高度なデータ視覚化: Ultralytics YOLO26を使用したヒートマップ 🚀
ヒートマップ入門
![]()
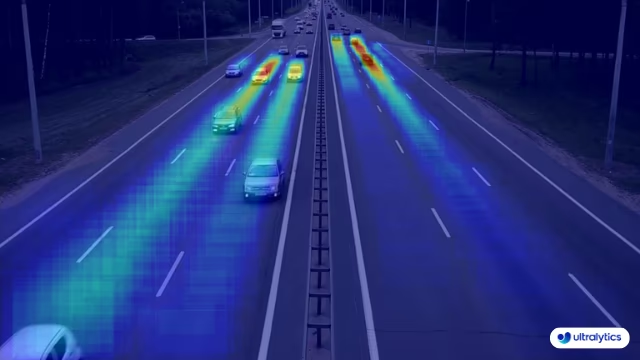
Ultralytics YOLO26で生成されたヒートマップは、複雑なデータを鮮やかで色分けされたマトリックスに変換します。この視覚ツールは、さまざまなデータ値を表現するために色のスペクトルを使用し、暖色系の色相は高い強度を示し、寒色系のトーンは低い値を示します。ヒートマップは、複雑なデータパターン、相関関係、異常の視覚化に優れており、多様なドメインにわたるデータ解釈に対して、アクセスしやすく魅力的なアプローチを提供します。
見る: Ultralytics YOLO26を使用したヒートマップ
データ分析にヒートマップを選ぶ理由
- 直感的なデータ分布の可視化: ヒートマップは、データの集中と分布の理解を簡素化し、複雑なデータセットを理解しやすい視覚形式に変換します。
- 効率的なパターン検出: データをヒートマップ形式で視覚化することにより、傾向、クラスター、外れ値を簡単に見つけることができ、迅速な分析と洞察が促進されます。
- 空間分析と意思決定の強化: ヒートマップは、空間的関係を示すのに役立ち、ビジネスインテリジェンス、環境研究、都市計画などの分野での意思決定プロセスを支援します。
現実世界のアプリケーション
| 輸送 | 小売 |
|---|---|
 |  |
| Ultralytics YOLO26 交通ヒートマップ | Ultralytics YOLO26 小売ヒートマップ |
Ultralytics YOLOを使用したヒートマップ
# Run a heatmap example
yolo solutions heatmap show=True
# Pass a source video
yolo solutions heatmap source="path/to/video.mp4"
# Pass a custom colormap
yolo solutions heatmap colormap=cv2.COLORMAP_INFERNO
# Heatmaps + object counting
yolo solutions heatmap region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("heatmap_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# For object counting with heatmap, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # rectangle region
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # polygon points
# Initialize heatmap object
heatmap = solutions.Heatmap(
show=True, # display the output
model="yolo26n.pt", # path to the YOLO26 model file
colormap=cv2.COLORMAP_PARULA, # colormap of heatmap
# region=region_points, # object counting with heatmaps, you can pass region_points
# classes=[0, 2], # generate heatmap for specific classes, e.g., person and car.
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = heatmap(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
Heatmap() 引数
の表を以下に示します。 Heatmap 引数:
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
model | str | None | Ultralytics YOLOモデルファイルへのパス。 |
colormap | int | cv2.COLORMAP_DEEPGREEN | ヒートマップに使用するカラーマップ。 |
show_in | bool | True | ビデオストリームにカウントを表示するかどうかを制御するフラグ。 |
show_out | bool | True | ビデオストリーム上にアウトカウントを表示するかどうかを制御するフラグ。 |
region | list | '[(20, 400), (1260, 400)]' | カウント領域を定義する点のリスト。 |
さまざまなものを適用することもできます。 track の引数 Heatmap ソリューション。
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
tracker | str | 'botsort.yaml' | 使用する追跡アルゴリズムを指定します。例: bytetrack.yaml または botsort.yaml. |
conf | float | 0.1 | 検出の信頼度閾値を設定します。低い値を設定すると、より多くのオブジェクトを追跡できますが、誤検出が含まれる可能性があります。 |
iou | float | 0.7 | 重複する検出をフィルタリングするためのIntersection over Union (IoU) 閾値を設定します。 |
classes | list | None | クラスインデックスで結果をフィルタリングします。例: classes=[0, 2, 3] 指定されたクラスのみを追跡します。 |
verbose | bool | True | 追跡結果の表示を制御し、追跡されたオブジェクトの視覚的な出力を提供します。 |
device | str | None | 推論に使用するデバイスを指定します(例: cpu, cuda:0 または 0)。モデル実行のために、CPU、特定のGPU、またはその他の計算デバイスを選択できます。 |
さらに、サポートされている可視化引数は以下のとおりです。
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
show | bool | False | もし True)は、アノテーションが付けられた画像またはビデオをウィンドウに表示します。開発またはテスト中に、視覚的なフィードバックを即座に得るのに役立ちます。 |
line_width | int or None | None | バウンディングボックスの線の太さを指定します。もし None場合、線の太さは画像サイズに基づいて自動的に調整されます。明確にするための視覚的なカスタマイズを提供します。 |
show_conf | bool | True | ラベルとともに、検出ごとの信頼度スコアを表示します。各検出に対するモデルの確実性についての洞察が得られます。 |
