Link to this sectionKITTI 数据集#
![]()
Ultralytics KITTI 数据集是一个用于自动驾驶的 2D 目标检测数据集,包含 7,481 张带有标注的图像(5,985 张用于训练,1,496 张用于验证),涵盖 8 个类别:car(汽车)、van(厢式货车)、truck(卡车)、pedestrian(行人)、person_sitting(坐着的人)、cyclist(骑行者)、tram(有轨电车)和 misc(杂项)。该数据集由卡尔斯鲁厄理工学院(Karlsruhe Institute of Technology)和芝加哥丰田技术学院(Toyota Technological Institute at Chicago)发布,其图像来自真实的城市、乡村和高速公路驾驶场景。
Watch: How to Train Ultralytics YOLO on the KITTI Dataset | Object Detection, Inference & ONNX Export 🚀
更广泛的 KITTI Vision Benchmark Suite 还涵盖了深度估计、光流、立体视觉和视觉里程计,但此处使用的 Ultralytics kitti.yaml 配置是专门针对 2D 目标检测设置的,并与 Ultralytics YOLO26 完全兼容。
Link to this section数据集结构#
原始的 KITTI 测试集未包含在此处,因为它没有公开的标注数据(ground-truth annotations)。
该数据集包含 7,481 张带标注的图像,涵盖汽车、行人、骑行者等物体,按照 kitti.yaml 配置定义划分为两个预设子集:
| 拆分 | 图像 | 描述 |
|---|---|---|
| 训练 | 5,985 | 用于模型训练的标注图像 |
| 验证 | 1,496 | 用于评估和基准测试的预留图像 |
Link to this section物体类别#
kitti.yaml 文件定义了 8 个目标类别,涵盖了驾驶场景中常见的车辆、人员和其他道路使用者:
- car
- van
- truck
- pedestrian
- person_sitting
- cyclist
- tram
- misc
Link to this section应用#
KITTI 数据集支持自动驾驶和机器人领域中一系列 2D 检测应用:
- 自动驾驶感知:训练模型以检测并跟踪汽车、行人和骑行者,从而使自动驾驶系统能够安全行驶。
- ADAS 开发:利用真实驾驶影像构建驾驶辅助功能,例如碰撞预警和行人检测。
- 交通与道路场景分析:检测并统计车辆和道路使用者,以研究交通流量和道路安全。
- 计算机视觉基准测试:将 KITTI 作为评估 2D 目标检测和跟踪模型的标准基准。
若要在浏览器中为你的驾驶图像打标、训练和管理数据集版本,请使用 Ultralytics Platform 运行完整工作流。
Link to this section数据集 YAML#
Ultralytics 使用 YAML 文件定义 KITTI 数据集配置。该文件指定了训练所需的数据集路径、类标签和元数据。配置文件地址为 https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml。
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# KITTI dataset by Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago
# Documentation: https://docs.ultralytics.com/datasets/detect/kitti
# Example usage: yolo train data=kitti.yaml
# parent
# ├── ultralytics
# └── datasets
# └── kitti ← downloads here (390.5 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: kitti # dataset root dir
train: images/train # train images (relative to 'path') 5985 images
val: images/val # val images (relative to 'path') 1496 images
