NVIDIA Jetson'da DeepStream SDK ve TensorRT kullanarak Ultralytics YOLO26
İzle: Ultralytics YOLO26 modellerini Jetson Orin NX üzerinde NVIDIA Deepstream ile nasıl kullanırım 🚀
Bu kapsamlı kılavuz, DeepStream SDK ve TensorRT kullanarak Ultralytics YOLO26'yı NVIDIA Jetson cihazlarına dağıtmak için ayrıntılı bir yol haritası sunar. Burada, Jetson platformunda çıkarım performansını en üst düzeye çıkarmak için TensorRT kullanıyoruz.
Not
Bu kılavuz, NVIDIA Jetson Orin Nano Süper Geliştirici Kiti ile JP6.1'in en son kararlı JetPack sürümü, NVIDIA Jetson Orin NX 16GB tabanlı Seeed Studio reComputer J4012 JP5.1.3 JetPack sürümü ve NVIDIA Jetson Nano 4GB tabanlı Seeed Studio reComputer J1020 v2 JP4.6.4 JetPack sürümü ile test edilmiştir. En yeni ve eski olanlar da dahil olmak üzere tüm NVIDIA Jetson donanım serisinde çalışması beklenmektedir.
NVIDIA DeepStream nedir?
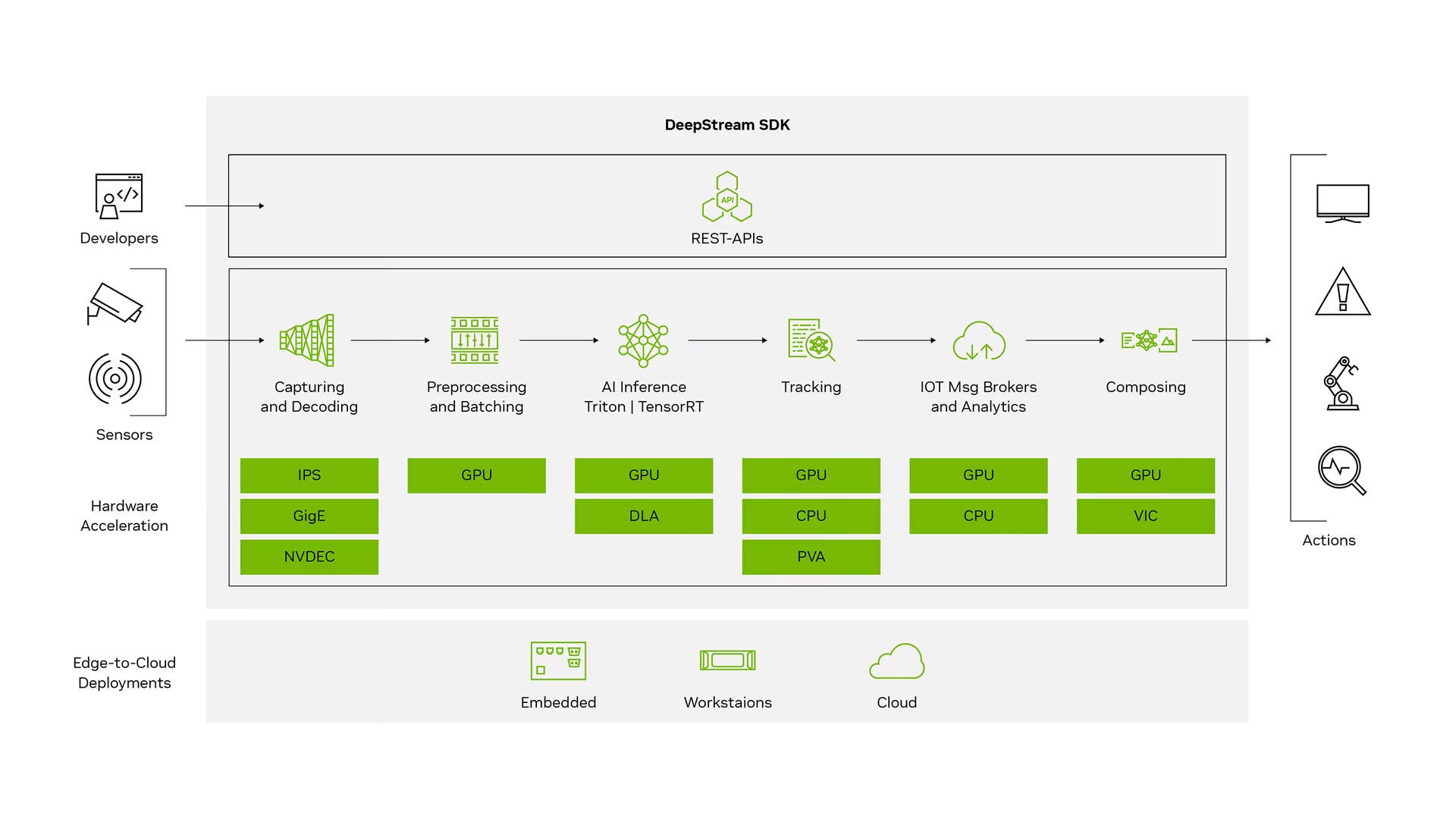
NVIDIA'nın DeepStream SDK'sı, yapay zeka tabanlı çoklu sensör işleme, video, ses ve görüntü anlama için GStreamer tabanlı eksiksiz bir akış analitiği araç setidir. IVA (Akıllı Video Analitiği) uygulamaları ve hizmetleri geliştiren vizyon yapay zeka geliştiricileri, yazılım ortakları, yeni başlayanlar ve OEM'ler için idealdir. Artık sinir ağları ve izleme, video kodlama/kod çözme ve video oluşturma gibi diğer karmaşık işleme görevlerini içeren akış işleme hatları oluşturabilirsiniz. Bu işlem hatları, video, görüntü ve sensör verileri üzerinde gerçek zamanlı analiz sağlar. DeepStream'in çoklu platform desteği, şirket içinde, uçta ve bulutta vizyon yapay zeka uygulamaları ve hizmetleri geliştirmenin daha hızlı ve kolay bir yolunu sunar.
