Link to this sectionYOLOv7: Trainable Bag-of-Freebies#
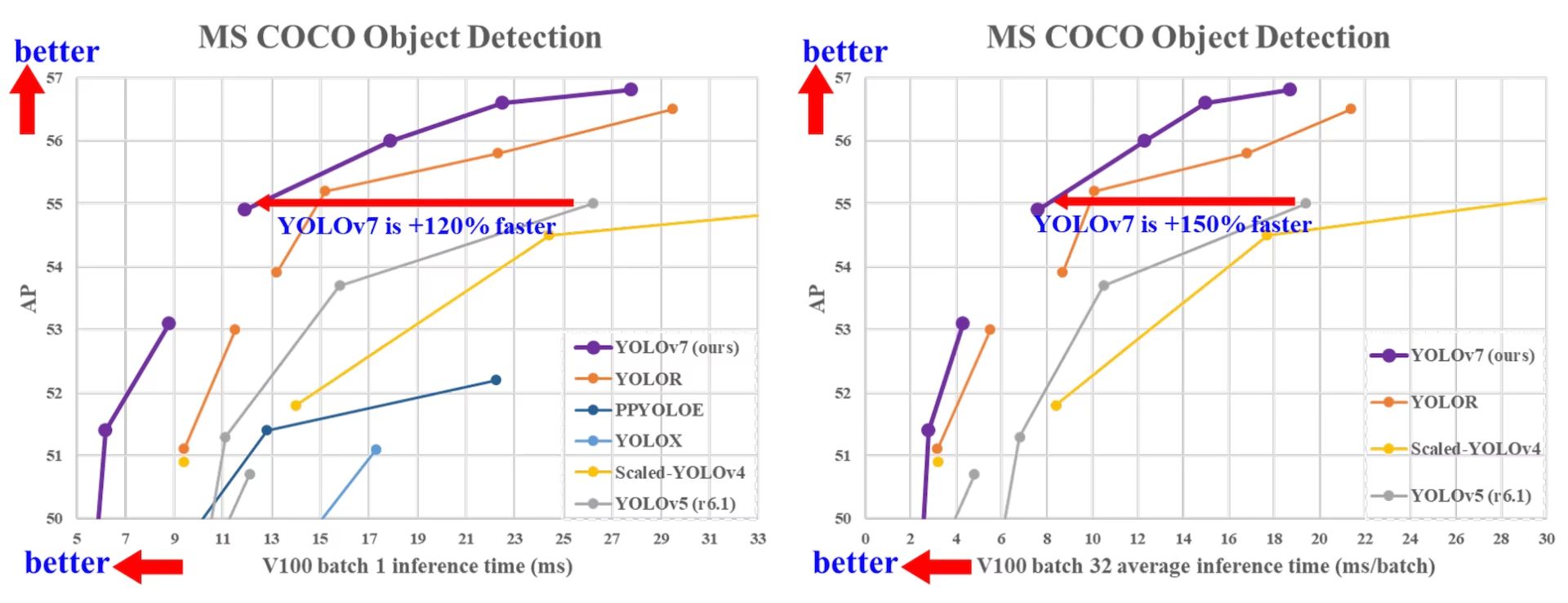
YOLOv7, lançado em julho de 2022, foi um avanço significativo em detecção de objetos em tempo real na época do seu lançamento. Ele alcançou 56,8% de AP em uma GPU V100, estabelecendo novos benchmarks quando foi introduzido. O YOLOv7 superou detectores de objetos contemporâneos como YOLOR, YOLOX, Scaled-YOLOv4 e YOLOv5 em velocidade e precisão. O modelo é treinado no conjunto de dados MS COCO do zero, sem usar quaisquer outros conjuntos de dados ou pesos pré-treinados. O código-fonte do YOLOv7 está disponível no GitHub. Observe que modelos mais novos como YOLO11 e YOLO26 alcançaram, desde então, maior precisão com eficiência aprimorada.
