Link to this sectionYOLOv7: Обучаемый "набор бесплатных улучшений" (Trainable Bag-of-Freebies)#
YOLOv7, выпущенная в июле 2022 года, стала значительным прорывом в области детектирования объектов в реальном времени на момент своего появления. Она достигла 56.8% AP на GPU V100, установив новые стандарты. YOLOv7 превзошла современные на тот момент детекторы объектов, такие как YOLOR, YOLOX, Scaled-YOLOv4 и YOLOv5, по скорости и точности. Модель обучалась на наборе данных MS COCO с нуля без использования других датасетов или предобученных весов. Исходный код YOLOv7 доступен на GitHub. Обрати внимание, что более новые модели, такие как YOLO11 и YOLO26, с тех пор достигли более высокой точности при улучшенной эффективности.
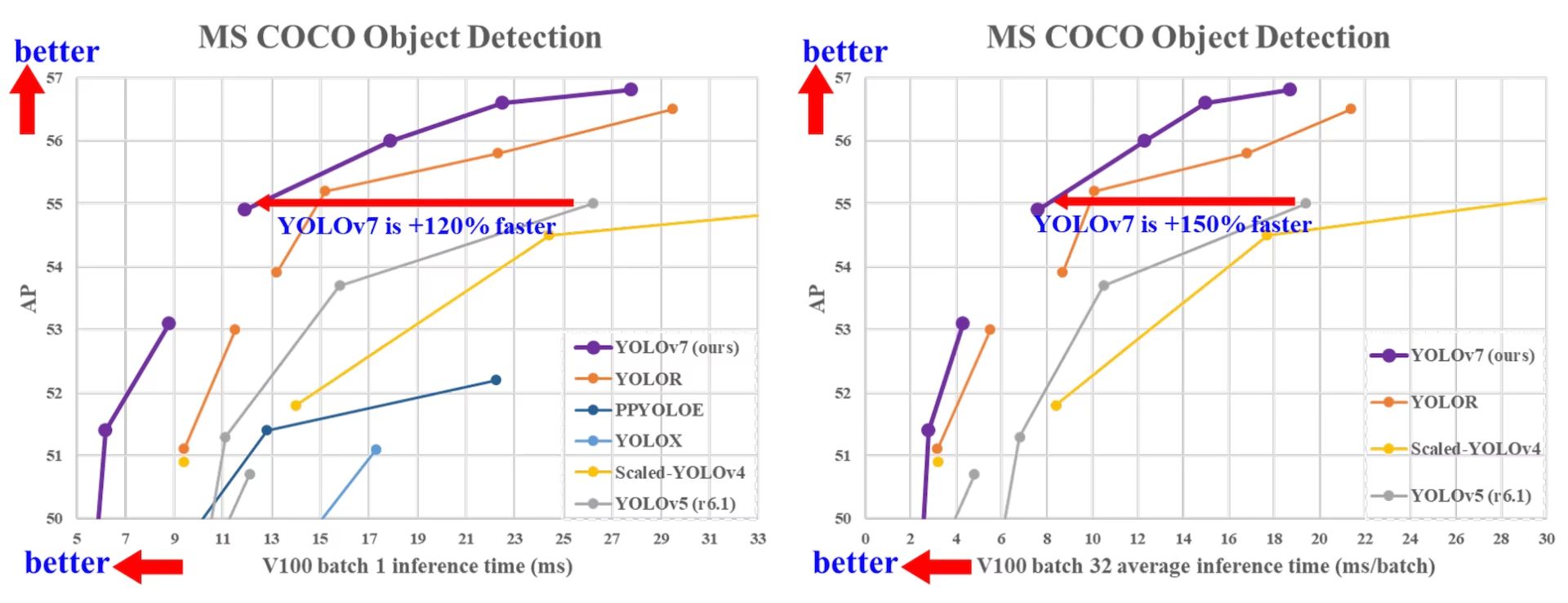
Link to this sectionСравнение современных (SOTA) детекторов объектов#
Исходя из результатов в таблице сравнения YOLO, мы видим, что предложенный метод обладает наилучшим балансом скорости и точности в целом. Если сравнить YOLOv7-tiny-SiLU с YOLOv5-N (r6.1), наш метод на 127 кадров в секунду быстрее и на 10.7% точнее по AP. Кроме того, YOLOv7 показывает 51.4% AP при частоте 161 кадр в секунду, тогда как PPYOLOE-L при том же значении AP выдает лишь 78 кадров в секунду. Что касается количества параметров, YOLOv7 использует на 41% меньше, чем PPYOLOE-L.