Ön koşullar
Bu kılavuzu takip etmeye başlamadan önce:
- NVIDIA Jetson cihazınızı Ultralytics YOLO26 ile kurmak için belgelerimizi, Hızlı Başlangıç Kılavuzu: NVIDIA Jetson ve Ultralytics YOLO26 bölümünü ziyaret edin.
- Kurulum DeepStream SDK JetPack sürümüne göre
- JetPack 4.6.4 için DeepStream 6.0.1'i kurun
- JetPack 5.1.3 için DeepStream 6.3'ü kurun
- JetPack 6.1 için DeepStream 7.1'i yükleyin
- JetPack 7.1 için DeepStream 9.0'ı yükleyin
İpucu
Bu kılavuzda, DeepStream SDK'yı Jetson cihazına kurmak için Debian paket yöntemini kullandık. DeepStream'in eski sürümlerine erişmek için Jetson'da DeepStream SDK (Arşivlenmiş) sayfasını da ziyaret edebilirsiniz.
YOLO26 için DeepStream Yapılandırması
Burada, YOLO modelleri için NVIDIA DeepStream SDK desteği içeren marcoslucianops/DeepStream-Yolo GitHub deposunu kullanıyoruz. Katkılarından dolayı marcoslucianops'a teşekkür ederiz!
Gerekli bağımlılıklarla birlikte Ultralytics'i kurun
cd ~ pip install -U pip git clone https://github.com/ultralytics/ultralytics cd ultralytics pip install -e ".[export]" onnxslimDeepStream-Yolo deposunu klonlayın
cd ~ git clone https://github.com/marcoslucianops/DeepStream-YoloKopyala
export_yolo26.pydosyası şuradan:DeepStream-Yolo/utilsdizinineultralyticsklasörcp ~/DeepStream-Yolo/utils/export_yolo26.py ~/ultralytics cd ultralyticsSeçtiğiniz Ultralytics YOLO26 tespit modelini (.pt) YOLO26 sürümlerinden indirin. Burada yolo26s.pt kullanıyoruz.
wget https://github.com/ultralytics/assets/releases/download/v8.4.0/yolo26s.ptNot
Ayrıca özel olarak eğitilmiş bir YOLO26 modeli de kullanabilirsiniz.