show_labels | bool | True | 検出された各オブジェクトのラベルを視覚的な出力に表示します。検出されたオブジェクトをすぐに理解できます。 |
ヒートマップ COLORMAP
| カラーマップ名 | 説明 |
|---|---|
cv::COLORMAP_AUTUMN | 秋のカラーマップ |
cv::COLORMAP_BONE | 骨のカラーマップ |
cv::COLORMAP_JET | ジェットカラーマップ |
cv::COLORMAP_WINTER | Winterカラーマップ |
cv::COLORMAP_RAINBOW | レインボーカラーマップ |
cv::COLORMAP_OCEAN | 海洋カラーマップ |
cv::COLORMAP_SUMMER | サマーカラーマップ |
cv::COLORMAP_SPRING | スプリングカラーマップ |
cv::COLORMAP_COOL | クールなカラーマップ |
cv::COLORMAP_HSV | HSV(色相、彩度、明度)カラーマップ |
cv::COLORMAP_PINK | ピンクのカラーマップ |
cv::COLORMAP_HOT | ホットカラーマップ |
cv::COLORMAP_PARULA | Parulaカラーマップ |
cv::COLORMAP_MAGMA | Magmaカラーマップ |
cv::COLORMAP_INFERNO | Infernoカラーマップ |
cv::COLORMAP_PLASMA | プラズマカラーマップ |
cv::COLORMAP_VIRIDIS | Viridisカラーマップ |
cv::COLORMAP_CIVIDIS | Cividisカラーマップ |
cv::COLORMAP_TWILIGHT | Twilight カラーマップ |
cv::COLORMAP_TWILIGHT_SHIFTED | シフトされたトワイライトカラーマップ |
cv::COLORMAP_TURBO | Turbo カラーマップ |
cv::COLORMAP_DEEPGREEN | 深緑色のカラーマップ |
これらのカラーマップは、異なる色の表現でデータを視覚化するためによく使用されます。
Ultralytics YOLO26におけるヒートマップの仕組み
Ultralytics YOLO26のヒートマップソリューションは、ObjectCounterクラスを拡張し、ビデオストリーム内の移動パターンを生成および可視化します。初期化されると、このソリューションは空白のヒートマップレイヤーを作成し、オブジェクトがフレーム内を移動するにつれて更新されます。
検出された各オブジェクトに対するソリューション:
- YOLO26のトラッキング機能を使用して、フレーム間でオブジェクトを追跡します。
- オブジェクトの位置でのヒートマップの強度を更新します
- 選択したカラーマップを適用して、強度値を可視化します。
- 色付きのヒートマップを元のフレームに重ねます
その結果、時間の経過とともに構築される動的な視覚化が実現し、ビデオデータ内の交通パターン、群衆の動き、またはその他の空間的挙動が明らかになります。
よくある質問
Ultralytics YOLO26はどのようにヒートマップを生成し、その利点は何ですか?
Ultralytics YOLO26は、複雑なデータを、異なる色相がデータ強度を表すカラーコード化されたマトリックスに変換することで、ヒートマップを生成します。ヒートマップは、データ内のパターン、相関関係、異常を視覚化しやすくします。暖色系の色相は高い値を、寒色系の色相は低い値を表します。主な利点としては、データ分布の直感的な可視化、効率的なパターン検出、意思決定のための高度な空間分析が挙げられます。詳細および設定オプションについては、ヒートマップ設定セクションを参照してください。
Ultralytics YOLO26を使用して、物体追跡とヒートマップ生成を同時に実行できますか?
はい、Ultralytics YOLO26はオブジェクトトラッキングとヒートマップ生成を同時にサポートしています。これは、その Heatmap オブジェクトトラッキングモデルと統合されたソリューションを通じて実現できます。そのためには、ヒートマップオブジェクトを初期化し、YOLO26のトラッキング機能を使用する必要があります。簡単な例を以下に示します。
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(colormap=cv2.COLORMAP_PARULA, show=True, model="yolo26n.pt")
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
詳細なガイダンスについては、トラッキングモードのページをご確認ください。
Ultralytics YOLO26のヒートマップは、OpenCVやMatplotlibのような他のデータ可視化ツールと何が違うのですか?
Ultralytics YOLO26のヒートマップは、その物体検出およびトラッキングモデルとの統合のために特別に設計されており、リアルタイムデータ分析のためのエンドツーエンドソリューションを提供します。OpenCVやMatplotlibのような汎用的な可視化ツールとは異なり、YOLO26のヒートマップは、パフォーマンスと自動処理に最適化されており、永続的なトラッキング、減衰係数調整、リアルタイムビデオオーバーレイなどの機能をサポートしています。YOLO26の独自の機能に関する詳細については、Ultralytics YOLO26の紹介をご覧ください。
Ultralytics YOLO26を使用して、ヒートマップで特定の物体クラスのみを視覚化するにはどうすればよいですか?
特定のオブジェクトクラスを視覚化するには、 track() YOLOモデルのメソッド。たとえば、クラスインデックスが0と2の車と人物のみを可視化したい場合は、以下のように設定できます。 classes パラメータを適宜調整してください。
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(show=True, model="yolo26n.pt", classes=[0, 2])
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
企業はデータ分析におけるヒートマップ生成のために、なぜUltralytics YOLO26を選択すべきですか?
Ultralytics YOLO26は、高度な物体検出とリアルタイムヒートマップ生成のシームレスな統合を提供し、データをより効果的に視覚化したい企業にとって理想的な選択肢となります。主な利点としては、直感的なデータ分布の可視化、効率的なパターン検出、およびより良い意思決定のための高度な空間分析が挙げられます。さらに、YOLO26の永続的なトラッキング、カスタマイズ可能なカラーマップ、多様なエクスポート形式のサポートといった最先端の機能は、包括的なデータ分析においてTensorFlowやOpenCVのような他のツールよりも優れています。ビジネスアプリケーションの詳細については、Ultralyticsプランをご覧ください。