Если сравнить YOLOv7-X со скоростью вывода 114 кадров в секунду и YOLOv5-L (r6.1) со скоростью 99 кадров в секунду, YOLOv7-X может улучшить AP на 3.9%. Если сравнивать YOLOv7-X с YOLOv5-X (r6.1) аналогичного масштаба, скорость вывода YOLOv7-X на 31 кадр в секунду выше. Кроме того, по количеству параметров и объему вычислений YOLOv7-X сокращает количество параметров на 22% и объем вычислений на 8% по сравнению с YOLOv5-X (r6.1), при этом улучшая AP на 2.2% (Источник).
| Модель | Params (M) | FLOPs (G) | Размер (пикселей) | FPS | APtest / val 50-95 | APtest 50 | APtest 75 | APtest S | APtest M | APtest L |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOX-S | 9.0 | 26.8 | 640 | 102 | 40.5% / 40.5% | - | - | - | - | - |
| YOLOX-M | 25.3 | 73.8 | 640 | 81 | 47.2% / 46.9% | - | - | - | - | - |
| YOLOX-L | 54.2 | 155.6 | 640 | 69 | 50.1% / 49.7% | - | - | - | - | - |
| YOLOX-X | 99.1 | 281.9 | 640 | 58 | 51.5% / 51.1% | - | - | - | - | - |
| PPYOLOE-S | 7.9 | 17.4 | 640 | 208 | 43.1% / 42.7% | 60.5% | 46.6% | 23.2% | 46.4% | 56.9% |
| PPYOLOE-M | 23.4 | 49.9 | 640 | 123 | 48.9% / 48.6% | 66.5% | 53.0% | 28.6% | 52.9% | 63.8% |
| PPYOLOE-L | 52.2 | 110.1 | 640 | 78 | 51.4% / 50.9% | 68.9% | 55.6% | 31.4% | 55.3% | 66.1% |
| PPYOLOE-X | 98.4 | 206.6 | 640 | 45 | 52.2% / 51.9% | 69.9% | 56.5% | 33.3% | 56.3% | 66.4% |
| YOLOv5-N (r6.1) | 1.9 | 4.5 | 640 | 159 | - / 28.0% | - | - | - | - | - |
| YOLOv5-S (r6.1) | 7.2 | 16.5 | 640 | 156 | - / 37.4% | - | - | - | - | - |
| YOLOv5-M (r6.1) | 21.2 | 49.0 | 640 | 122 | - / 45.4% | - | - | - | - | - |
| YOLOv5-L (r6.1) | 46.5 | 109.1 | 640 | 99 | - / 49.0% | - | - | - | - | - |
| YOLOv5-X (r6.1) | 86.7 | 205.7 | 640 | 83 | - / 50.7% | - | - | - | - | - |
| YOLOR-CSP | 52.9 | 120.4 | 640 | 106 | 51.1% / 50.8% | 69.6% | 55.7% | 31.7% | 55.3% | 64.7% |
| YOLOR-CSP-X | 96.9 | 226.8 | 640 | 87 | 53.0% / 52.7% | 71.4% | 57.9% | 33.7% | 57.1% | 66.8% |
| YOLOv7-tiny-SiLU | 6.2 | 13.8 | 640 | 286 | 38.7% / 38.7% | 56.7% | 41.7% | 18.8% | 42.4% | 51.9% |
| YOLOv7 | 36.9 | 104.7 | 640 | 161 | 51.4% / 51.2% | 69.7% | 55.9% | 31.8% | 55.5% | 65.0% |
| YOLOv7-X | 71.3 | 189.9 | 640 | 114 | 53.1% / 52.9% | 71.2% | 57.8% | 33.8% | 57.1% | 67.4% |
| YOLOv5-N6 (r6.1) | 3.2 | 18.4 | 1280 | 123 | - / 36.0% | - | - | - | - | - |
| YOLOv5-S6 (r6.1) | 12.6 | 67.2 | 1280 | 122 | - / 44.8% | - | - | - | - | - |
| YOLOv5-M6 (r6.1) | 35.7 | 200.0 | 1280 | 90 | - / 51.3% | - | - | - | - | - |
| YOLOv5-L6 (r6.1) | 76.8 | 445.6 | 1280 | 63 | - / 53.7% | - | - | - | - | - |
| YOLOv5-X6 (r6.1) | 140.7 | 839.2 | 1280 | 38 | - / 55.0% | - | - | - | - | - |