Link to this sectionComparação de detectores de objetos SOTA#
A partir dos resultados na tabela de comparação do YOLO, sabemos que o método proposto possui o melhor equilíbrio entre velocidade e precisão de forma abrangente. Se compararmos o YOLOv7-tiny-SiLU com o YOLOv5-N (r6.1), nosso método é 127 fps mais rápido e 10,7% mais preciso em AP. Além disso, o YOLOv7 tem 51,4% de AP a uma taxa de quadros de 161 fps, enquanto o PPYOLOE-L com o mesmo AP tem apenas 78 fps de taxa de quadros. Em termos de uso de parâmetros, o YOLOv7 tem 41% a menos que o PPYOLOE-L.
Se compararmos o YOLOv7-X com 114 fps de velocidade de inferência com o YOLOv5-L (r6.1) com 99 fps de velocidade de inferência, o YOLOv7-X consegue melhorar o AP em 3,9%. Se o YOLOv7-X for comparado com o YOLOv5-X (r6.1) de escala similar, a velocidade de inferência do YOLOv7-X é 31 fps mais rápida. Além disso, em termos de quantidade de parâmetros e computação, o YOLOv7-X reduz 22% dos parâmetros e 8% da computação em comparação ao YOLOv5-X (r6.1), mas melhora o AP em 2,2% (Fonte).
| Modelo | Params (M) | FLOPs (G) | Tamanho (pixels) | FPS | APtest / val 50-95 | APtest 50 | APtest 75 | APtest S | APtest M | APtest L |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOX-S | 9.0 | 26.8 | 640 | 102 | 40,5% / 40,5% | - | - | - | - | - |
| YOLOX-M | 25.3 | 73.8 | 640 | 81 | 47,2% / 46,9% | - | - | - | - | - |
| YOLOX-L | 54.2 | 155.6 | 640 | 69 | 50,1% / 49,7% | - | - | - | - | - |
| YOLOX-X | 99.1 | 281.9 | 640 | 58 | 51,5% / 51,1% | - | - | - | - | - |
| PPYOLOE-S | 7.9 | 17.4 | 640 | 208 | 43,1% / 42,7% | 60,5% | 46,6% | 23,2% | 46,4% | 56,9% |
| PPYOLOE-M | 23.4 | 49.9 | 640 | 123 | 48,9% / 48,6% | 66,5% | 53,0% | 28,6% | 52.9% | 63,8% |
| PPYOLOE-L | 52.2 | 110,1 | 640 | 78 | 51,4% / 50,9% | 68,9% | 55,6% | 31,4% | 55,3% | 66,1% |
| PPYOLOE-X | 98,4 | 206,6 | 640 | 45 | 52,2% / 51,9% | 69,9% | 56,5% | 33,3% | 56,3% | 66,4% |
| YOLOv5-N (r6.1) | 1.9 | 4.5 | 640 | 159 | - / 28,0% | - | - | - | - | - |
| YOLOv5-S (r6.1) | 7.2 | 16,5 | 640 | 156 | - / 37,4% | - | - | - | - | - |
| YOLOv5-M (r6.1) | 21.2 | 49.0 | 640 | 122 | - / 45,4% | - | - | - | - | - |
| YOLOv5-L (r6.1) | 46.5 | 109,1 | 640 | 99 | - / 49,0% | - | - | - | - | - |
| YOLOv5-X (r6.1) | 86,7 | 205,7 | 640 | 83 | - / 50,7% | - | - | - | - | - |
| YOLOR-CSP | 52.9 | 120,4 | 640 | 106 | 51,1% / 50,8% | 69,6% | 55,7% | 31,7% | 55,3% | 64,7% |
| YOLOR-CSP-X | 96.9 | 226,8 | 640 | 87 | 53,0% / 52,7% | 71,4% | 57,9% | 33,7% | 57.1% | 66.8% |
| YOLOv7-tiny-SiLU | 6.2 | 13.8 | 640 | 286 | 38.7% / 38.7% | 56.7% | 41.7% | 18.8% | 42.4% | 51.9% |
| YOLOv7 | 36.9 | 104.7 | 640 | 161 | 51.4% / 51.2% | 69.7% | 55.9% | 31.8% | 55.5% | 65.0% |
| YOLOv7-X | 71.3 | 189.9 | 640 | 114 | 53.1% / 52.9% | 71.2% | 57.8% | 33.8% | 57.1% | 67.4% |
| YOLOv5-N6 (r6.1) | 3.2 | 18.4 | 1280 | 123 | - / 36.0% | - | - | - | - | - |
