Ultralytics YOLO26 を使用した駐車場管理 🚀
駐車場管理システムとは何ですか?
Ultralytics YOLO26による駐車場管理は、スペースを整理し、空き状況を監視することで、効率的で安全な駐車を保証します。YOLO26は、リアルタイムの車両detectと駐車場の占有状況に関する洞察を通じて、駐車場管理を改善できます。
見る: Ultralytics を使った駐車管理システムの構築方法 | リアルタイムの駐車スペース検知 🚗
駐車場管理システムの利点
- 効率: 駐車場管理は、駐車スペースの利用を最適化し、混雑を軽減します。
- 安全性とセキュリティ: YOLO26を使用した駐車場管理は、監視とセキュリティ対策を通じて、人々と車両の両方の安全性を向上させます。
- 排出量の削減: YOLO26を使用した駐車場管理は、交通の流れを管理し、駐車場でのアイドリング時間と排出量を最小限に抑えます。
現実世界のアプリケーション
| 駐車場管理システム | 駐車場管理システム |
|---|---|
 |  |
| Ultralytics YOLO26を使用した駐車場管理(航空写真) | Ultralytics YOLO26を使用した駐車場管理(トップビュー) |
駐車場管理システムのコードワークフロー
ポイントの選択が容易になりました
駐車ポイントの選択は、駐車場管理システムにおいて重要かつ複雑なタスクです。Ultralyticsは、「駐車スロットアノテーター」というツールを提供することで、このプロセスを効率化します。このツールを使用すると、駐車場エリアを定義でき、後で追加の処理に利用できます。
ステップ1: 駐車場を管理したいビデオまたはカメラストリームからフレームをキャプチャします。
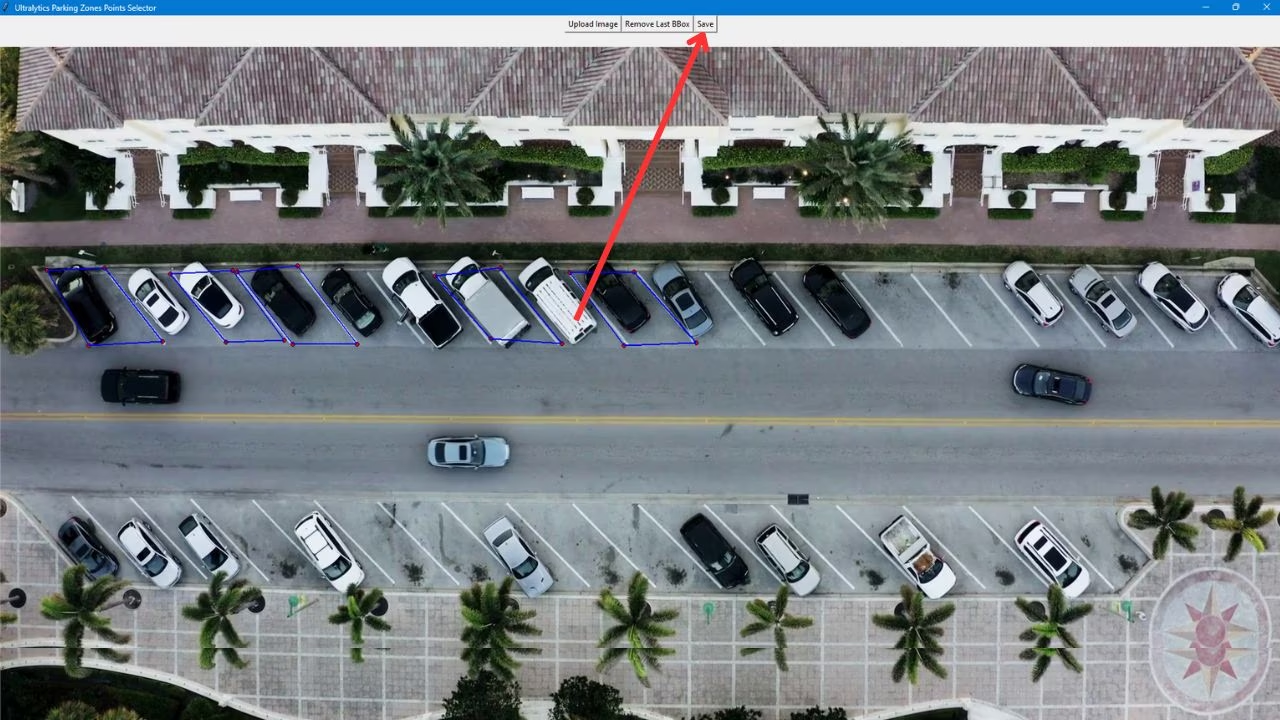
ステップ2: 提供されたコードを使用してグラフィカルインターフェースを起動し、画像を選択してマウスをクリックして駐車場領域をアウトラインし、ポリゴンを作成します。
Ultralytics YOLOによる駐車スペースのアノテーション
インストールに関する追加の手順 tkinter
一般的に、 tkinter Pythonには標準で付属しています。もし付属していない場合は、強調表示されている手順でインストールできます。
- Linux:(Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - アーキテクチャ:
sudo pacman -S tk - Windows: python を再インストールし、チェックボックスをオンにします。
tcl/tk and IDLEオン オプション機能 インストール中 - MacOS: python を以下から再インストール: https://www.python.org/downloads/macos/ または
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
ステップ3: ポリゴンで駐車エリアを定義した後、クリックします。 save データを格納したJSONファイルを作業ディレクトリに保存するには。
ステップ4: Ultralytics YOLOを使用した駐車場管理に、提供されたコードを利用できるようになります。
Ultralytics YOLOを使用した駐車場管理
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
注
まず、以下のコマンドを使用して駐車ゾーンの注釈を作成します ParkingPtsSelection() Python でPython 上記のステップ2)、JSONファイルをCLI に渡します。
ParkingManagement 引数
の表を以下に示します。 ParkingManagement 引数:
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
model | str | None | Ultralytics YOLOモデルファイルへのパス。 |
json_file | str | None | すべての駐車座標データを含むJSONファイルへのパス。 |
The ParkingManagement ソリューションでは、いくつかの以下を使用できます。 track パラメータ:
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
tracker | str | 'botsort.yaml' | 使用する追跡アルゴリズムを指定します。例: bytetrack.yaml または botsort.yaml. |
