Ultralytics YOLO26を使用したワークアウト監視
![]()
姿勢推定を介したUltralytics YOLO26によるワークアウトのモニタリングは、主要な身体のランドマークと関節をリアルタイムで正確にtrackすることで、エクササイズの評価を向上させます。この技術は、エクササイズフォームに関する即時フィードバックを提供し、ワークアウトルーチンをtrackし、パフォーマンスメトリクスを測定することで、ユーザーとトレーナー双方のトレーニングセッションを最適化します。
見る: Ultralytics YOLOを使用したワークアウトエクササイズの監視方法 | スクワット、レッグエクステンション、腕立て伏せなど
ワークアウトモニタリングの利点
- 最適化されたパフォーマンス: より良い結果を得るために、監視データに基づいてトレーニングを調整します。
- 目標達成: 測定可能な進捗のために、フィットネス目標を追跡および調整します。
- パーソナライゼーション: 効果を高めるために、個々のデータに基づいたカスタマイズされたワークアウトプラン。
- 健康状態の認識: 健康上の問題やオーバートレーニングを示すパターンの早期検出。
- 情報に基づいた意思決定: ルーチンを調整し、現実的な目標を設定するためのデータ駆動型の意思決定。
現実世界のアプリケーション
| ワークアウトのモニタリング | ワークアウトのモニタリング |
|---|---|
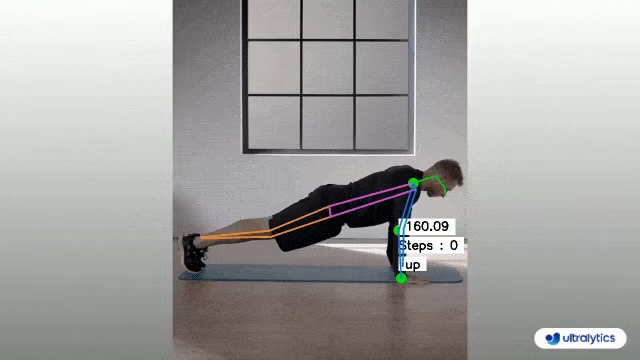 | 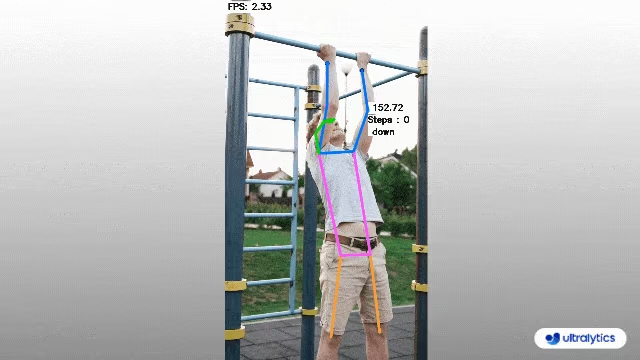 |
| PushUpsのカウント | PullUpsのカウント |
Ultralytics YOLO を使用したワークアウトモニタリング
# Run a workout example
yolo solutions workout show=True
# Pass a source video
yolo solutions workout source="path/to/video.mp4"
# Use keypoints for pushups
yolo solutions workout kpts="[6, 8, 10]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("workouts_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Init AIGym
gym = solutions.AIGym(
show=True, # display the frame
kpts=[6, 8, 10], # keypoints for monitoring specific exercise, by default it's for pushup
model="yolo26n-pose.pt", # path to the YOLO26 pose estimation model file
# line_width=2, # adjust the line width for bounding boxes and text display
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = gym(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
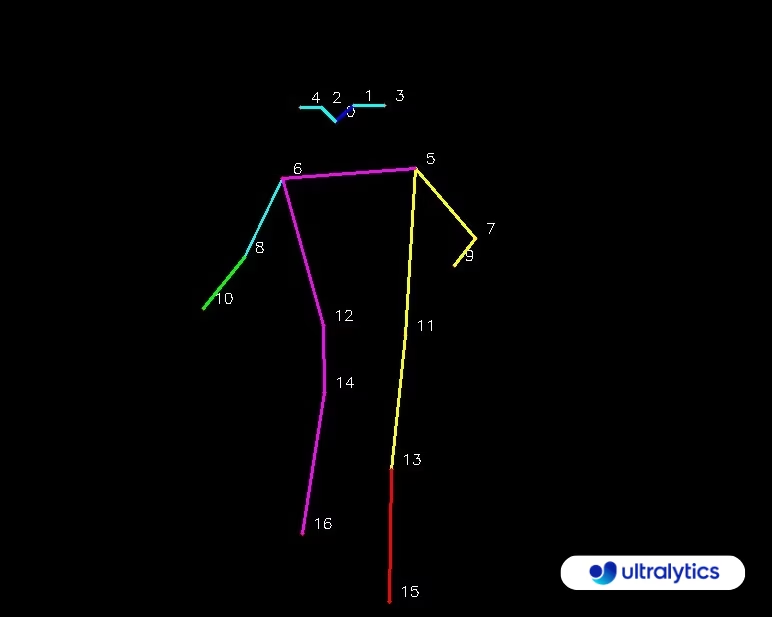
キーポイントマップ
AIGym 引数
の表を以下に示します。 AIGym 引数:
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
model | str | None | Ultralytics YOLOモデルファイルへのパス。 |
up_angle | float | 145.0 | 「アップ」ポーズの角度閾値。 |
down_angle | int | 90 | 「ダウン」ポーズの角度閾値。 |
kpts | list[int] | '[6, 8, 10]' | ワークアウトの監視に使用される3つのキーポイントインデックスのリスト。これらのキーポイントは、プッシュアップ、プルアップ、スクワット、腹筋運動などのエクササイズにおいて、肩、肘、手首などの体の関節または部位に対応します。 |
The AIGym ソリューションは、さまざまなオブジェクト追跡パラメータもサポートしています。
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
tracker | str | 'botsort.yaml' | 使用する追跡アルゴリズムを指定します。例: bytetrack.yaml または botsort.yaml. |
conf | float | 0.1 | 検出の信頼度閾値を設定します。低い値を設定すると、より多くのオブジェクトを追跡できますが、誤検出が含まれる可能性があります。 |
iou | float | 0.7 | 重複する検出をフィルタリングするためのIntersection over Union (IoU) 閾値を設定します。 |
classes | list | None | クラスインデックスで結果をフィルタリングします。例: classes=[0, 2, 3] 指定されたクラスのみを追跡します。 |
verbose | bool | True | 追跡結果の表示を制御し、追跡されたオブジェクトの視覚的な出力を提供します。 |
device | str | None | 推論に使用するデバイスを指定します(例: cpu, cuda:0 または 0)。モデル実行のために、CPU、特定のGPU、またはその他の計算デバイスを選択できます。 |
さらに、以下の可視化設定を適用できます。
| 引数 | 種類 | デフォルト | 説明 |
|---|---|---|---|