| YOLOR-P6 | 37.2 | 325.6 | 1280 | 76 | 53.9% / 53.5% | 71.4% | 58.9% | 36.1% | 57.7% | 65.6% |
| YOLOR-W6 | 79.8 | 453.2 | 1280 | 66 | 55.2% / 54.8% | 72.7% | 60.5% | 37.7% | 59.1% | 67.1% |
| YOLOR-E6 | 115.8 | 683.2 | 1280 | 45 | 55.8% / 55.7% | 73.4% | 61.1% | 38.4% | 59.7% | 67.7% |
| YOLOR-D6 | 151.7 | 935.6 | 1280 | 34 | 56.5% / 56.1% | 74.1% | 61.9% | 38.9% | 60.4% | 68.7% |
| YOLOv7-W6 | 70.4 | 360.0 | 1280 | 84 | 54.9% / 54.6% | 72.6% | 60.1% | 37.3% | 58.7% | 67.1% |
| YOLOv7-E6 | 97.2 | 515.2 | 1280 | 56 | 56.0% / 55.9% | 73.5% | 61.2% | 38.0% | 59.9% | 68.4% |
| YOLOv7-D6 | 154.7 | 806.8 | 1280 | 44 | 56.6% / 56.3% | 74.0% | 61.8% | 38.8% | 60.1% | 69.5% |
| YOLOv7-E6E | 151.7 | 843.2 | 1280 | 36 | 56.8% / 56.8% | 74.4% | 62.1% | 39.3% | 60.5% | 69.0% |
Link to this sectionОбзор#
Детекция объектов в реальном времени — важный компонент многих систем компьютерного зрения, включая отслеживание объектов, автономное вождение, робототехнику и анализ медицинских изображений. В последние годы развитие детектирования объектов в реальном времени сосредоточено на проектировании эффективных архитектур и повышении скорости вывода на различных CPU, GPU и нейронных процессорах (NPU). YOLOv7 поддерживает работу как на мобильных GPU, так и на десктопных GPU, от периферийных устройств до облака.
В отличие от традиционных детекторов объектов реального времени, ориентированных на оптимизацию архитектуры, YOLOv7 делает упор на оптимизацию процесса обучения. Это включает в себя модули и методы оптимизации, предназначенные для повышения точности детектирования без увеличения стоимости вывода — концепция, известная как «обучаемый набор бесплатных улучшений» (trainable bag-of-freebies).
Link to this sectionКлючевые особенности#
YOLOv7 представляет несколько ключевых особенностей:
-
Репараметризация модели: YOLOv7 предлагает концепцию планово репараметризованной модели — стратегию, применимую к слоям в различных сетях с учетом пути распространения градиента.
-
Динамическое назначение меток: Обучение модели с несколькими выходными слоями ставит новую задачу: «Как назначить динамические цели для выходов разных ветвей?». Чтобы решить эту проблему, YOLOv7 представляет новый метод назначения меток под названием «coarse-to-fine lead guided label assignment».
-
Расширенное и составное масштабирование: YOLOv7 предлагает методы «расширения» (extend) и «составного масштабирования» (compound scaling) для детектора объектов реального времени, которые позволяют эффективно использовать параметры и вычислительные ресурсы.