| YOLOv5-S6 (r6.1) | 12.6 | 67.2 | 1280 | 122 | - / 44.8% | - | - | - | - | - |
| YOLOv5-M6 (r6.1) | 35.7 | 200.0 | 1280 | 90 | - / 51.3% | - | - | - | - | - |
| YOLOv5-L6 (r6.1) | 76.8 | 445.6 | 1280 | 63 | - / 53.7% | - | - | - | - | - |
| YOLOv5-X6 (r6.1) | 140.7 | 839.2 | 1280 | 38 | - / 55.0% | - | - | - | - | - |
| YOLOR-P6 | 37.2 | 325.6 | 1280 | 76 | 53.9% / 53.5% | 71,4% | 58.9% | 36.1% | 57.7% | 65.6% |
| YOLOR-W6 | 79.8 | 453.2 | 1280 | 66 | 55.2% / 54.8% | 72.7% | 60,5% | 37.7% | 59.1% | 67.1% |
| YOLOR-E6 | 115.8 | 683.2 | 1280 | 45 | 55.8% / 55.7% | 73.4% | 61.1% | 38.4% | 59.7% | 67.7% |
| YOLOR-D6 | 151.7 | 935.6 | 1280 | 34 | 56.5% / 56.1% | 74.1% | 61.9% | 38.9% | 60.4% | 68.7% |
| YOLOv7-W6 | 70.4 | 360.0 | 1280 | 84 | 54.9% / 54.6% | 72.6% | 60.1% | 37.3% | 58.7% | 67.1% |
| YOLOv7-E6 | 97.2 | 515.2 | 1280 | 56 | 56.0% / 55.9% | 73.5% | 61.2% | 38.0% | 59.9% | 68,4% |
| YOLOv7-D6 | 154,7 | 806,8 | 1280 | 44 | 56,6% / 56,3% | 74,0% | 61,8% | 38,8% | 60.1% | 69,5% |
| YOLOv7-E6E | 151.7 | 843,2 | 1280 | 36 | 56,8% / 56,8% | 74,4% | 62,1% | 39,3% | 60,5% | 69,0% |
Link to this sectionVisão geral#
A detecção de objetos em tempo real é um componente importante em muitos sistemas de visão computacional, incluindo rastreamento de objetos, direção autônoma, robótica e análise de imagens médicas. Nos últimos anos, o desenvolvimento da detecção de objetos em tempo real tem se concentrado na concepção de arquiteturas eficientes e na melhoria da velocidade de inferência de várias CPUs, GPUs e unidades de processamento neural (NPUs). O YOLOv7 suporta tanto dispositivos móveis com GPU quanto dispositivos com GPU, desde a borda até a nuvem.
Ao contrário dos detectores de objetos em tempo real tradicionais que se concentram na otimização da arquitetura, o YOLOv7 introduz um foco na otimização do processo de treinamento. Isso inclui módulos e métodos de otimização projetados para melhorar a precisão da detecção de objetos sem aumentar o custo de inferência, um conceito conhecido como "trainable bag-of-freebies".
Link to this sectionPrincipais recursos#
O YOLOv7 introduz várias funcionalidades principais:
-
Reparametrização de Modelo: O YOLOv7 propõe um modelo reparametrizado planejado, que é uma estratégia aplicável a camadas em diferentes redes com o conceito de caminho de propagação de gradiente.
-
Atribuição Dinâmica de Rótulos: O treinamento do modelo com múltiplas camadas de saída apresenta um novo problema: "Como atribuir alvos dinâmicos para as saídas de diferentes ramos?" Para resolver esse problema, o YOLOv7 introduz um novo método de atribuição de rótulos chamado atribuição de rótulos guiada por lead de grosso para fino.
-
Escalonamento Estendido e Composto: O YOLOv7 propõe métodos de "escalonamento estendido" e "composto" para o detector de objetos em tempo real que podem utilizar efetivamente parâmetros e computação.
