Link to this sectionMeituan YOLOv6#
Link to this sectionGenel Bakış#
Meituan YOLOv6, released in 2022, offers a strong balance between speed and accuracy, making it a popular choice for real-time applications. This model introduces several notable enhancements on its architecture and training scheme, including the implementation of a Bi-directional Concatenation (BiC) module, an anchor-aided training (AAT) strategy, and an improved backbone and neck design for high accuracy on the COCO dataset.
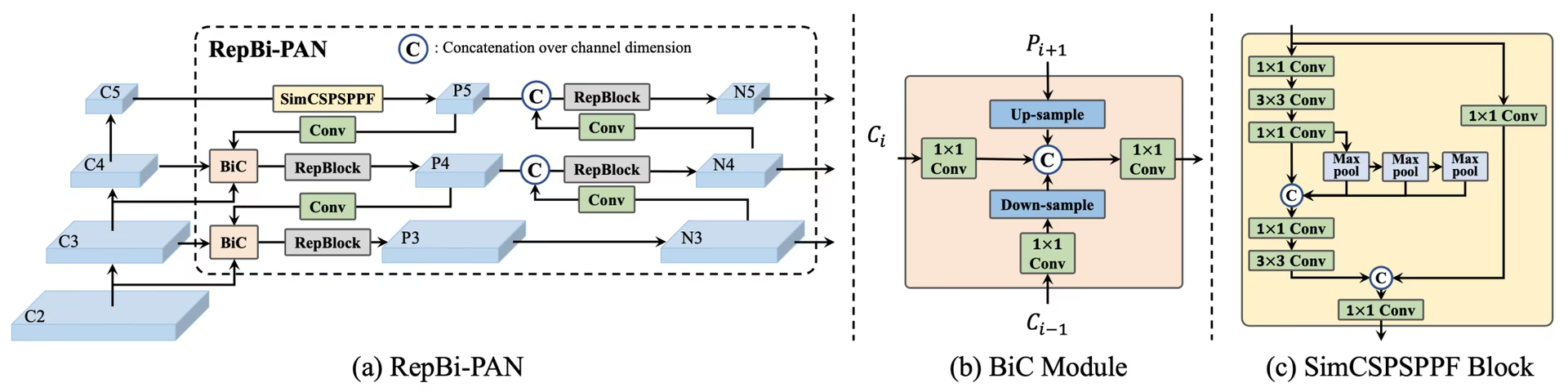 YOLOv6'ya genel bakış. Önemli performans iyileştirmelerine yol açan yeniden tasarlanmış ağ bileşenlerini ve eğitim stratejilerini gösteren model mimarisi şeması. (a) YOLOv6'nın boyun kısmı (N ve S gösterilmiştir). M/L için RepBlocks'un CSPStackRep ile değiştirildiğine dikkat et. (b) Bir BiC modülünün yapısı. (c) Bir SimCSPSPPF bloğu. (kaynak).
YOLOv6'ya genel bakış. Önemli performans iyileştirmelerine yol açan yeniden tasarlanmış ağ bileşenlerini ve eğitim stratejilerini gösteren model mimarisi şeması. (a) YOLOv6'nın boyun kısmı (N ve S gösterilmiştir). M/L için RepBlocks'un CSPStackRep ile değiştirildiğine dikkat et. (b) Bir BiC modülünün yapısı. (c) Bir SimCSPSPPF bloğu. (kaynak).
Link to this sectionTemel Özellikler#
- Çift Yönlü Birleştirme (BiC) Modülü: YOLOv6, dedektörün boyun kısmına bir BiC modülü ekleyerek yerelleştirme sinyallerini geliştirir ve hızda göz ardı edilebilir bir düşüşle performans kazanımları sağlar.
- Çapa Destekli Eğitim (AAT) Stratejisi: Bu model, çıkarım verimliliğinden ödün vermeden hem çapa tabanlı hem de çapa içermeyen paradigmaların avantajlarından yararlanmak için AAT'yi önerir.