-
Эффективность: Метод, предложенный YOLOv7, позволяет эффективно сократить около 40% параметров и 50% вычислений у современных детекторов объектов реального времени, обеспечивая при этом более высокую скорость вывода и повышенную точность детектирования.
Link to this sectionПримеры использования#
Ultralytics не публикует предобученные веса yolov7.pt или YAML-файлы ultralytics/cfg/models/v7/, а нативное обучение и вывод для YOLOv7 в PyTorch не поддерживаются пакетом Ultralytics Python. Однако ты можешь использовать чекпоинт YOLOv7, обученный в оригинальном репозитории YOLOv7, добавив его в Ultralytics через экспорт в ONNX или TensorRT, как показано ниже.
Link to this sectionЭкспорт в ONNX#
Чтобы использовать модель YOLOv7 ONNX с Ultralytics:
-
(Опционально) Установи Ultralytics и экспортируй модель в ONNX, чтобы необходимые зависимости были установлены автоматически:
pip install ultralytics yolo export model=yolo26n.pt format=onnx -
Экспортируй нужную модель YOLOv7, используя инструмент экспорта в репозитории YOLOv7:
git clone https://github.com/WongKinYiu/yolov7 cd yolov7 python export.py --weights yolov7-tiny.pt --grid --end2end --simplify --topk-all 100 --iou-thres 0.65 --conf-thres 0.35 --img-size 640 640 --max-wh 640 -
Измени граф модели ONNX для совместимости с Ultralytics с помощью следующего скрипта:
import numpy as np import onnx from onnx import helper, numpy_helper # Load the ONNX model model_path = "yolov7/yolov7-tiny.onnx" # Replace with your model path model = onnx.load(model_path) graph = model.graph # Fix input shape to batch size 1 input_shape = graph.input[0].type.tensor_type.shape input_shape.dim[0].dim_value = 1 # Define the output of the original model original_output_name = graph.output[0].name # Create slicing nodes sliced_output_name = f"{original_output_name}_sliced" # Define initializers for slicing (remove the first value) start = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_start") end = numpy_helper.from_array(np.array([7], dtype=np.int64), name="slice_end") axes = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_axes") steps = numpy_helper.from_array(np.array([1], dtype=np.int64), name="slice_steps") graph.initializer.extend([start, end, axes, steps]) slice_node = helper.make_node( "Slice", inputs=[original_output_name, "slice_start", "slice_end", "slice_axes", "slice_steps"], outputs=[sliced_output_name], name="SliceNode", ) graph.node.append(slice_node) # Define segment slicing seg1_start = numpy_helper.from_array(np.array([0], dtype=np.int64), name="seg1_start") seg1_end = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg1_end") seg2_start = numpy_helper.from_array(np.array([4], dtype=np.int64), name="seg2_start") seg2_end = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg2_end") seg3_start = numpy_helper.from_array(np.array([5], dtype=np.int64), name="seg3_start") seg3_end = numpy_helper.from_array(np.array([6], dtype=np.int64), name="seg3_end") graph.initializer.extend([seg1_start, seg1_end, seg2_start, seg2_end, seg3_start, seg3_end]) # Create intermediate tensors for segments segment_1_name = f"{sliced_output_name}_segment1" segment_2_name = f"{sliced_output_name}_segment2" segment_3_name = f"{sliced_output_name}_segment3" # Add segment slicing nodes graph.node.extend( [ helper.make_node( "Slice", inputs=[sliced_output_name, "seg1_start", "seg1_end", "slice_axes", "slice_steps"], outputs=[segment_1_name], name="SliceSegment1", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg2_start", "seg2_end", "slice_axes", "slice_steps"], outputs=[segment_2_name], name="SliceSegment2", ), helper.make_node( "Slice", inputs=[sliced_output_name, "seg3_start", "seg3_end", "slice_axes", "slice_steps"], outputs=[segment_3_name], name="SliceSegment3", ), ] ) # Concatenate