-
Eficiência: O método proposto pelo YOLOv7 pode reduzir efetivamente cerca de 40% dos parâmetros e 50% da computação de detectores de objetos em tempo real de última geração, e possui uma velocidade de inferência mais rápida e maior precisão de detecção.
Link to this sectionExemplos de uso#
A Ultralytics não publica pesos pré-treinados yolov7.pt ou arquivos YAML ultralytics/cfg/models/v7/, e o treinamento e inferência nativos em PyTorch para YOLOv7 não são suportados pelo pacote Python da Ultralytics. No entanto, você pode trazer um checkpoint do YOLOv7 treinado no repositório upstream YOLOv7 para a Ultralytics exportando-o para ONNX ou TensorRT, conforme mostrado abaixo.
Link to this sectionExportação ONNX#
Para usar o modelo ONNX do YOLOv7 com a Ultralytics:
-
(Opcional) Instale a Ultralytics e exporte um modelo ONNX para ter as dependências necessárias instaladas automaticamente:
pip install ultralytics yolo export model=yolo26n.pt format=onnx -
Exporte o modelo YOLOv7 desejado usando o exportador no repositório YOLOv7:
git clone https://github.com/WongKinYiu/yolov7 cd yolov7 python export.py --weights yolov7-tiny.pt --grid --end2end --simplify --topk-all 100 --iou-thres 0.65 --conf-thres 0.35 --img-size 640 640 --max-wh 640 -
Modifique o grafo do modelo ONNX para ser compatível com a Ultralytics usando o seguinte script:
import numpy as np import onnx from onnx import helper, numpy_helper # Load the ONNX model model_path = "yolov7/yolov7-tiny.onnx" # Replace with your model path model = onnx.load(model_path) graph = model.graph # Fix input shape to batch size 1 input_shape = graph.input[0].type.tensor_type.shape input_shape.dim[0].dim_value = 1 # Define the output of the original model original_output_name = graph.output[0].name # Create slicing nodes sliced_output_name = f"{original_output_name}_sliced" # Define initializers for slicing (remove the first value) start = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_start") end = numpy_helper.from_array(np.array([7], dtype=np.int64), name="slice_end") axes = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_axes") steps = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_steps") graph.initializer.extend([start, end, axes, steps]) slice_node = helper.make_node( "Slice", inputs=[original_output_name, "slice_start", "slice_end", "slice_axes", "slice_steps"], outputs=[sliced_output_name], name="SliceNode", ) graph.node.append(slice_node) # Define segment slicing seg1_start = numpy_helper.from_array(np.array([0], dtype=np.int64), name="seg1_start") seg1_end = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg1_end") seg2_start = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg2_start") seg2_end = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg2_end") seg3_start = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg3_start") seg3_end = numpy_helper.from_array(np.array([6], dtype=np.int64), name="seg3_end") graph.initializer.extend([seg1_start, seg1_end, seg2_start, seg2_end, seg3_start, seg3_end]) # Create intermediate tensors for segments segment_1_name = f"{sliced_output_name}_segment1" segment_2_name = f"{sliced_output_name}_segment2" segment_3_name = f"{sliced_output_name}_segment3" # Add segment slicing nodes graph.node.extend( [ helper.make_node( "Slice", inputs=[sliced_output_name, "seg1_start", "seg1_end", "slice_axes", "slice_steps"], outputs=[segment_1_name], name="SliceSegment1", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg2_start", "seg2_end", "slice_axes", "slice_steps"], outputs=[segment_2_name], name="SliceSegment2", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg3_start", "seg3_end", "slice_axes", "slice_steps"], outputs=[segment_3_name], name="SliceSegment3", ), ] ) # Concatenate