names:
0: car
1: van
2: truck
3: pedestrian
4: person_sitting
5: cyclist
6: tram
7: misc
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/kitti.zipLink to this section用法#
若要使用图像大小 640 训练 YOLO26n 模型并在 KITTI 数据集上运行 100 个 epoch,请使用以下命令。数据集 (390.5 MB) 会在首次使用时自动下载。有关更多详情,请参阅训练页面。
from ultralytics import YOLO
# Load a pretrained YOLO26 model
model = YOLO("yolo26n.pt")
# Train on kitti dataset
results = model.train(data="kitti.yaml", epochs=100, imgsz=640)你也可以使用相同的配置文件,直接通过命令行或 Python API 执行评估、推理 和 导出 任务。
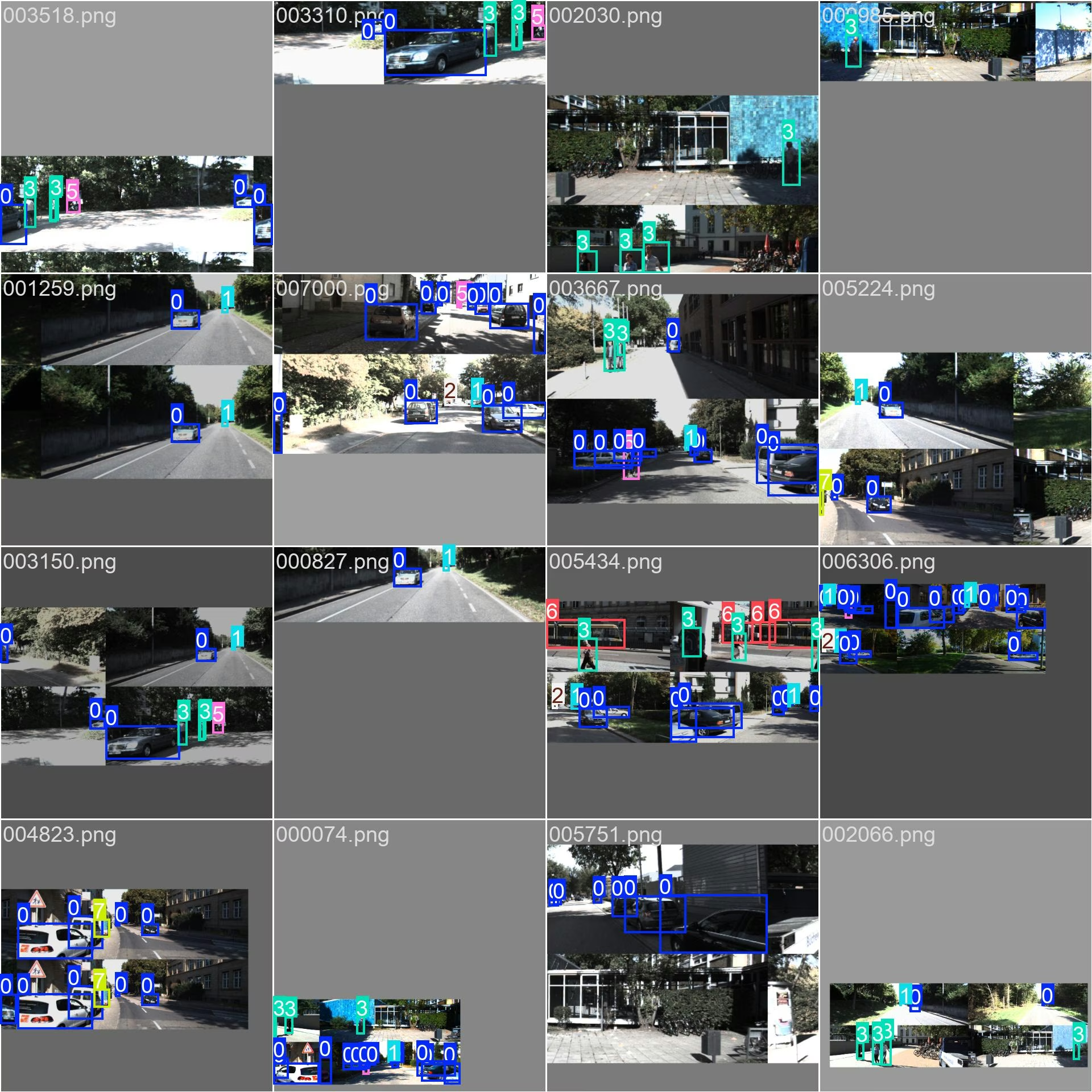
Link to this section样本图像和标注#
下方的示例展示了数据集中带有 2D 边界框标注的驾驶场景。KITTI 图像涵盖了在真实交通中捕获的城市、乡村和高速公路场景,为模型提供了多样的目标尺度、视角和光照条件。
Link to this section引用与致谢#
如果你在研究中使用了 KITTI 数据集,请引用以下论文:
@article{Geiger2013IJRR,
author = {Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun},
title = {Vision meets Robotics: The KITTI Dataset},
journal = {International Journal of Robotics Research (IJRR)},
year = {2013}
}我们感谢 KITTI Vision Benchmark Suite 提供这一全面的数据集,它持续推动着计算机视觉、机器人和自动系统领域的进步。访问 KITTI 网站了解更多信息。
Link to this section常见问题解答#
Link to this sectionKITTI 数据集有什么用途?#
Ultralytics KITTI 数据集用于训练和评估自动驾驶领域的 2D 目标检测模型。它提供了涵盖 8 个类别(包括汽车、行人和骑行者)的 7,481 张带标注图像,并被广泛用于感知模型基准测试。
Link to this sectionKITTI 数据集中有多少图像和类别?#
Ultralytics KITTI 配置包含 7,481 张图像(5,985 张用于训练,1,496 张用于验证),没有单独的测试集。每张图像均针对 8 个类别进行了标注:car、van、truck、pedestrian、person_sitting、cyclist、tram 和 misc。
Link to this sectionKITTI 数据集包含测试集吗?#
不包含。Ultralytics KITTI 配置仅提供训练(5,985 张图像)和验证(1,496 张图像)子集。原始的 KITTI 测试集因缺少公开标注数据而被排除。
Link to this section我该如何下载 KITTI 数据集?#
当你首次使用 data="kitti.yaml" 进行训练时,数据集 (390.5 MB) 会自动下载,无需手动操作。Ultralytics 会获取图像和标签,并将其解压到你的本地数据集目录。你可以在 检测数据集概览 中浏览相关数据集。
Link to this section我可以使用 KITTI 数据集训练 Ultralytics YOLO26 模型吗?#
可以,KITTI 与 Ultralytics YOLO26 完全兼容。你可以直接使用提供的 YAML 配置文件来训练和验证模型。
Link to this section我在哪里可以找到 KITTI 数据集配置文件?#
你可以访问 kitti.yaml 文件,网址为 https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/kitti.yaml。它定义了数据集路径以及训练所用的 8 个类别名称。