Parking Management using Ultralytics YOLO26 🚀
What is Parking Management System?
Parking management with Ultralytics YOLO26 ensures efficient and safe parking by organizing spaces and monitoring availability. YOLO26 can improve parking lot management through real-time vehicle detection, and insights into parking occupancy.
Watch: How to Build a Parking Management System with Ultralytics YOLO26 | Real-Time Spot Detection 🚗
Advantages of Parking Management System
- Efficiency: Parking lot management optimizes the use of parking spaces and reduces congestion.
- Safety and Security: Parking management using YOLO26 improves the safety of both people and vehicles through surveillance and security measures.
- Reduced Emissions: Parking management using YOLO26 manages traffic flow to minimize idle time and emissions in parking lots.
Real World Applications
| Parking Management System | Parking Management System |
|---|---|
 |  |
| Parking management Aerial View using Ultralytics YOLO26 | Parking management Top View using Ultralytics YOLO26 |
Parking Management System Code Workflow
Points selection is now easy
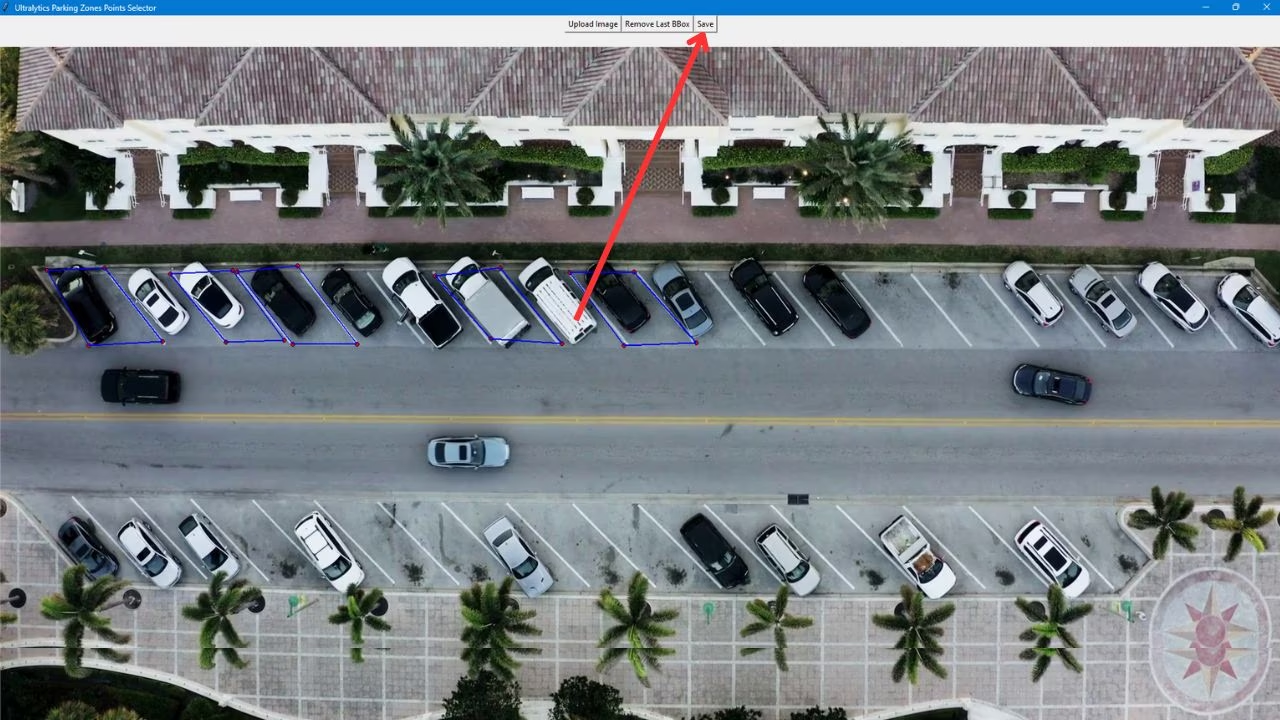
Choosing parking points is a critical and complex task in parking management systems. Ultralytics streamlines this process by providing a tool "Parking slots annotator" that lets you define parking lot areas, which can be utilized later for additional processing.
Step-1: Capture a frame from the video or camera stream where you want to manage the parking lot.