the segments concat_output_name = f"{sliced_output_name}_concat" concat_node = helper.make_node( "Concat", inputs=[segment_1_name, segment_3_name, segment_2_name], outputs=[concat_output_name], axis=1, name="ConcatSwapped", ) graph.node.append(concat_node) # Reshape to [1, -1, 6] reshape_shape = numpy_helper.from_array(np.array([1, -1, 6], dtype=np.int64), name="reshape_shape") graph.initializer.append(reshape_shape) final_output_name = f"{concat_output_name}_batched" reshape_node = helper.make_node( "Reshape", inputs=[concat_output_name, "reshape_shape"], outputs=[final_output_name], name="AddBatchDimension", ) graph.node.append(reshape_node) # Get the shape of the reshaped tensor shape_node_name = f"{final_output_name}_shape" shape_node = helper.make_node( "Shape", inputs=[final_output_name], outputs=[shape_node_name], name="GetShapeDim", ) graph.node.append(shape_node) # Extract the second dimension dim_1_index = numpy_helper.from_array(np.array([1], dtype=np.int64), name="dim_1_index") graph.initializer.append(dim_1_index) second_dim_name = f"{final_output_name}_dim1" gather_node = helper.make_node( "Gather", inputs=[shape_node_name, "dim_1_index"], outputs=[second_dim_name], name="GatherSecondDim", ) graph.node.append(gather_node) # Subtract from 100 to determine how many values to pad target_size = numpy_helper.from_array(np.array([100], dtype=np.int64), name="target_size") graph.initializer.append(target_size) pad_size_name = f"{second_dim_name}_padsize" sub_node = helper.make_node( "Sub", inputs=["target_size", second_dim_name], outputs=[pad_size_name], name="CalculatePadSize", ) graph.node.append(sub_node) # Build the [2, 3] pad array: # 1st row -> [0, 0, 0] (no padding at the start of any dim) # 2nd row -> [0, pad_size, 0] (pad only at the end of the second dim) pad_starts = numpy_helper.from_array(np.array([0, 0, 0], dtype=np.int64), name="pad_starts") graph.initializer.append(pad_starts) zero_scalar = numpy_helper.from_array(np.array([0], dtype=np.int64), name="zero_scalar") graph.initializer.append(zero_scalar) pad_ends_name = "pad_ends" concat_pad_ends_node = helper.make_node( "Concat", inputs=["zero_scalar", pad_size_name, "zero_scalar"], outputs=[pad_ends_name], axis=0, name="ConcatPadEnds", ) graph.node.append(concat_pad_ends_node) pad_values_name = "pad_values" concat_pad_node = helper.make_node( "Concat", inputs=["pad_starts", pad_ends_name], outputs=[pad_values_name], axis=0, name="ConcatPadStartsEnds", ) graph.node.append(concat_pad_node) # Create Pad operator to pad with zeros pad_output_name = f"{final_output_name}_padded" pad_constant_value = numpy_helper.from_array( np.array([0.0], dtype=np.float32), name="pad_constant_value", ) graph.initializer.append(pad_constant_value) pad_node = helper.make_node( "Pad", inputs=[final_output_name, pad_values_name, "pad_constant_value"], outputs=[pad_output_name], mode="constant", name="PadToFixedSize", ) graph.node.append(pad_node) # Update the graph's final output to [1, 100, 6] new_output_type = onnx.helper.make_tensor_type_proto( elem_type=graph.output[0].type.tensor_type.elem_type, shape=[1, 100, 6] ) new_output = onnx.helper.make_value_info(name=pad_output_name, type_proto=new_output_type) # Replace the old output with the new one graph.output.pop() graph.output.extend([new_output]) # Save the modified model onnx.save(model, "yolov7-ultralytics.onnx") -
Você pode então carregar o modelo ONNX modificado e executar a inferência com ele na Ultralytics normalmente:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.onnx", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionExportação TensorRT#
-
Siga os passos 1-2 na seção Exportação ONNX.
