Recadrage d'Objets avec Ultralytics YOLO26
Qu'est-ce que le recadrage d'objet ?
Le recadrage d'objets avec Ultralytics YOLO26 implique d'isoler et d'extraire des objets spécifiques detectés d'une image ou d'une vidéo. Les capacités du modèle YOLO26 sont utilisées pour identifier et délimiter précisément les objets, permettant un recadrage précis pour une analyse ou une manipulation ultérieure.
Regarder : Découpage d'objets à l'aide d'Ultralytics YOLO
Avantages du recadrage d'objets
- Analyse Ciblée: YOLO26 facilite le recadrage ciblé d'objets, permettant un examen approfondi ou un traitement d'éléments individuels au sein d'une scène.
- Volume de données réduit : En extrayant uniquement les objets pertinents, le recadrage d'objets contribue à minimiser la taille des données, ce qui le rend efficace pour le stockage, la transmission ou les tâches de calcul ultérieures.
- Précision Améliorée: La précision de la détection d'objets de YOLO26 garantit que les objets recadrés conservent leurs relations spatiales, préservant l'intégrité des informations visuelles pour une analyse détaillée.
Visuels
| Bagages d'aéroport |
|---|
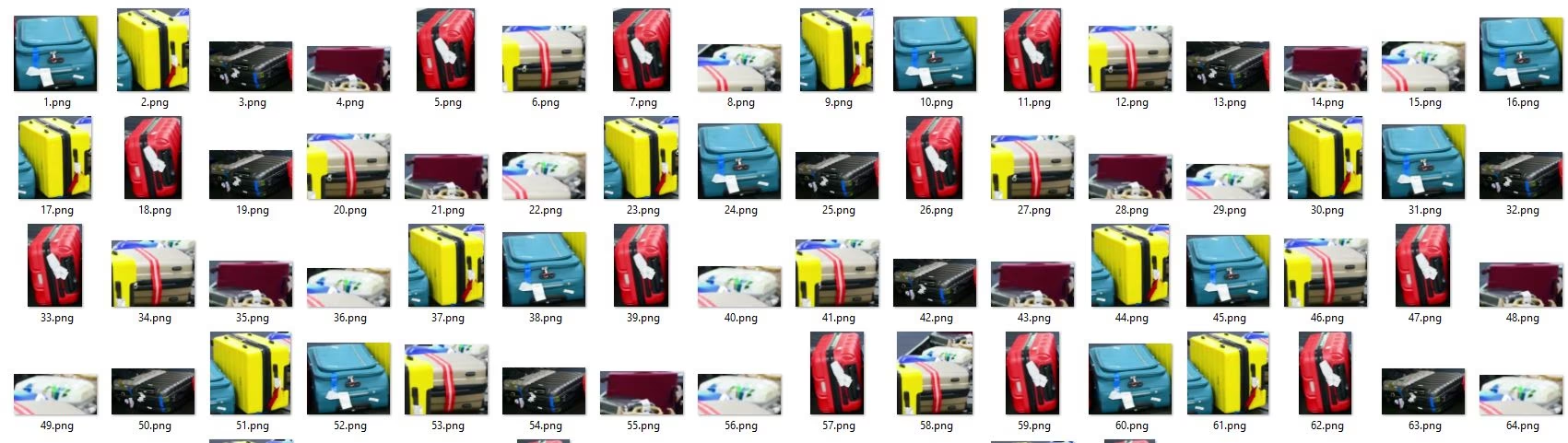 |
| Recadrage de valises sur tapis roulant d'aéroport avec Ultralytics YOLO26 |
Découpage d'objets à l'aide d'Ultralytics YOLO
# Crop the objects
yolo solutions crop show=True
# Pass a source video
yolo solutions crop source="path/to/video.mp4"
# Crop specific classes
yolo solutions crop classes="[0, 2]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Initialize object cropper
cropper = solutions.ObjectCropper(
show=True, # display the output
model="yolo26n.pt", # model for object cropping, e.g., yolo26x.pt.
classes=[0, 2], # crop specific classes such as person and car with the COCO pretrained model.