the segments concat_output_name = f"{sliced_output_name}_concat" concat_node = helper.make_node( "Concat", inputs=[segment_1_name, segment_3_name, segment_2_name], outputs=[concat_output_name], axis=1, name="ConcatSwapped", ) graph.node.append(concat_node) # Reshape to [1, -1, 6] reshape_shape = numpy_helper.from_array(np.array([1, -1, 6], dtype=np.int64), name="reshape_shape") graph.initializer.append(reshape_shape) final_output_name = f"{concat_output_name}_batched" reshape_node = helper.make_node( "Reshape", inputs=[concat_output_name, "reshape_shape"], outputs=[final_output_name], name="AddBatchDimension", ) graph.node.append(reshape_node) # Get the shape of the reshaped tensor shape_node_name = f"{final_output_name}_shape" shape_node = helper.make_node( "Shape", inputs=[final_output_name], outputs=[shape_node_name], name="GetShapeDim", ) graph.node.append(shape_node) # Extract the second dimension dim_1_index = numpy_helper.from_array(np.array([1], dtype=np.int64), name="dim_1_index") graph.initializer.append(dim_1_index) second_dim_name = f"{final_output_name}_dim1" gather_node = helper.make_node( "Gather", inputs=[shape_node_name, "dim_1_index"], outputs=[second_dim_name], name="GatherSecondDim", ) graph.node.append(gather_node) # Subtract from 100 to determine how many values to pad target_size = numpy_helper.from_array(np.array([100], dtype=np.int64), name="target_size") graph.initializer.append(target_size) pad_size_name = f"{second_dim_name}_padsize" sub_node = helper.make_node( "Sub", inputs=["target_size", second_dim_name], outputs=[pad_size_name], name="CalculatePadSize", ) graph.node.append(sub_node) # Build the [2, 3] pad array: # 1st row -> [0, 0, 0] (no padding at the start of any dim) # 2nd row -> [0, pad_size, 0] (pad only at the end of the second dim) pad_starts = numpy_helper.from_array(np.array([0, 0, 0], dtype=np.int64), name="pad_starts") graph.initializer.append(pad_starts) zero_scalar = numpy_helper.from_array(np.array([0], dtype=np.int64), name="zero_scalar") graph.initializer.append(zero_scalar) pad_ends_name = "pad_ends" concat_pad_ends_node = helper.make_node( "Concat", inputs=["zero_scalar", pad_size_name, "zero_scalar"], outputs=[pad_ends_name], axis=0, name="ConcatPadEnds", ) graph.node.append(concat_pad_ends_node) pad_values_name = "pad_values" concat_pad_node = helper.make_node( "Concat", inputs=["pad_starts", pad_ends_name], outputs=[pad_values_name], axis=0, name="ConcatPadStartsEnds", ) graph.node.append(concat_pad_node) # Create Pad operator to pad with zeros pad_output_name = f"{final_output_name}_padded" pad_constant_value = numpy_helper.from_array( np.array([0.0], dtype=np.float32), name="pad_constant_value", ) graph.initializer.append(pad_constant_value) pad_node = helper.make_node( "Pad", inputs=[final_output_name, pad_values_name, "pad_constant_value"], outputs=[pad_output_name], mode="constant", name="PadToFixedSize", ) graph.node.append(pad_node) # Update the graph's final output to [1, 100, 6] new_output_type = onnx.helper.make_tensor_type_proto( elem_type=graph.output[0].type.tensor_type.elem_type, shape=[1, 100, 6] ) new_output = onnx.helper.make_value_info(name=pad_output_name, type_proto=new_output_type) # Replace the old output with the new one graph.output.pop() graph.output.extend([new_output]) # Save the modified model onnx.save(model, "yolov7-ultralytics.onnx") -
После этого ты можешь загрузить модифицированную модель ONNX и выполнять вывод в Ultralytics в обычном режиме:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.onnx", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionЭкспорт в TensorRT#
-
Выполни шаги 1-2 из раздела Экспорт в ONNX.