Modeli ONNX'e dönüştür
python3 export_yolo26.py -w yolo26s.ptYukarıdaki komuta aşağıdaki argümanları geçirin
DeepStream 5.1 için şunu kaldırın:
--dynamicargümanını kullanınopset12 veya daha düşük. Varsayılanopset17'dir.--opset 12Çıkarım boyutunu değiştirmek için (varsayılan: 640)
-s SIZE --size SIZE -s HEIGHT WIDTH --size HEIGHT WIDTH1280 için örnek:
-s 1280 or -s 1280 1280ONNX modelini basitleştirmek için (DeepStream >= 6.0)
--simplifyDinamik toplu iş boyutunu kullanmak için (DeepStream >= 6.1)
--dynamicStatik toplu iş boyutunu kullanmak için (toplu iş boyutu = 4 örneği)
--batch 4Oluşturulanı kopyala
.onnxmodel dosyası velabels.txtdosyasını şuna:DeepStream-Yoloklasörcp yolo26s.pt.onnx labels.txt ~/DeepStream-Yolo cd ~/DeepStream-YoloCUDA sürümünü, kurulu JetPack sürümüne göre ayarlayın
JetPack 4.6.4 için:
export CUDA_VER=10.2JetPack 5.1.3 için:
export CUDA_VER=11.4JetPack 6.1 için:
export CUDA_VER=12.6Kütüphaneyi derleyin
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_YoloŞunu düzenle:
config_infer_primary_yolo26.txtmodelinize göre dosya (80 sınıflı YOLO26s için)[property] ... onnx-file=yolo26s.pt.onnx ... num-detected-classes=80 ...Şunu düzenle:
deepstream_app_configdosyası... [primary-gie] ... config-file=config_infer_primary_yolo26.txtAyrıca video kaynağını da değiştirebilirsiniz:
deepstream_app_configdosyası. Burada, varsayılan bir video dosyası yüklenir... [source0] ... uri=file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
Çıkarım Çalıştır
deepstream-app -c deepstream_app_config.txt
Not
Çıkarıma başlamadan önce TensorRT motor dosyasını oluşturmak uzun zaman alacaktır. Lütfen sabırlı olun.

İpucu
Modeli FP16 hassasiyetine dönüştürmek istiyorsanız, sadece şunu ayarlayın: model-engine-file=model_b1_gpu0_fp16.engine ve network-mode=2 içinde config_infer_primary_yolo26.txt
INT8 Kalibrasyonu
Çıkarım için INT8 hassasiyetini kullanmak istiyorsanız, aşağıdaki adımları izlemeniz gerekir:
Not
Şu anda INT8, TensorRT 10.x ile çalışmamaktadır. Bu kılavuzun bu bölümü, çalışması beklenen TensorRT 8.x ile test edilmiştir.
Ayarla
OPENCVortam değişkeniexport OPENCV=1Kütüphaneyi derleyin
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_YoloCOCO veri kümesi için şunu indirin: val2017, ayıkla ve taşı
DeepStream-YoloklasörKalibrasyon görüntüleri için yeni bir dizin oluşturun
mkdir calibrationKalibrasyonu çalıştırmak için COCO veri kümesinden rastgele 1000 resim seçmek için aşağıdakileri çalıştırın
for jpg in $(ls -1 val2017/*.jpg | sort -R | head -1000); do cp ${jpg} calibration/ doneNot
NVIDIA, iyi bir doğruluk elde etmek için en az 500 resim önerir. Bu örnekte, daha iyi doğruluk elde etmek için 1000 resim seçilmiştir (daha fazla resim = daha fazla doğruluk). Bunu head -1000 komutuyla ayarlayabilirsiniz. Örneğin, 2000 resim için head -2000 komutunu kullanın. Bu işlem uzun zaman alabilir.
Şunu oluştur:
calibration.txttüm seçilen görüntüleri içeren dosyarealpath calibration/*jpg > calibration.txtOrtam değişkenlerini ayarla
export INT8_CALIB_IMG_PATH=calibration.txt export INT8_CALIB_BATCH_SIZE=1Not
Daha yüksek INT8_CALIB_BATCH_SIZE değerleri, daha fazla doğruluk ve daha hızlı kalibrasyon hızı sağlayacaktır. GPU belleğinize göre ayarlayın.
Şunu Güncelle
config_infer_primary_yolo26.txtdosyasıŞuradan:
... model-engine-file=model_b1_gpu0_fp32.engine #int8-calib-file=calib.table ... network-mode=0 ...Şunu
... model-engine-file=model_b1_gpu0_int8.engine int8-calib-file=calib.table ... network-mode=1 ...