-
Instale o pacote Python
TensorRT:pip install tensorrt -
Execute o seguinte script para converter o modelo ONNX modificado para o motor TensorRT:
from ultralytics.utils.export import export_engine export_engine("yolov7-ultralytics.onnx", half=True) -
Carregue e execute o modelo na Ultralytics:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.engine", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionCitações e Agradecimentos#
Gostaríamos de agradecer aos autores do YOLOv7 por suas contribuições significativas no campo da detecção de objetos em tempo real:
@inproceedings{wang2023yolov7,
title={YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors},
author={Wang, Chien-Yao and Bochkovskiy, Alexey and Liao, Hong-Yuan Mark},
booktitle={Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition (CVPR)},
pages={7464--7475},
year={2023}
}O artigo oficial do YOLOv7 foi publicado no CVF 2023 Open Access, com um preprint no arXiv. Os autores disponibilizaram seu trabalho publicamente, e a base de código pode ser acessada no GitHub. Agradecemos seus esforços em avançar o campo e tornar seu trabalho acessível à comunidade em geral.
Link to this sectionFAQ#
Link to this sectionO que é o YOLOv7 e por que ele é considerado um avanço na detecção de objetos em tempo real?#
O YOLOv7, lançado em julho de 2022, foi um modelo significativo de detecção de objetos em tempo real que alcançou excelente velocidade e precisão na época de seu lançamento. Ele superou modelos contemporâneos como YOLOX, YOLOv5 e PPYOLOE tanto no uso de parâmetros quanto na velocidade de inferência. As características distintivas do YOLOv7 incluem sua reparametrização de modelo e atribuição dinâmica de rótulos, que otimizam seu desempenho sem aumentar os custos de inferência. Para mais detalhes técnicos sobre sua arquitetura e métricas de comparação com outros detectores de objetos de última geração, consulte o artigo do YOLOv7.
Link to this sectionComo o YOLOv7 melhora em relação aos modelos YOLO anteriores, como o YOLOv4 e o YOLOv5?#
O YOLOv7 introduz várias inovações, incluindo a reparametrização de modelo e a atribuição dinâmica de rótulos, que aprimoram o processo de treinamento e melhoram a precisão da inferência. Comparado ao YOLOv5, o YOLOv7 aumenta significativamente a velocidade e a precisão. Por exemplo, o YOLOv7-X melhora a precisão em 2,2% e reduz os parâmetros em 22% em comparação com o YOLOv5-X. Comparações detalhadas podem ser encontradas na tabela de desempenho Comparação do YOLOv7 com detectores de objetos SOTA.
Link to this sectionPosso usar o YOLOv7 com ferramentas e plataformas da Ultralytics?#
Atualmente, a Ultralytics suporta apenas a inferência ONNX e TensorRT do YOLOv7. Para executar a versão exportada do YOLOv7 em ONNX e TensorRT com a Ultralytics, verifique a seção Exemplos de Uso.
Link to this sectionComo posso treinar um modelo YOLOv7 personalizado usando meu próprio conjunto de dados?#
Para instalar e treinar um modelo YOLOv7 personalizado, siga estes passos:
-
Clone o repositório do YOLOv7:
git clone https://github.com/WongKinYiu/yolov7 -
Navegue até o diretório clonado e instale as dependências:
cd yolov7 pip install -r requirements.txt -
Prepare seu conjunto de dados e configure os parâmetros do modelo de acordo com as instruções de uso fornecidas no repositório. Para mais orientações, visite o repositório GitHub do YOLOv7 para obter as informações e atualizações mais recentes.
-
Após o treinamento, você pode exportar o modelo para ONNX ou TensorRT para uso na Ultralytics, conforme mostrado em Exemplos de Uso.
Link to this sectionQuais são os principais recursos e otimizações introduzidos no YOLOv7?#
O YOLOv7 oferece várias funcionalidades principais que revolucionam a detecção de objetos em tempo real:
- Reparametrização de Modelo: Aprimora o desempenho do modelo otimizando os caminhos de propagação de gradiente.
- Atribuição Dinâmica de Rótulos: Usa um método guiado por lead de grosso para fino para atribuir alvos dinâmicos para saídas em diferentes ramos, melhorando a precisão.
- Escalonamento Estendido e Composto: Utiliza eficientemente parâmetros e computação para escalar o modelo para várias aplicações em tempo real.
- Eficiência: Reduz a contagem de parâmetros em 40% e a computação em 50% em comparação com outros modelos de última geração, alcançando velocidades de inferência mais rápidas.
Para mais detalhes sobre esses recursos, consulte a seção Visão Geral do YOLOv7.