-
Установи Python-пакет
TensorRT:pip install tensorrt -
Запусти следующий скрипт для конвертации модифицированной модели ONNX в движок TensorRT:
from ultralytics.utils.export import export_engine export_engine("yolov7-ultralytics.onnx", half=True) -
Загрузи и запусти модель в Ultralytics:
from ultralytics import ASSETS, YOLO model = YOLO("yolov7-ultralytics.engine", task="detect") results = model(ASSETS / "bus.jpg")
Link to this sectionЦитирование и благодарности#
Мы хотели бы выразить признательность авторам YOLOv7 за их значительный вклад в область детектирования объектов в реальном времени:
@inproceedings{wang2023yolov7,
title={YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors},
author={Wang, Chien-Yao and Bochkovskiy, Alexey and Liao, Hong-Yuan Mark},
booktitle={Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition (CVPR)},
pages={7464--7475},
year={2023}
}Официальная статья YOLOv7 была опубликована в CVF 2023 Open Access, с препринтом на arXiv. Авторы сделали свою работу общедоступной, а кодовую базу можно найти на GitHub. Мы ценим их усилия по развитию этой области и предоставлению доступа к результатам их работы широкому сообществу.
Link to this sectionFAQ#
Link to this sectionЧто такое YOLOv7 и почему она считается прорывом в детектировании объектов в реальном времени?#
YOLOv7, выпущенная в июле 2022 года, стала значимой моделью детектирования объектов в реальном времени, обеспечившей превосходную скорость и точность на момент релиза. Она превзошла современные ей модели, такие как YOLOX, YOLOv5 и PPYOLOE, как по количеству используемых параметров, так и по скорости вывода. Отличительными особенностями YOLOv7 являются репараметризация модели и динамическое назначение меток, которые оптимизируют производительность без увеличения затрат на вывод. Более подробную техническую информацию об архитектуре и метриках сравнения с другими современными детекторами объектов см. в статье о YOLOv7.
Link to this sectionЧем YOLOv7 лучше предыдущих моделей YOLO, таких как YOLOv4 и YOLOv5?#
YOLOv7 предлагает несколько инноваций, включая репараметризацию модели и динамическое назначение меток, которые улучшают процесс обучения и повышают точность вывода. По сравнению с YOLOv5, YOLOv7 значительно повышает скорость и точность. Например, YOLOv7-X увеличивает точность на 2.2% и сокращает количество параметров на 22% по сравнению с YOLOv5-X. Подробные сравнения можно найти в таблице производительности Сравнение YOLOv7 с современными детекторами объектов.
Link to this sectionМогу ли я использовать YOLOv7 с инструментами и платформами Ultralytics?#
На данный момент Ultralytics поддерживает только вывод YOLOv7 через ONNX и TensorRT. Чтобы запустить экспортированную в ONNX или TensorRT версию YOLOv7 с помощью Ultralytics, ознакомься с разделом Примеры использования.
Link to this sectionКак обучить собственную модель YOLOv7 на своем датасете?#
Чтобы установить и обучить собственную модель YOLOv7, выполни следующие шаги:
-
Клонируй репозиторий YOLOv7:
git clone https://github.com/WongKinYiu/yolov7 -
Перейди в клонированную директорию и установи зависимости:
cd yolov7 pip install -r requirements.txt -
Подготовь свой датасет и настрой параметры модели в соответствии с инструкциями по использованию, приведенными в репозитории. Для получения дополнительных указаний посети репозиторий YOLOv7 на GitHub, где представлена самая свежая информация и обновления.
-
После обучения ты можешь экспортировать модель в ONNX или TensorRT для использования в Ultralytics, как показано в разделе Примеры использования.
Link to this sectionКаковы ключевые особенности и оптимизации, внедренные в YOLOv7?#
YOLOv7 предлагает несколько ключевых особенностей, которые произвели революцию в детектировании объектов в реальном времени:
- Репараметризация модели: Повышает производительность модели за счет оптимизации путей распространения градиента.
- Динамическое назначение меток: Использует метод «coarse-to-fine lead guided» для назначения динамических целей для выходов по различным ветвям, что повышает точность.
- Расширенное и составное масштабирование: Эффективно использует параметры и вычислительные ресурсы для масштабирования модели под различные задачи реального времени.
- Эффективность: Сокращает количество параметров на 40% и вычисления на 50% по сравнению с другими современными моделями, обеспечивая при этом более высокую скорость вывода.
Более подробную информацию об этих функциях см. в разделе Обзор YOLOv7.