Çıkarım Çalıştır
deepstream-app -c deepstream_app_config.txt
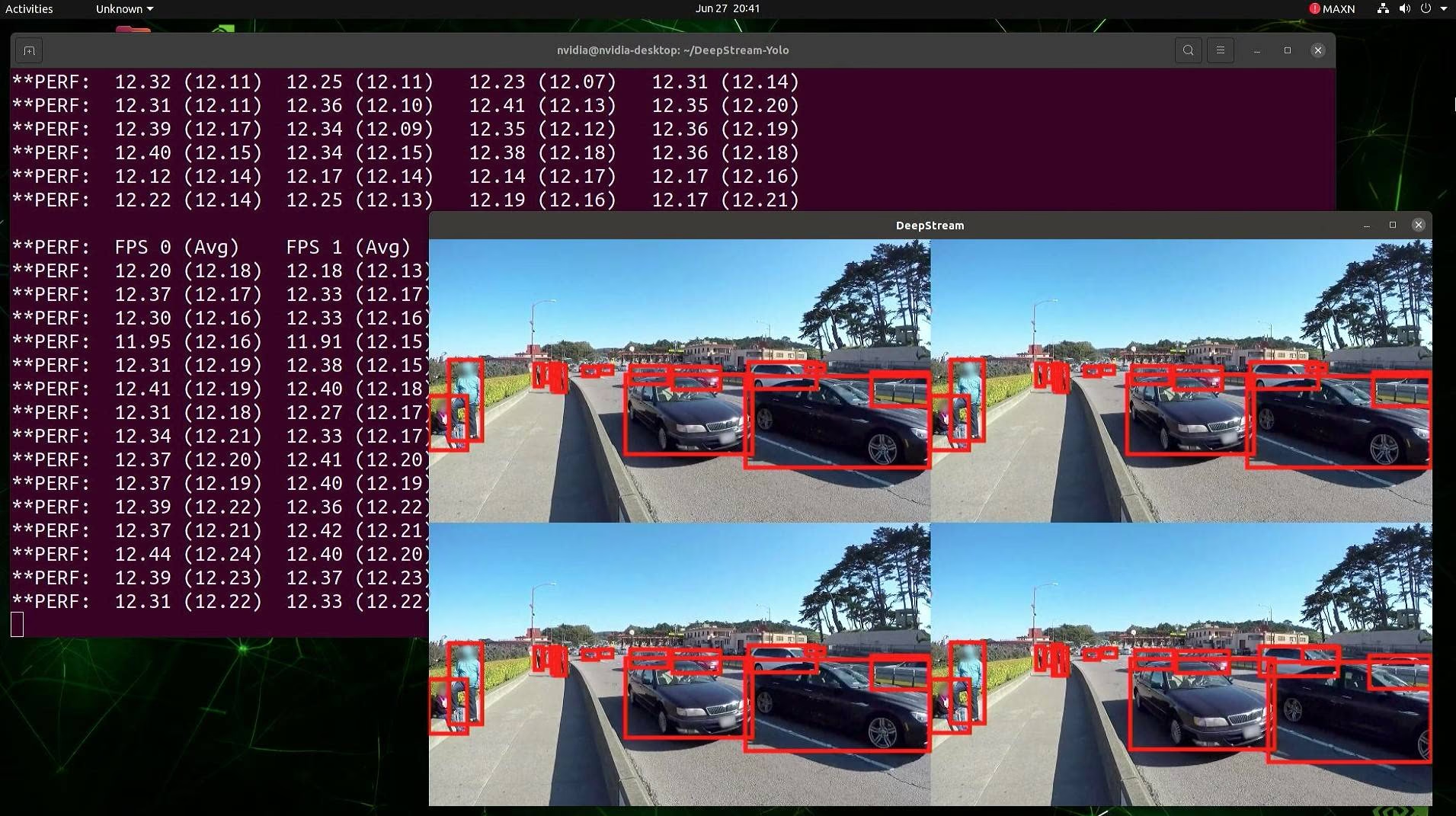
Çoklu Akış Kurulumu
İzle: Jetson Orin'de NVIDIA kullanarak Ultralytics ile Çoklu Akışlı Çıkarım Nasıl Çalıştırılır 🚀
Tek bir DeepStream uygulaması altında birden çok akış ayarlamak için, deepstream_app_config.txt dosyası:
Sahip olmak istediğiniz akış sayısına göre satırları ve sütunları değiştirerek bir ızgara ekranı oluşturun. Örneğin, 4 akış için 2 satır ve 2 sütun ekleyebiliriz.
