Gestion du stationnement avec Ultralytics YOLO26 🚀
Qu'est-ce qu'un système de gestion de stationnement ?
La gestion de stationnement avec Ultralytics YOLO26 assure un stationnement efficace et sûr en organisant les espaces et en surveillant la disponibilité. YOLO26 peut améliorer la gestion des parkings grâce à la détection de véhicules en temps réel et à des informations sur l'occupation des places.
Regarder : Comment mettre en place un système de gestion de stationnement avec Ultralytics | Détection de places en temps réel 🚗
Avantages du système de gestion de stationnement
- Efficacité : La gestion des stationnements optimise l'utilisation des places de stationnement et réduit la congestion.
- Sécurité : La gestion de stationnement utilisant YOLO26 améliore la sécurité des personnes et des véhicules grâce à des mesures de surveillance et de sécurité.
- Réduction des Émissions : La gestion de stationnement utilisant YOLO26 gère le flux de trafic pour minimiser les temps d'attente et les émissions dans les parkings.
Applications concrètes
| Système de gestion de stationnement | Système de gestion de stationnement |
|---|---|
 |  |
| Gestion de stationnement vue aérienne avec Ultralytics YOLO26 | Gestion de stationnement vue de dessus avec Ultralytics YOLO26 |
Flux de travail du code du système de gestion de stationnement
La sélection des points est désormais facile
Le choix des points de stationnement est une tâche essentielle et complexe dans les systèmes de gestion de stationnement. Ultralytics simplifie ce processus en fournissant un outil "Annotateur d'emplacements de stationnement" qui vous permet de définir les zones de stationnement, qui peuvent être utilisées ultérieurement pour un traitement supplémentaire.
Étape 1 : Capturez une image de la vidéo ou du flux de caméra où vous souhaitez gérer le parking.
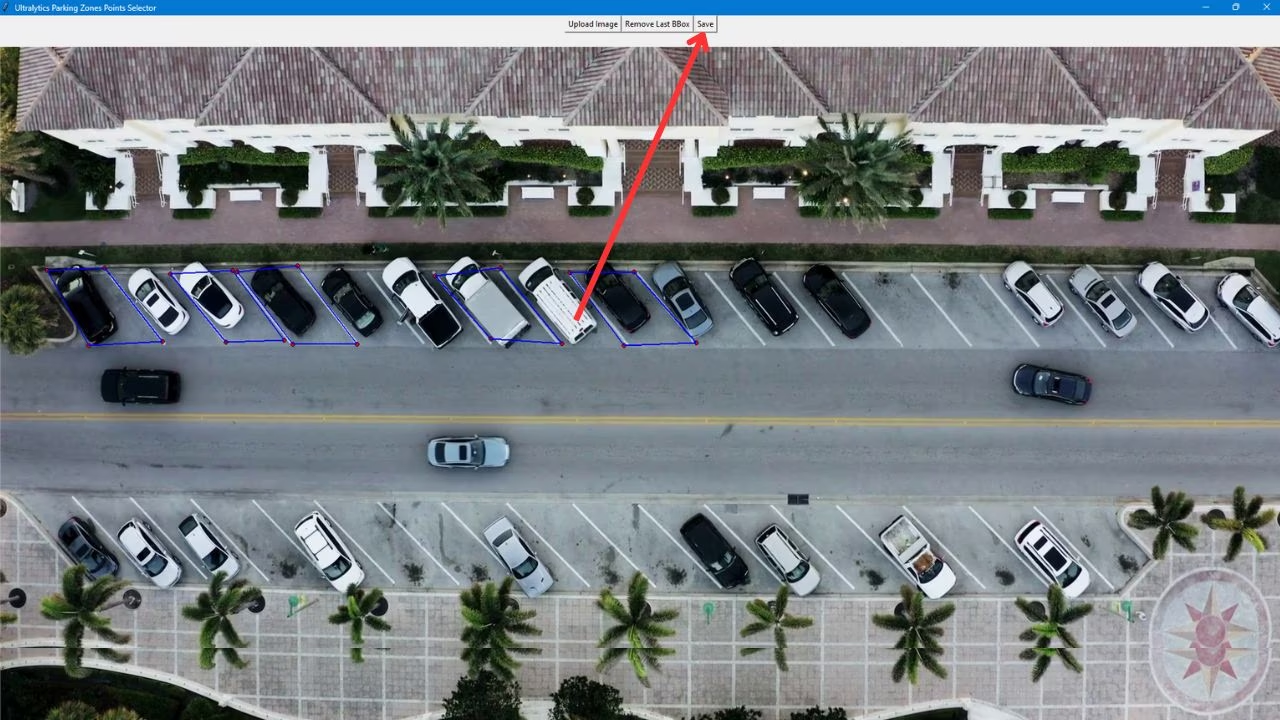
Étape 2 : Utilisez le code fourni pour lancer une interface graphique, où vous pouvez sélectionner une image et commencer à délimiter les zones de stationnement en cliquant avec la souris pour créer des polygones.
Outil d'annotation d'emplacements de parking Ultralytics YOLO
Étape supplémentaire pour l'installation tkinter
Généralement, tkinter est pré-installé avec Python. Cependant, si ce n'est pas le cas, vous pouvez l'installer en suivant les étapes mises en évidence :
- Linux: (Debian/Ubuntu) :
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Architecture:
sudo pacman -S tk - Windows: Réinstallez Python et cochez la case
tcl/tk and IDLEsur Fonctionnalités optionnelles pendant l'installation - MacOS: Réinstallez Python depuis https://www.python.org/downloads/macos/ ou
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Étape 3 : Après avoir défini les zones de stationnement avec des polygones, cliquez sur save pour stocker un fichier JSON contenant les données dans votre répertoire de travail.