Step-2: Use the provided code to launch a graphical interface, where you can select an image and start outlining parking regions by mouse click to create polygons.
Parking slots annotator Ultralytics YOLO
Additional step for installing tkinter
Generally, tkinter comes pre-packaged with Python. However, if it did not, you can install it using the highlighted steps:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Arch:
sudo pacman -S tk - Windows: Reinstall Python and enable the checkbox
tcl/tk and IDLEon Optional Features during installation - MacOS: Reinstall Python from https://www.python.org/downloads/macos/ or
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Step-3: After defining the parking areas with polygons, click save to store a JSON file with the data in your working directory.
Step-4: You can now utilize the provided code for parking management with Ultralytics YOLO.
Parking Management using Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Note
Create parking zone annotations first using ParkingPtsSelection() in Python (Step 2 above), then pass the JSON file to the CLI command.
ParkingManagement Arguments
Here's a table with the ParkingManagement arguments:
| Argument | Type | Default | Description |
|---|---|---|---|
model | str | None | Path to an Ultralytics YOLO model file. |
json_file | str | None | Path to the JSON file that contains all parking coordinates data. |
The ParkingManagement solution allows the use of several track parameters:
| Argument | Type | Default | Description |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Specifies the tracking algorithm to use, e.g., bytetrack.yaml or botsort.yaml. |
conf | float | 0.1 | Sets the confidence threshold for detections; lower values allow more objects to be tracked but may include false positives. |
iou | float | 0.7 | Sets the Intersection over Union (IoU) threshold for filtering overlapping detections. |
classes | list | None | Filters results by class index. For example, classes=[0, 2, 3] only tracks the specified classes. |
verbose | bool | True | Controls the display of tracking results, providing a visual output of tracked objects. |
device | str | None | Specifies the device for inference (e.g., cpu, cuda:0 or 0). Allows users to select between CPU, a specific GPU, or other compute devices for model execution. |
Moreover, the following visualization options are supported:
| Argument | Type | Default | Description |
|---|---|---|---|
show | bool | False | If True, displays the annotated images or videos in a window. Useful for immediate visual feedback during development or testing. |
line_width | int or None | None | Specifies the line width of bounding boxes. If None, the line width is automatically adjusted based on the image size. Provides visual customization for clarity. |
FAQ
How does Ultralytics YOLO26 enhance parking management systems?
Ultralytics YOLO26 greatly enhances parking management systems by providing real-time vehicle detection and monitoring. This results in optimized usage of parking spaces, reduced congestion, and improved safety through continuous surveillance. The Parking Management System enables efficient traffic flow, minimizing idle times and emissions in parking lots, thereby contributing to environmental sustainability. For further details, refer to the parking management code workflow.
What are the benefits of using Ultralytics YOLO26 for smart parking?
Using Ultralytics YOLO26 for smart parking yields numerous benefits:
- Efficiency: Optimizes the use of parking spaces and decreases congestion.
- Safety and Security: Enhances surveillance and ensures the safety of vehicles and pedestrians.
- Environmental Impact: Helps reduce emissions by minimizing vehicle idle times. Explore more benefits in the Advantages of Parking Management System section.
How can I define parking spaces using Ultralytics YOLO26?
Defining parking spaces is straightforward with Ultralytics YOLO26:
- Capture a frame from a video or camera stream.
- Use the provided code to launch a GUI for selecting an image and drawing polygons to define parking spaces.
- Save the labeled data in JSON format for further processing. For comprehensive instructions, check the selection of points section above.
Can I customize the YOLO26 model for specific parking management needs?
Yes, Ultralytics YOLO26 allows customization for specific parking management needs. You can adjust parameters such as the occupied and available region colors, margins for text display, and much more. Utilizing the ParkingManagement class's arguments, you can tailor the model to suit your particular requirements, ensuring maximum efficiency and effectiveness.
What are some real-world applications of Ultralytics YOLO26 in parking lot management?
Ultralytics YOLO26 is utilized in various real-world applications for parking lot management, including:
- Parking Space Detection: Accurately identifying available and occupied spaces.
- Surveillance: Enhancing security through real-time monitoring.
- Traffic Flow Management: Reducing idle times and congestion with efficient traffic handling. Images showcasing these applications can be found in real-world applications.