[tiled-display] rows=2 columns=2Ayarla
num-sources=4ve şunu ekleyin:uridört akışın tümü için girişler.[source0] enable=1 type=3 uri=path/to/video1.jpg uri=path/to/video2.jpg uri=path/to/video3.jpg uri=path/to/video4.jpg num-sources=4
Çıkarım Çalıştır
deepstream-app -c deepstream_app_config.txt
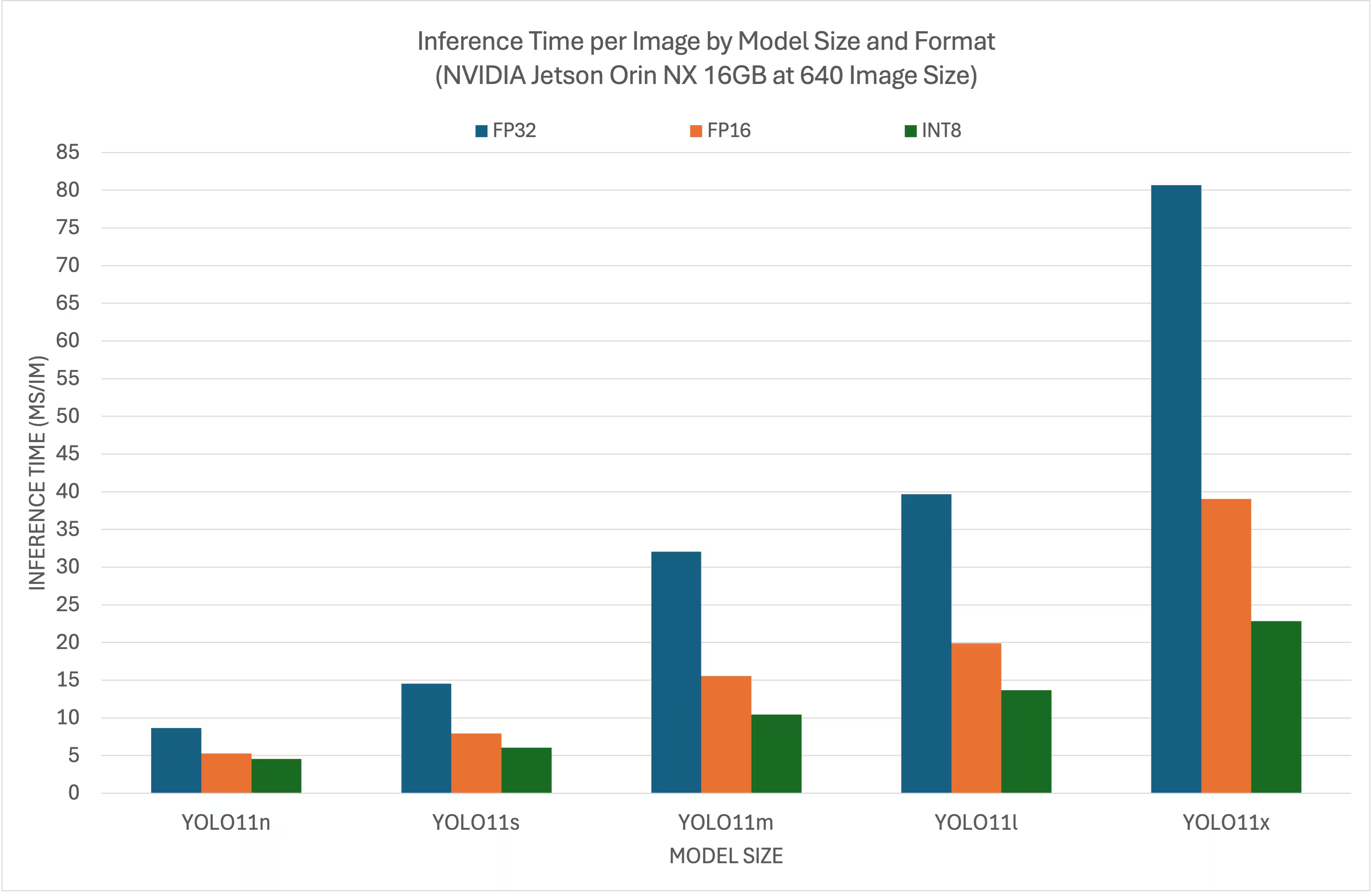
Karşılaştırma Sonuçları
Aşağıdaki karşılaştırmalar, YOLO26 modellerinin NVIDIA Jetson Orin NX 16GB üzerinde 640x640 giriş boyutuyla farklı TensorRT hassasiyet seviyelerinde nasıl performans gösterdiğini özetlemektedir.