- Geliştirilmiş Omurga ve Boyun Tasarımı: YOLOv6'yı omurga ve boyun kısmına bir aşama daha ekleyerek derinleştiren bu model, piyasaya sürüldüğünde yüksek çözünürlüklü girişte COCO veri kümesinde güçlü bir performans elde etti.
- Kendi Kendine Damıtma Stratejisi: YOLOv6'nın daha küçük modellerinin performansını artırmak, eğitim sırasında yardımcı regresyon dalını iyileştirmek ve belirgin bir hız düşüşünden kaçınmak için çıkarım sırasında onu kaldırmak amacıyla yeni bir kendi kendine damıtma stratejisi uygulanmıştır.
Link to this sectionPerformans Metrikleri#
YOLOv6, farklı ölçeklerde çeşitli önceden eğitilmiş modeller sağlar:
- YOLOv6-N: NVIDIA T4 GPU ile 1187 FPS'de COCO val2017 üzerinde %37.5 AP.
- YOLOv6-S: 484 FPS'de %45.0 AP.
- YOLOv6-M: 226 FPS'de %50.0 AP.
- YOLOv6-L: 116 FPS'de %52.8 AP.
- YOLOv6-L6: Gerçek zamanlıda en güncel doğruluk.
YOLOv6 ayrıca farklı hassasiyetler için nicelleştirilmiş modeller ve mobil platformlar için optimize edilmiş modeller de sağlar.
Link to this sectionKullanım Örnekleri#
Bu örnek, basit YOLOv6 eğitim ve çıkarım örnekleri sunar. Bunlar ve diğer modlar hakkındaki tam belgeler için Tahmin, Eğitim, Doğrulama ve Dışa Aktarma doküman sayfalarına göz at.
Python'da ilgili modeli oluşturmak için YOLOv6 *.yaml dosyaları YOLO() sınıfına aktarılabilir:
from ultralytics import YOLO
# Build a YOLOv6n model from scratch
model = YOLO("yolov6n.yaml")
# Display model information (optional)
model.info()
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLOv6n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")Link to this sectionDesteklenen Görevler ve Modlar#
YOLOv6 serisi, her biri yüksek performanslı Nesne Algılama için optimize edilmiş bir dizi model sunar. Bu modeller, değişen hesaplama ihtiyaçlarını ve doğruluk gereksinimlerini karşılayarak çok çeşitli uygulamalar için onları çok yönlü kılar.
| Model | Dosya Adları | Görevler | Çıkarım | Doğrulama | Eğitim | Dışa Aktar (Export) |
|---|---|---|---|---|---|---|
| YOLOv6-N | yolov6n.yaml | Nesne Tespiti | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-S | yolov6s.yaml | Nesne Tespiti | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-M | yolov6m.yaml | Nesne Tespiti | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-L | yolov6l.yaml | Nesne Tespiti | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-X | yolov6x.yaml | Nesne Tespiti | ✅ | ✅ | ✅ | ✅ |
Bu tablo, YOLOv6 model varyantlarına ayrıntılı bir genel bakış sunarak nesne algılama görevlerindeki yeteneklerini ve Çıkarım, Doğrulama, Eğitim ve Dışa Aktarma gibi çeşitli operasyonel modlarla uyumluluklarını vurgular. Bu kapsamlı destek, kullanıcıların YOLOv6 modellerinin yeteneklerinden çok çeşitli nesne algılama senaryolarında tam olarak yararlanabilmelerini sağlar.
Link to this sectionAlıntılar ve Teşekkür#
Gerçek zamanlı nesne algılama alanındaki önemli katkılarından dolayı yazarlara teşekkür ederiz:
@misc{li2023yolov6,
title={YOLOv6 v3.0: A Full-Scale Reloading},
author={Chuyi Li and Lulu Li and Yifei Geng and Hongliang Jiang and Meng Cheng and Bo Zhang and Zaidan Ke and Xiaoming Xu and Xiangxiang Chu},
year={2023},
eprint={2301.05586},
archivePrefix={arXiv},
primaryClass={cs.CV}
}Orijinal YOLOv6 makalesi arXiv üzerinde bulunabilir. Yazarlar çalışmalarını herkese açık hale getirmişlerdir ve kod tabanına GitHub üzerinden erişilebilir. Alanı ilerletme ve çalışmalarını daha geniş bir topluluk için erişilebilir kılma çabalarını takdir ediyoruz.
