Ultralytics YOLO26에서 지원하는 컴퓨터 비전 작업
Ultralytics YOLO26은 여러 컴퓨터 비전작업을 지원하는 다재다능한 AI 프레임워크입니다. 이 프레임워크는 detect, segment, OBB, 분류 및 자세 추정을 수행하는 데 사용될 수 있습니다. 각 작업은 서로 다른 목표와 사용 사례를 가지므로, 단일 프레임워크로 다양한 컴퓨터 비전 문제를 해결할 수 있습니다.
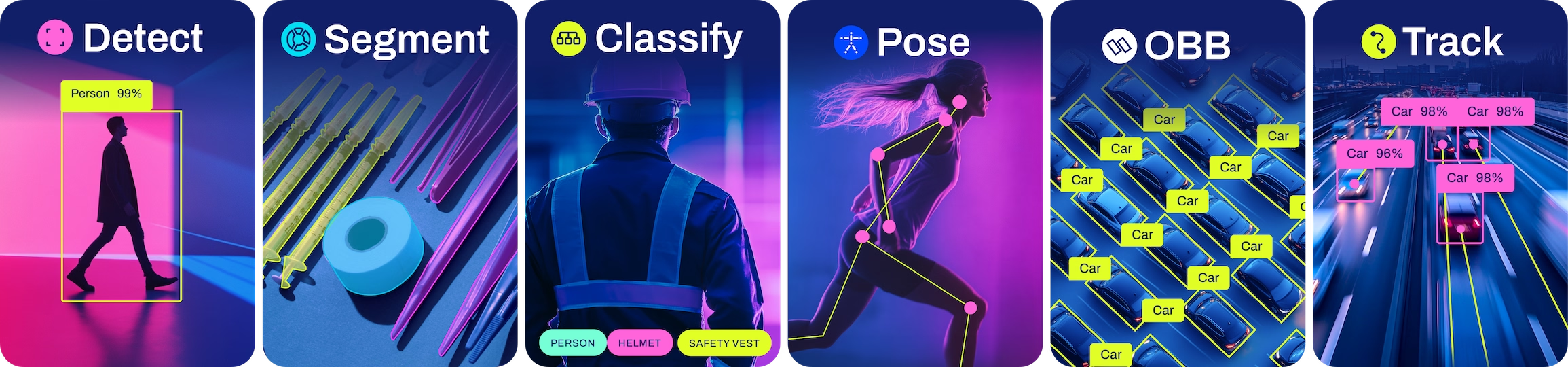
참고: Ultralytics YOLO 작업 살펴보기: 객체 감지, 분할, OBB, 추적 및 자세 추정.
객체 탐지
detect는 YOLO26이 지원하는 주요 작업입니다. 이는 이미지 또는 비디오 프레임에서 객체를 식별하고 그 주위에 바운딩 박스를 그리는 것을 포함합니다. detect된 객체는 특징에 따라 다른 범주로 분류됩니다. YOLO26은 단일 이미지 또는 비디오 프레임에서 여러 객체를 높은 정확도와 속도로 detect할 수 있어, 감시 시스템 및 자율 주행 차량과 같은 실시간 애플리케이션에 이상적입니다.
이미지 분할
segmentation은 각 객체에 대한 픽셀 수준 마스크를 생성하여 객체 detect를 한 단계 더 발전시킵니다. 이러한 정밀도는 의료 영상, 농업 분석 및 제조 품질 관리와 같은 애플리케이션에 유용합니다.
분류
분류는 이미지의 내용을 기반으로 전체 이미지를 범주화하는 것을 포함합니다. 이 작업은 전자상거래의 제품 분류, 콘텐츠 검토 및 야생 동물 모니터링과 같은 애플리케이션에 필수적입니다.
자세 추정
자세 추정은 이미지 또는 비디오 프레임에서 특정 키포인트를 detect하여 움직임을 track하거나 자세를 추정합니다. 이러한 키포인트는 사람의 관절, 얼굴 특징 또는 기타 중요한 관심 지점을 나타낼 수 있습니다. YOLO26은 높은 정확도와 속도로 키포인트 detect에 탁월하여 피트니스 애플리케이션, 스포츠 분석 및 인간-컴퓨터 상호작용에 유용합니다.
OBB
지향성 바운딩 박스(OBB) detect는 회전된 객체를 더 잘 찾기 위해 방향 각도를 추가하여 기존 객체 detect를 향상시킵니다. 이 기능은 객체가 다양한 각도로 나타나는 항공 이미지 분석, 문서 처리 및 산업 애플리케이션에 특히 유용합니다. YOLO26은 다양한 시나리오에서 회전된 객체를 detect하는 데 높은 정확도와 속도를 제공합니다.
