overlapping detections. |
classes | list | None | Filters results by class index. For example, classes=[0, 2, 3] only tracks the specified classes. |
verbose | bool | True | Controls the display of tracking results, providing a visual output of tracked objects. |
device | str | None | Specifies the device for inference (e.g., cpu, cuda:0 or 0). Allows users to select between CPU, a specific GPU, or other compute devices for model execution. |
Additionally, the following visualization options are supported:
| Argument | Type | Default | Description |
|---|---|---|---|
show | bool | False | If True, displays the annotated images or videos in a window. Useful for immediate visual feedback during development or testing. |
line_width | int or None | None | Specifies the line width of bounding boxes. If None, the line width is automatically adjusted based on the image size. Provides visual customization for clarity. |
show_conf | bool | True | Displays the confidence score for each detection alongside the label. Gives insight into the model's certainty for each detection. |
show_labels | bool | True | Displays labels for each detection in the visual output. Provides immediate understanding of detected objects. |
FAQ
How do I estimate object speed using Ultralytics YOLO26?
Estimating object speed with Ultralytics YOLO26 involves combining object detection and tracking techniques. First, you need to detect objects in each frame using the YOLO26 model. Then, track these objects across frames to calculate their movement over time. Finally, use the distance traveled by the object between frames and the frame rate to estimate its speed.
Example:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("speed_estimation.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize SpeedEstimator
speedestimator = solutions.SpeedEstimator(
model="yolo26n.pt",
show=True,
)
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = speedestimator(im0)
video_writer.write(results.plot_im)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
For more details, refer to our official blog post.
What are the benefits of using Ultralytics YOLO26 for speed estimation in traffic management?
Using Ultralytics YOLO26 for speed estimation offers significant advantages in traffic management:
- Enhanced Safety: Accurately estimate vehicle speeds to detect over-speeding and improve road safety.
- Real-Time Monitoring: Benefit from YOLO26's real-time object detection capability to monitor traffic flow and congestion effectively.
- Scalability: Deploy the model on various hardware setups, from edge devices to servers, ensuring flexible and scalable solutions for large-scale implementations.
For more applications, see advantages of speed estimation.
Can YOLO26 be integrated with other AI frameworks like TensorFlow or PyTorch?
Yes, YOLO26 can be integrated with other AI frameworks like TensorFlow and PyTorch. Ultralytics provides support for exporting YOLO26 models to various formats like ONNX, TensorRT, and CoreML, ensuring smooth interoperability with other ML frameworks.
To export a YOLO26 model to ONNX format:
yolo export model=yolo26n.pt format=onnx
Learn more about exporting models in our guide on export.
How accurate is the speed estimation using Ultralytics YOLO26?
The accuracy of speed estimation using Ultralytics YOLO26 depends on several factors, including the quality of the object tracking, the resolution and frame rate of the video, and environmental variables. While the speed estimator provides reliable estimates, it may not be 100% accurate due to variances in frame processing speed and object occlusion.
Note: Always consider margin of error and validate the estimates with ground truth data when possible.
For further accuracy improvement tips, check the Arguments SpeedEstimator section.