Link to this sectionSSS#
Link to this sectionMeituan YOLOv6 nedir ve onu benzersiz kılan nedir?#
2022'de piyasaya sürülen Meituan YOLOv6, gerçek zamanlı uygulamalar için tasarlanmış, hız ve doğruluk arasında denge kuran bir nesne dedektörüdür. Çift Yönlü Birleştirme (BiC) modülü ve Çapa Destekli Eğitim (AAT) stratejisi gibi dikkate değer mimari geliştirmelere sahiptir. Bu yenilikler, minimum hız düşüşüyle önemli performans kazanımları sağlar ve YOLOv6'yı nesne algılama görevleri için rekabetçi bir seçenek haline getirir.
Link to this sectionYOLOv6'daki Çift Yönlü Birleştirme (BiC) Modülü performansı nasıl artırır?#
YOLOv6'daki Çift Yönlü Birleştirme (BiC) modülü, dedektörün boyun kısmındaki yerelleştirme sinyallerini geliştirerek hız üzerinde ihmal edilebilir bir etkiyle performans iyileştirmeleri sağlar. Bu modül, farklı özellik haritalarını etkili bir şekilde birleştirerek modelin nesneleri doğru bir şekilde algılama yeteneğini artırır. YOLOv6'nın özellikleri hakkında daha fazla bilgi için Temel Özellikler bölümüne bak.
Link to this sectionUltralytics kullanarak nasıl YOLOv6 modeli eğitebilirim?#
Basit Python veya CLI komutlarıyla Ultralytics kullanarak bir YOLOv6 modeli eğitebilirsin. Örneğin:
from ultralytics import YOLO
# Build a YOLOv6n model from scratch
model = YOLO("yolov6n.yaml")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)Daha fazla bilgi için Eğitim sayfasını ziyaret et.
Link to this sectionYOLOv6'nın farklı sürümleri nelerdir ve performans metrikleri nelerdir?#
YOLOv6, her biri farklı performans gereksinimleri için optimize edilmiş birden fazla sürüm sunar:
- YOLOv6-N: 1187 FPS'de %37.5 AP
- YOLOv6-S: 484 FPS'de %45.0 AP
- YOLOv6-M: 226 FPS'de %50.0 AP
- YOLOv6-L: 116 FPS'de %52.8 AP
- YOLOv6-L6: Gerçek zamanlı senaryolarda en güncel doğruluk
Bu modeller, NVIDIA T4 GPU kullanılarak COCO veri kümesi üzerinde değerlendirilmiştir. Performans metrikleri hakkında daha fazla bilgi için Performans Metrikleri bölümüne bak.
Link to this sectionÇapa Destekli Eğitim (AAT) stratejisi YOLOv6'ya nasıl fayda sağlar?#
YOLOv6'daki Çapa Destekli Eğitim (AAT), çapa tabanlı ve çapa içermeyen yaklaşımların unsurlarını birleştirerek çıkarım verimliliğinden ödün vermeden modelin algılama yeteneklerini geliştirir. Bu strateji, sınırlayıcı kutu tahminlerini iyileştirmek için eğitim sırasında çapalardan yararlanarak YOLOv6'yı çeşitli nesne algılama görevlerinde etkili kılar.
Link to this sectionUltralytics'te YOLOv6 modelleri tarafından hangi operasyonel modlar desteklenir?#
YOLOv6; Çıkarım, Doğrulama, Eğitim ve Dışa Aktarma dahil olmak üzere çeşitli operasyonel modları destekler. Bu esneklik, kullanıcıların farklı senaryolarda modelin yeteneklerinden tam olarak yararlanmasını sağlar. Her bir modun ayrıntılı bir özeti için Desteklenen Görevler ve Modlar bölümüne göz at.