Gestione Parcheggi utilizzando Ultralytics YOLO26 🚀
Cos'è un sistema di gestione del parcheggio?
La gestione dei parcheggi con Ultralytics YOLO26 garantisce un parcheggio efficiente e sicuro organizzando gli spazi e monitorando la disponibilità. YOLO26 può migliorare la gestione dei parcheggi attraverso il rilevamento dei veicoli in tempo reale e approfondimenti sull'occupazione dei parcheggi.
Guarda: Come realizzare un sistema di gestione dei parcheggi con Ultralytics | Rilevamento in tempo reale dei posti liberi 🚗
Vantaggi del Sistema di Gestione del Parcheggio
- Efficienza: La gestione dei parcheggi ottimizza l'uso degli spazi e riduce la congestione.
- Sicurezza e Protezione: La gestione dei parcheggi tramite YOLO26 migliora la sicurezza sia delle persone che dei veicoli attraverso la sorveglianza e misure di sicurezza.
- Emissioni Ridotte: La gestione dei parcheggi tramite YOLO26 gestisce il flusso del traffico per minimizzare i tempi di inattività e le emissioni nei parcheggi.
Applicazioni nel mondo reale
| Sistema di gestione dei parcheggi | Sistema di gestione dei parcheggi |
|---|---|
 |  |
| Gestione dei parcheggi con Vista Aerea utilizzando Ultralytics YOLO26 | Gestione dei parcheggi con Vista dall'Alto utilizzando Ultralytics YOLO26 |
Workflow del codice del sistema di gestione del parcheggio
La selezione dei punti è ora più semplice
La scelta dei punti di parcheggio è un compito critico e complesso nei sistemi di gestione del parcheggio. Ultralytics semplifica questo processo fornendo uno strumento "Parking slots annotator" che consente di definire le aree del parcheggio, che possono essere utilizzate in seguito per ulteriori elaborazioni.
Passaggio 1: Acquisisci un frame dal video o dal flusso della telecamera in cui desideri gestire il parcheggio.
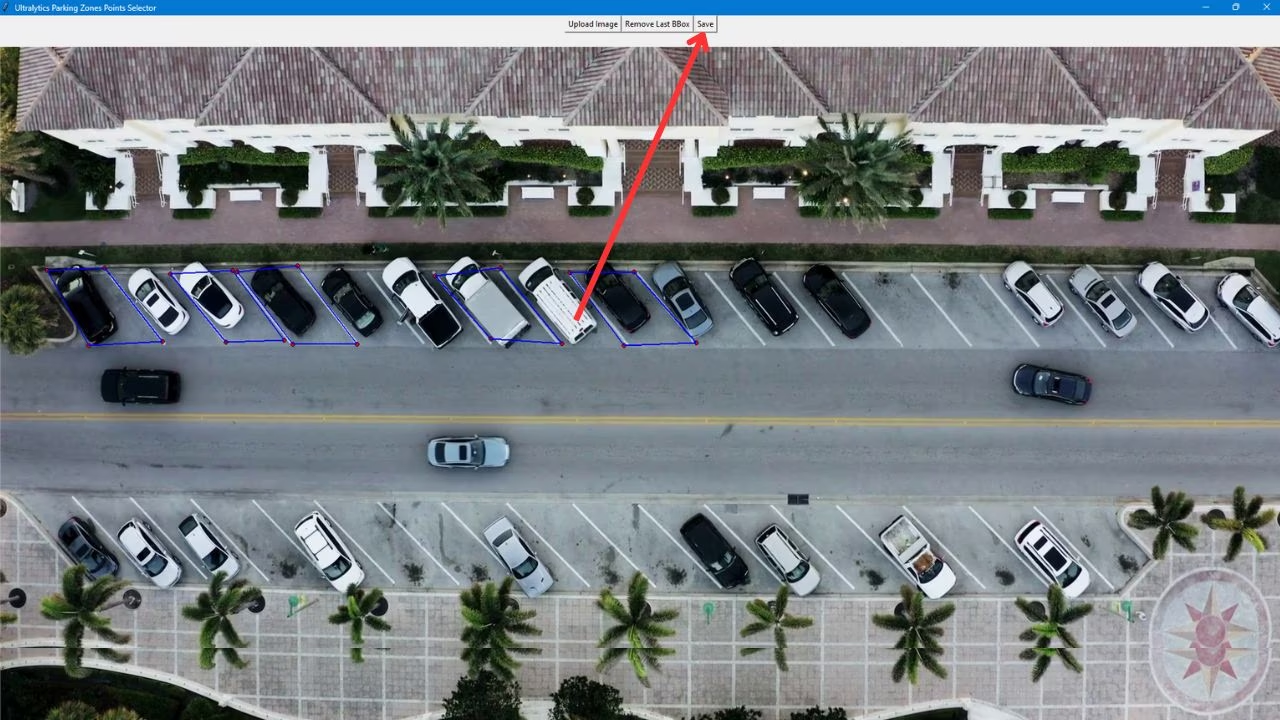
Passaggio 2: Utilizza il codice fornito per avviare un'interfaccia grafica, in cui puoi selezionare un'immagine e iniziare a delineare le aree di parcheggio con un clic del mouse per creare poligoni.
Annotatore di parcheggi Ultralytics YOLO
Passaggio aggiuntivo per l'installazione tkinter
Generalmente, tkinter viene preinstallato con Python. Tuttavia, se non lo fosse, è possibile installarlo seguendo i passaggi evidenziati:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Architettura:
sudo pacman -S tk - Windows: Reinstallare Python e abilitare la casella di controllo
tcl/tk and IDLEsu Funzionalità opzionali durante l'installazione - MacOS: Reinstallare Python da https://www.python.org/downloads/macos/ oppure
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Passaggio 3: Dopo aver definito le aree di parcheggio con dei poligoni, fare clic su save per memorizzare un file JSON con i dati nella directory di lavoro.