conf | float | 0.1 | 検出の信頼度閾値を設定します。低い値を設定すると、より多くのオブジェクトを追跡できますが、誤検出が含まれる可能性があります。 |
iou | float | 0.7 | 重複する検出をフィルタリングするためのIntersection over Union (IoU) 閾値を設定します。 |
classes | list | None | クラスインデックスで結果をフィルタリングします。例: classes=[0, 2, 3] 指定されたクラスのみを追跡します。 |
verbose | bool | True | 追跡結果の表示を制御し、追跡されたオブジェクトの視覚的な出力を提供します。 |
device | str | None | 推論に使用するデバイスを指定します(例: cpu, cuda:0 または 0)。モデル実行のために、CPU、特定のGPU、またはその他の計算デバイスを選択できます。 |
さらに、以下の可視化オプションがサポートされています:
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
show | bool | False | もし True)は、アノテーションが付けられた画像またはビデオをウィンドウに表示します。開発またはテスト中に、視覚的なフィードバックを即座に得るのに役立ちます。 |
line_width | int or None | None | バウンディングボックスの線の太さを指定します。もし None場合、線の太さは画像サイズに基づいて自動的に調整されます。明確にするための視覚的なカスタマイズを提供します。 |
よくある質問
Ultralytics YOLO26は駐車場管理システムをどのように強化しますか?
Ultralytics YOLO26は、リアルタイム車両detectと監視を提供することで、駐車場管理システムを大幅に強化します。これにより、駐車スペースの最適化、渋滞の緩和、継続的な監視による安全性の向上が実現します。駐車場管理システムは、効率的な交通の流れを可能にし、駐車場でのアイドリング時間と排出量を最小限に抑えることで、環境持続可能性に貢献します。詳細については、駐車場管理コードワークフローを参照してください。
スマートパーキングにUltralytics YOLO26を使用する利点は何ですか?
Ultralytics YOLO26をスマートパーキングに利用することで、数多くの利点が得られます。
- 効率: 駐車スペースの利用を最適化し、混雑を緩和します。
- 安全性とセキュリティ: 監視を強化し、車両と歩行者の安全を確保します。
- 環境への影響: 車両のアイドリング時間を最小限に抑えることで、排出量の削減に貢献します。詳細については、駐車場管理システムの利点セクションをご覧ください。
Ultralytics YOLO26を使用して駐車スペースを定義するにはどうすればよいですか?
Ultralytics YOLO26を使用すると、駐車スペースの定義は簡単です。
- ビデオまたはカメラのストリームからフレームをキャプチャします。
- 提供されたコードを使用してGUIを起動し、画像を選択してポリゴンを描画し、駐車スペースを定義します。
- ラベル付けされたデータをJSON形式で保存して、さらに処理します。詳細な手順については、上記のポイントの選択に関するセクションを確認してください。
特定の駐車場管理ニーズに合わせてYOLO26モデルをカスタマイズできますか?
はい、Ultralytics YOLO26は特定の駐車場管理ニーズに合わせてカスタマイズが可能です。以下のようなパラメータを調整できます。 占有領域と利用可能領域の色、テキスト表示のマージンなど、他にもたくさんあります。以下を活用します。 ParkingManagement クラスの 引数、特定の要件に合わせてモデルを調整し、最大限の効率と効果を確保できます。
Ultralytics YOLO26の駐車場管理における実世界での応用例にはどのようなものがありますか?
Ultralytics YOLO26は、駐車場管理のための様々な実世界アプリケーションで活用されており、以下が含まれます。
- 駐車スペース検出: 利用可能なスペースと占有されているスペースを正確に識別します。
- 監視: リアルタイム監視によるセキュリティの強化。
- 交通流管理:効率的な交通処理により、アイドル時間と輻輳を削減します。これらのアプリケーションを紹介する画像は、実際のアプリケーションにあります。