Karşılaştırma Tablosu
Detaylı Karşılaştırma Tablosu
Performans
| Format | Durum | Çıkarım süresi (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 8.64 |
| TensorRT (FP16) | ✅ | 5.27 |
| TensorRT (INT8) | ✅ | 4.54 |
| Format | Durum | Çıkarım süresi (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 14.53 |
| TensorRT (FP16) | ✅ | 7.91 |
| TensorRT (INT8) | ✅ | 6.05 |
| Format | Durum | Çıkarım süresi (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 32.05 |
| TensorRT (FP16) | ✅ | 15.55 |
| TensorRT (INT8) | ✅ | 10.43 |
| Format | Durum | Çıkarım süresi (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 39.68 |
| TensorRT (FP16) | ✅ | 19.88 |
| TensorRT (INT8) | ✅ | 13.64 |
| Format | Durum | Çıkarım süresi (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 80.65 |
| TensorRT (FP16) | ✅ | 39.06 |
| TensorRT (INT8) | ✅ | 22.83 |
Teşekkür
Bu kılavuz ilk olarak Seeed Studio'daki arkadaşlarımız Lakshantha ve Elaine tarafından oluşturulmuştur.
SSS
Bir NVIDIA Jetson cihazında Ultralytics YOLO26'yı nasıl kurarım?
Ultralytics YOLO26'yı bir NVIDIA Jetson cihazına kurmak için öncelikle JetPack sürümünüzle uyumlu DeepStream SDK'yı yüklemeniz gerekir. NVIDIA Jetson'ınızı YOLO26 dağıtımı için yapılandırmak üzere Hızlı Başlangıç Kılavuzumuzdaki adım adım talimatları izleyin.
NVIDIA Jetson'da YOLO26 ile TensorRT kullanmanın faydası nedir?
TensorRT'yi YOLO26 ile kullanmak, modeli çıkarım için optimize eder, NVIDIA Jetson cihazlarında gecikmeyi önemli ölçüde azaltır ve verimi artırır. TensorRT, katman birleştirme, hassasiyet kalibrasyonu ve çekirdek otomatik ayarlama yoluyla yüksek performanslı, düşük gecikmeli derin öğrenme çıkarımı sağlar. Bu, özellikle video analizi ve otonom makineler gibi gerçek zamanlı uygulamalar için faydalı olan daha hızlı ve daha verimli yürütmeye yol açar.
Ultralytics YOLO26'yı farklı NVIDIA Jetson donanımlarında DeepStream SDK ile çalıştırabilir miyim?
Evet, Ultralytics YOLO26'yı DeepStream SDK ve TensorRT ile dağıtma kılavuzu, tüm NVIDIA Jetson ürün yelpazesiyle uyumludur. Buna JetPack 5.1.3 yüklü Jetson Orin NX 16GB ve JetPack 4.6.4 yüklü Jetson Nano 4GB gibi cihazlar dahildir. Ayrıntılı adımlar için YOLO26 için DeepStream Yapılandırması bölümüne bakın.
Bir YOLO26 modelini DeepStream için ONNX formatına nasıl dönüştürebilirim?
Bir YOLO26 modelini DeepStream ile dağıtım için ONNX formatına dönüştürmek için şunu kullanın: utils/export_yolo26.py şu komut dosyası: DeepStream-Yolo deposu.
İşte bir örnek komut:
python3 utils/export_yolo26.py -w yolo26s.pt --opset 12 --simplify
Model dönüştürme hakkında daha fazla bilgi için model dışa aktarma bölümümüze göz atın.
NVIDIA Jetson Orin NX üzerinde YOLO için performans kıyaslamaları nelerdir?
YOLO26 modellerinin NVIDIA Jetson Orin NX 16GB üzerindeki performansı, TensorRT hassasiyet seviyelerine göre değişir. Örneğin, YOLO26s modelleri şunları başarır:
- FP32 Hassasiyeti: 14.6 ms/im, 68.5 FPS
- FP16 Hassasiyeti: 7.94 ms/im, 126 FPS
- INT8 Hassasiyeti: 5,95 ms/im, 168 FPS
Bu karşılaştırmalar, TensorRT optimize edilmiş YOLO26 modellerinin NVIDIA Jetson donanımında kullanımının verimliliğini ve yeteneğini vurgulamaktadır. Daha fazla ayrıntı için Karşılaştırma Sonuçları bölümümüze bakın.