Passaggio 4: Ora puoi utilizzare il codice fornito per la gestione del parcheggio con Ultralytics YOLO.
Gestione del parcheggio tramite Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Nota
Crea prima le annotazioni relative alle zone di parcheggio utilizzando ParkingPtsSelection() in Python passaggio 2 sopra), quindi passare il file JSON al CLI .
ParkingManagement Argomenti
Ecco una tabella con i ParkingManagement argomenti:
| Argomento | Tipo | Predefinito | Descrizione |
|---|---|---|---|
model | str | None | Percorso di un file modello Ultralytics YOLO. |
json_file | str | None | Percorso del file JSON che contiene tutti i dati delle coordinate del parcheggio. |
Il ParkingManagement solution consente l'utilizzo di diversi track parametri:
| Argomento | Tipo | Predefinito | Descrizione |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Specifica l'algoritmo di tracking da utilizzare, ad esempio: bytetrack.yaml oppure botsort.yaml. |
conf | float | 0.1 | Imposta la soglia di confidenza per i rilevamenti; valori inferiori consentono di tracciare più oggetti, ma potrebbero includere falsi positivi. |
iou | float | 0.7 | Imposta la soglia Intersection over Union (IoU) per filtrare i detect sovrapposti. |
classes | list | None | Filtra i risultati per indice di classe. Per esempio, classes=[0, 2, 3] traccia solo le classi specificate. |
verbose | bool | True | Controlla la visualizzazione dei risultati del tracking, fornendo un output visivo degli oggetti tracciati. |
device | str | None | Specifica il dispositivo per l'inferenza (ad esempio, cpu, cuda:0 oppure 0). Consente agli utenti di scegliere tra CPU, una GPU specifica o altri dispositivi di calcolo per l'esecuzione del modello. |
Inoltre, sono supportate le seguenti opzioni di visualizzazione:
| Argomento | Tipo | Predefinito | Descrizione |
|---|---|---|---|
show | bool | False | Se True, visualizza le immagini o i video annotati in una finestra. Utile per un feedback visivo immediato durante lo sviluppo o il test. |
line_width | int or None | None | Specifica lo spessore della linea dei riquadri di delimitazione. Se None, lo spessore della linea viene regolato automaticamente in base alle dimensioni dell'immagine, fornendo una personalizzazione visiva per una maggiore chiarezza. |
FAQ
Come Ultralytics YOLO26 migliora i sistemi di gestione dei parcheggi?
Ultralytics YOLO26 migliora notevolmente i sistemi di gestione dei parcheggi fornendo il rilevamento dei veicoli in tempo reale e il monitoraggio. Ciò si traduce in un utilizzo ottimizzato degli spazi di parcheggio, una riduzione della congestione e una maggiore sicurezza attraverso la sorveglianza continua. Il Sistema di Gestione dei Parcheggi consente un flusso di traffico efficiente, minimizzando i tempi di inattività e le emissioni nei parcheggi, contribuendo così alla sostenibilità ambientale. Per maggiori dettagli, fare riferimento al flusso di lavoro del codice di gestione dei parcheggi.
Quali sono i vantaggi dell'utilizzo di Ultralytics YOLO26 per il parcheggio intelligente?
L'utilizzo di Ultralytics YOLO26 per il parcheggio intelligente offre numerosi vantaggi:
- Efficienza: Ottimizza l'uso dei parcheggi e riduce la congestione.
- Sicurezza: Migliora la sorveglianza e garantisce la sicurezza di veicoli e pedoni.
- Impatto Ambientale: Aiuta a ridurre le emissioni riducendo al minimo i tempi di inattività dei veicoli. Esplora ulteriori vantaggi nella sezione Vantaggi del sistema di gestione del parcheggio.
Come posso definire gli spazi di parcheggio utilizzando Ultralytics YOLO26?
Definire gli spazi di parcheggio è semplice con Ultralytics YOLO26:
- Acquisisci un frame da un video o da un flusso di telecamera.
- Utilizza il codice fornito per avviare una GUI per selezionare un'immagine e disegnare poligoni per definire i posti auto.
- Salva i dati etichettati in formato JSON per un'ulteriore elaborazione. Per istruzioni complete, consulta la sezione sulla selezione dei punti sopra.
È possibile personalizzare il modello YOLO26 per esigenze specifiche di gestione dei parcheggi?
Sì, Ultralytics YOLO26 consente la personalizzazione per esigenze specifiche di gestione dei parcheggi. È possibile regolare parametri come il colori delle regioni occupate e disponibili, margini per la visualizzazione del testo e molto altro. Utilizzando il ParkingManagement della classe argomenti, puoi adattare il modello per soddisfare le tue particolari esigenze, garantendo la massima efficienza ed efficacia.
Quali sono alcune applicazioni reali di Ultralytics YOLO26 nella gestione dei parcheggi?
Ultralytics YOLO26 è utilizzato in diverse applicazioni reali per la gestione dei parcheggi, tra cui:
- Rilevamento di Posti Auto: Identificazione accurata di spazi disponibili e occupati.
- Sorveglianza: Miglioramento della sicurezza attraverso il monitoraggio in tempo reale.
- Gestione del flusso di traffico: Riduzione dei tempi di inattività e della congestione con una gestione efficiente del traffico. Le immagini che mostrano queste applicazioni sono disponibili nelle applicazioni del mondo reale.