show | bool | False | もし True)は、アノテーションが付けられた画像またはビデオをウィンドウに表示します。開発またはテスト中に、視覚的なフィードバックを即座に得るのに役立ちます。 |
line_width | int or None | None | バウンディングボックスの線の太さを指定します。もし None場合、線の太さは画像サイズに基づいて自動的に調整されます。明確にするための視覚的なカスタマイズを提供します。 |
show_conf | bool | True | ラベルとともに、検出ごとの信頼度スコアを表示します。各検出に対するモデルの確実性についての洞察が得られます。 |
show_labels | bool | True | 検出された各オブジェクトのラベルを視覚的な出力に表示します。検出されたオブジェクトをすぐに理解できます。 |
よくある質問
Ultralytics YOLO26を使用してワークアウトをどのように監視しますか?
Ultralytics YOLO26を使用してワークアウトをモニタリングするには、姿勢推定機能を活用して、主要な身体のランドマークと関節をリアルタイムでtrackおよび分析できます。これにより、エクササイズフォームに関する即時フィードバックを受け取り、繰り返し回数をカウントし、パフォーマンスメトリクスを測定できます。以下に示すように、プッシュアップ、プルアップ、または腹筋運動の提供されているサンプルコードを使用することから始めることができます。
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
gym = solutions.AIGym(
line_width=2,
show=True,
kpts=[6, 8, 10],
)
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = gym(im0)
cv2.destroyAllWindows()
カスタマイズおよび設定の詳細については、ドキュメントのAIGymセクションを参照してください。
Ultralytics YOLO26をワークアウトのモニタリングに使用する利点は何ですか?
Ultralytics YOLO26をワークアウトのモニタリングに使用することには、いくつかの主要な利点があります。
- 最適化されたパフォーマンス: 監視データに基づいてトレーニングを調整することで、より良い結果を得ることができます。
- 目標達成: 測定可能な進捗のために、フィットネス目標を簡単にtrackし、調整します。
- パーソナライゼーション: 最適な効果を得るために、個々のデータに基づいたカスタマイズされたワークアウトプランを入手してください。
- 健康状態の認識: 健康上の問題やオーバートレーニングの可能性を示すパターンの早期検出。
- 情報に基づいた意思決定: データに基づいた意思決定を行い、ルーチンを調整し、現実的な目標を設定します。
これらの利点を実際に確認するには、YouTubeのデモビデオをご覧ください。
Ultralytics YOLO26はエクササイズのdetectおよびtrackにおいてどの程度の精度がありますか?
Ultralytics YOLO26は、最先端の姿勢推定機能により、エクササイズのdetectおよびtrackにおいて非常に高い精度を誇ります。主要な身体のランドマークと関節を正確にtrackし、エクササイズフォームとパフォーマンスメトリクスに関するリアルタイムのフィードバックを提供します。モデルの事前学習済み重みと堅牢なアーキテクチャは、高い精度と信頼性を保証します。実際の例については、ドキュメントの実世界アプリケーションセクションを参照してください。そこでは、プッシュアップとプルアップのカウントが紹介されています。
Ultralytics YOLO26をカスタムワークアウトルーチンに使用できますか?
はい、Ultralytics YOLO26はカスタムワークアウトルーチンに適合させることができます。その AIGym クラスは、次のようなさまざまなポーズタイプをサポートしています。 pushup, pullup、および abworkout。特定の運動をdetectするために、キーポイントと角度を指定できます。以下に設定例を示します。
from ultralytics import solutions
gym = solutions.AIGym(
line_width=2,
show=True,
kpts=[6, 8, 10], # For pushups - can be customized for other exercises
)
引数の設定に関する詳細については、 引数 AIGym セクションを参照してください。この柔軟性により、さまざまなエクササイズを監視し、あなたのルーチンをカスタマイズできます。 フィットネス目標.
Ultralytics YOLO26を使用してワークアウトモニタリングの出力を保存するにはどうすればよいですか?
ワークアウトのモニタリング出力を保存するには、処理されたフレームを保存するビデオライターを含めるようにコードを変更できます。以下に例を示します。
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("workouts.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
gym = solutions.AIGym(
line_width=2,
show=True,
kpts=[6, 8, 10],
)
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = gym(im0)
video_writer.write(results.plot_im)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
このセットアップでは、監視対象のビデオを出力ファイルに書き込むため、後でワークアウトのパフォーマンスを確認したり、トレーナーと共有して追加のフィードバックを得たりすることができます。