# conf=0.5, # adjust confidence threshold for the objects.
# crop_dir="cropped-detections", # set the directory name for cropped detections
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = cropper(im0)
# print(results) # access the output
cap.release()
cv2.destroyAllWindows() # destroy all opened windows
Lorsque vous fournissez l'optionnel crop_dir argument, chaque objet recadré est écrit dans ce dossier avec des noms de fichiers qui incluent le nom et la classe de l'image source. Cela facilite l'inspection des détections ou la création d'ensembles de données en aval sans écrire de code supplémentaire.
ObjectCropper Arguments
Voici un tableau avec les ObjectCropper arguments :
| Argument | Type | Par défaut | Description |
|---|---|---|---|
model | str | None | Chemin d'accès à un fichier de modèle Ultralytics YOLO. |
crop_dir | str | 'cropped-detections' | Nom du répertoire pour stocker les détections recadrées. |
De plus, les arguments de visualisation suivants sont disponibles :
| Argument | Type | Par défaut | Description |
|---|---|---|---|
show | bool | False | Si True, affiche les images ou vidéos annotées dans une fenêtre. Utile pour un retour visuel immédiat pendant le développement ou les tests. |
line_width | int or None | None | Spécifie la largeur de ligne des boîtes englobantes. Si None, la largeur de ligne est automatiquement ajustée en fonction de la taille de l'image. Fournit une personnalisation visuelle pour plus de clarté. |
FAQ
Qu'est-ce que le recadrage d'objets dans Ultralytics YOLO26 et comment cela fonctionne-t-il ?
Le recadrage d'objets utilisant Ultralytics YOLO26 implique d'isoler et d'extraire des objets spécifiques d'une image ou d'une vidéo en se basant sur les capacités de detect de YOLO26. Ce processus permet une analyse ciblée, un volume de données réduit et une précision améliorée en exploitant YOLO26 pour identifier les objets avec une grande précision et les recadrer en conséquence. Pour un tutoriel approfondi, consultez l'exemple de recadrage d'objets.
Pourquoi devrais-je utiliser Ultralytics YOLO26 pour le recadrage d'objets par rapport à d'autres solutions ?
Ultralytics YOLO26 se distingue par sa précision, sa rapidité et sa facilité d'utilisation. Il permet une detect et un recadrage d'objets détaillés et précis, essentiels pour l'analyse ciblée et les applications nécessitant une intégrité élevée des données. De plus, YOLO26 s'intègre parfaitement avec des outils comme OpenVINO et TensorRT pour les déploiements nécessitant des capacités en temps réel et une optimisation sur divers matériels. Découvrez les avantages dans le guide d'exportation de modèles.
Comment puis-je réduire le volume de données de mon ensemble de données en utilisant le recadrage d'objets ?
En utilisant Ultralytics YOLO26 pour recadrer uniquement les objets pertinents de vos images ou vidéos, vous pouvez réduire considérablement la taille des données, ce qui les rend plus efficaces pour le stockage et le traitement. Ce processus implique d'entraîner le modèle à detect des objets spécifiques, puis d'utiliser les résultats pour recadrer et enregistrer uniquement ces portions. Pour plus d'informations sur l'exploitation des capacités d'Ultralytics YOLO26, visitez notre guide de démarrage rapide.
Puis-je utiliser Ultralytics YOLO26 pour l'analyse vidéo en temps réel et le recadrage d'objets ?
Oui, Ultralytics YOLO26 peut traiter des flux vidéo en temps réel pour detect et recadrer des objets dynamiquement. Les capacités d'inférence à haute vitesse du modèle le rendent idéal pour les applications en temps réel telles que la surveillance, l'analyse sportive et les systèmes d'inspection automatisés. Consultez les modes de tracking et de prédiction pour comprendre comment implémenter le traitement en temps réel.
Quelles sont les exigences matérielles pour exécuter efficacement YOLO26 pour le recadrage d'objets ?
Ultralytics YOLO26 est optimisé pour les environnements CPU et GPU, mais pour atteindre des performances optimales, en particulier pour l'inférence en temps réel ou à grand volume, un GPU dédié (par exemple, NVIDIA Tesla, série RTX) est recommandé. Pour un déploiement sur des appareils légers, envisagez d'utiliser CoreML pour iOS ou TFLite pour Android. Plus de détails sur les appareils et formats supportés peuvent être trouvés dans nos options de déploiement de modèles.