결론
Ultralytics YOLO26은 detect, segment, 분류, 지향성 객체 detect 및 키포인트 detect를 포함한 여러 컴퓨터 비전 작업을 지원합니다. 각 작업은 기본적인 객체 식별부터 상세한 자세 분석에 이르기까지 컴퓨터 비전 분야의 특정 요구 사항을 해결합니다. 각 작업의 기능과 적용 분야를 이해함으로써 특정 컴퓨터 비전 문제에 가장 적합한 접근 방식을 선택하고 YOLO26의 강력한 기능을 활용하여 효과적인 솔루션을 구축할 수 있습니다.
FAQ
Ultralytics YOLO26은 어떤 컴퓨터 비전 작업을 수행할 수 있나요?
Ultralytics YOLO26은 높은 정확도와 속도로 다양한 컴퓨터 비전 작업을 수행할 수 있는 다재다능한 AI 프레임워크입니다. 이러한 작업에는 다음이 포함됩니다:
- 객체 탐지: 이미지 또는 비디오 프레임에서 객체 주변에 경계 상자를 그려 객체를 식별하고 위치를 파악합니다.
- 이미지 분할: 의료 영상과 같은 애플리케이션에 유용한 콘텐츠를 기반으로 이미지를 여러 영역으로 분할합니다.
- 분류: 이미지 내용에 따라 전체 이미지를 분류하는 것.
- Pose estimation: 이미지 또는 비디오 프레임에서 특정 키포인트를 detect하여 움직임 또는 포즈를 track합니다.
- 방향이 지정된 객체 탐지(OBB): 향상된 정확도를 위해 추가된 방향 각도로 회전된 객체를 감지합니다.
객체 detect를 위해 Ultralytics YOLO26을 어떻게 사용하나요?
객체 detect를 위해 Ultralytics YOLO26을 사용하려면 다음 단계를 따르세요:
- 데이터 세트를 적절한 형식으로 준비합니다.
- detect 작업을 사용하여 YOLO26 모델을 훈련하세요.
- 새 이미지 또는 비디오 프레임을 입력하여 모델을 사용해 예측을 수행합니다.
예시
from ultralytics import YOLO
# Load a pretrained YOLO model (adjust model type as needed)
model = YOLO("yolo26n.pt") # n, s, m, l, x versions available
# Perform object detection on an image
results = model.predict(source="image.jpg") # Can also use video, directory, URL, etc.
# Display the results
results[0].show() # Show the first image results
# Run YOLO detection from the command line
yolo detect model=yolo26n.pt source="image.jpg" # Adjust model and source as needed
자세한 내용은 탐지 예제를 참조하세요.
segmentation 작업에 YOLO26을 사용하는 것의 이점은 무엇인가요?
segment 작업을 위해 YOLO26을 사용하면 다음과 같은 여러 이점이 있습니다:
- 높은 정확도: 세그멘테이션 작업은 정밀한 픽셀 수준의 마스크를 제공합니다.
- 속도: YOLO26은 실시간 애플리케이션에 최적화되어 고해상도 이미지에서도 빠른 처리를 제공합니다.
- 다양한 응용 분야: 의료 영상, 자율 주행 및 상세한 이미지 분할이 필요한 기타 애플리케이션에 이상적입니다.
이미지 segment 섹션에서 segment를 위한 YOLO26의 이점과 사용 사례에 대해 자세히 알아보세요.
Ultralytics YOLO26이 자세 추정 및 키포인트 detect를 처리할 수 있나요?
네, Ultralytics YOLO26은 높은 정확도와 속도로 자세 추정 및 키포인트 detect를 효과적으로 수행할 수 있습니다. 이 기능은 스포츠 분석, 헬스케어 및 인간-컴퓨터 상호작용 애플리케이션에서 움직임을 track하는 데 특히 유용합니다. YOLO26은 이미지 또는 비디오 프레임에서 키포인트를 detect하여 정밀한 자세 추정을 가능하게 합니다.
자세한 내용 및 구현 팁은 포즈 추정 예제를 참조하세요.
지향성 객체 detect(OBB)를 위해 Ultralytics YOLO26을 선택해야 하는 이유는 무엇인가요?
YOLO26을 사용한 지향성 객체 detect(OBB)는 추가 각도 매개변수로 객체를 detect하여 향상된 정밀도를 제공합니다. 이 기능은 항공 이미지 분석 및 창고 자동화와 같이 회전된 객체의 정확한 위치 파악이 필요한 애플리케이션에 유용합니다.
- 정밀도 향상: 각도 구성 요소는 회전된 객체에 대한 오탐지율을 줄입니다.
- 다재다능한 응용 분야: 지리 공간 분석, 로봇 공학 등의 작업에 유용합니다.
자세한 내용과 예제는 Oriented Object Detection 섹션을 참조하세요.