Étape 4 : Vous pouvez maintenant utiliser le code fourni pour la gestion du stationnement avec Ultralytics YOLO.
Gestion de parking avec Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Remarque
Commencez par créer des annotations de zones de stationnement à l'aide de ParkingPtsSelection() en Python étape 2 ci-dessus), puis transmettez le fichier JSON à la CLI .
ParkingManagement Arguments
Voici un tableau avec les ParkingManagement arguments :
| Argument | Type | Par défaut | Description |
|---|---|---|---|
model | str | None | Chemin d'accès à un fichier de modèle Ultralytics YOLO. |
json_file | str | None | Chemin d'accès au fichier JSON qui contient toutes les données de coordonnées de stationnement. |
L'argument ParkingManagement la solution permet l'utilisation de plusieurs track paramètres :
| Argument | Type | Par défaut | Description |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Spécifie l'algorithme de suivi à utiliser, par exemple, bytetrack.yaml ou botsort.yaml. |
conf | float | 0.1 | Définit le seuil de confiance pour les détections ; des valeurs plus basses permettent de suivre plus d'objets, mais peuvent inclure de faux positifs. |
iou | float | 0.7 | Définit le seuil Intersection over Union (IoU) pour filtrer les détections qui se chevauchent. |
classes | list | None | Filtre les résultats par index de classe. Par exemple, classes=[0, 2, 3] suit uniquement les classes spécifiées. |
verbose | bool | True | Contrôle l'affichage des résultats de suivi, fournissant une sortie visuelle des objets suivis. |
device | str | None | Spécifie le périphérique pour l'inférence (par exemple, cpu, cuda:0 ou 0). Permet aux utilisateurs de choisir entre le CPU, un GPU spécifique ou d'autres périphériques de calcul pour l'exécution du modèle. |
De plus, les options de visualisation suivantes sont prises en charge :
| Argument | Type | Par défaut | Description |
|---|---|---|---|
show | bool | False | Si True, affiche les images ou vidéos annotées dans une fenêtre. Utile pour un retour visuel immédiat pendant le développement ou les tests. |
line_width | int or None | None | Spécifie la largeur de ligne des boîtes englobantes. Si None, la largeur de ligne est automatiquement ajustée en fonction de la taille de l'image. Fournit une personnalisation visuelle pour plus de clarté. |
FAQ
Comment Ultralytics YOLO26 améliore-t-il les systèmes de gestion de stationnement ?
Ultralytics YOLO26 améliore considérablement les systèmes de gestion de stationnement en offrant une détection et une surveillance des véhicules en temps réel. Cela se traduit par une utilisation optimisée des places de stationnement, une réduction de la congestion et une sécurité accrue grâce à une surveillance continue. Le système de gestion de stationnement permet une circulation fluide, minimisant les temps d'attente et les émissions dans les parkings, contribuant ainsi à la durabilité environnementale. Pour plus de détails, consultez le flux de travail du code de gestion de stationnement.
Quels sont les avantages d'utiliser Ultralytics YOLO26 pour le stationnement intelligent ?
L'utilisation d'Ultralytics YOLO26 pour le stationnement intelligent offre de nombreux avantages :
- Efficacité : Optimise l'utilisation des places de stationnement et diminue la congestion.
- Sûreté et sécurité : Améliore la surveillance et assure la sécurité des véhicules et des piétons.
- Impact environnemental : Aide à réduire les émissions en minimisant les temps d’inactivité des véhicules. Découvrez d’autres avantages dans la section Avantages du système de gestion du stationnement.
Comment puis-je définir des places de stationnement à l'aide d'Ultralytics YOLO26 ?
La définition des places de stationnement est simple avec Ultralytics YOLO26 :
- Capturer une image à partir d'un flux vidéo ou d'une caméra.
- Utilisez le code fourni pour lancer une interface graphique permettant de sélectionner une image et de dessiner des polygones pour définir les places de parking.
- Enregistrez les données étiquetées au format JSON pour un traitement ultérieur. Pour des instructions complètes, consultez la section sur la sélection des points ci-dessus.
Puis-je personnaliser le modèle YOLO26 pour des besoins spécifiques de gestion de stationnement ?
Oui, Ultralytics YOLO26 permet une personnalisation pour des besoins spécifiques de gestion de stationnement. Vous pouvez ajuster des paramètres tels que les couleurs des régions occupées et disponibles, les marges pour l'affichage du texte, et bien plus encore. L'utilisation de ParkingManagement de la classe arguments, vous pouvez adapter le modèle à vos besoins spécifiques, garantissant une efficacité et une efficacité maximales.
Quelles sont quelques applications réelles d'Ultralytics YOLO26 dans la gestion des parkings ?
Ultralytics YOLO26 est utilisé dans diverses applications réelles pour la gestion des parkings, notamment :
- Détection des places de stationnement : Identification précise des places disponibles et occupées.
- Surveillance : Amélioration de la sécurité grâce à la surveillance en temps réel.
- Gestion du flux de trafic : Réduction des temps d’inactivité et de la congestion grâce à une gestion efficace du trafic. Des images présentant ces applications sont disponibles dans applications réelles.






