Link to this sectionGeschwindigkeitsschätzung mit Ultralytics YOLO26 🚀#
Link to this sectionWas ist Geschwindigkeitsschätzung?#
Geschwindigkeitsschätzung ist der Prozess der Berechnung der Bewegungsgeschwindigkeit eines Objekts innerhalb eines bestimmten Kontextes und wird häufig in Computer Vision-Anwendungen eingesetzt. Mit Ultralytics YOLO26 kannst du nun die Geschwindigkeit von Objekten mittels Objektverfolgung zusammen mit Entfernungs- und Zeitdaten berechnen, was für Aufgaben wie Verkehrsüberwachung und Sicherheit entscheidend ist. Die Genauigkeit der Geschwindigkeitsschätzung beeinflusst direkt die Effizienz und Zuverlässigkeit verschiedener Anwendungen und ist somit eine Schlüsselkomponente für die Weiterentwicklung intelligenter Systeme und Echtzeit-Entscheidungsprozesse.
Watch: Speed Estimation using Ultralytics YOLO26
Für tiefere Einblicke in die Geschwindigkeitsschätzung schau dir unseren Blogbeitrag an: Ultralytics YOLO for Speed Estimation in Computer Vision Projects
Link to this sectionVorteile der Geschwindigkeitsschätzung#
- Effiziente Verkehrssteuerung: Eine genaue Geschwindigkeitsschätzung hilft dabei, den Verkehrsfluss zu managen, die Sicherheit zu erhöhen und Staus auf Straßen zu reduzieren.
- Präzise autonome Navigation: In autonomen Systemen wie selbstfahrenden Autos sorgt eine zuverlässige Geschwindigkeitsmessung für eine sichere und genaue Fahrzeugnavigation.
- Verbesserte Überwachungssicherheit: Die Geschwindigkeitsschätzung in der Überwachungsanalyse hilft, ungewöhnliches Verhalten oder potenzielle Bedrohungen zu identifizieren, was die Effektivität von Sicherheitsmaßnahmen verbessert.
Link to this sectionPraxisanwendungen#
| Transportwesen | Transportwesen |
|---|---|
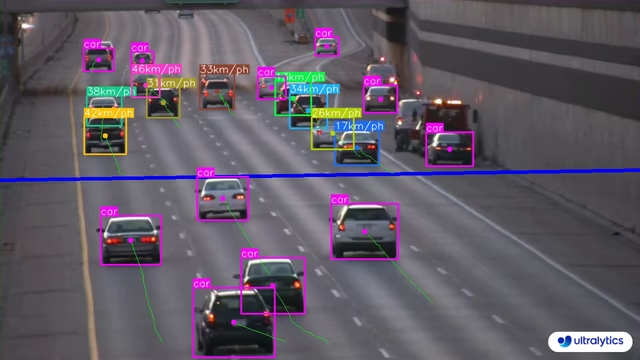 | 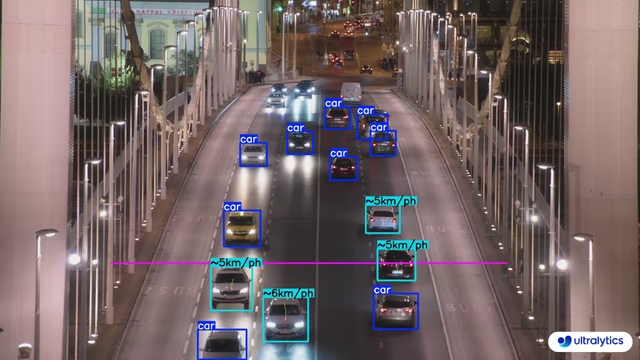 |
| Geschwindigkeitsschätzung auf der Straße mit Ultralytics YOLO26 | Geschwindigkeitsschätzung auf einer Brücke mit Ultralytics YOLO26 |
Geschwindigkeit ist eine Schätzung
Die Geschwindigkeit ist eine Schätzung und möglicherweise nicht vollkommen genau. Zudem kann die Schätzung je nach Kameraspezifikationen und damit verbundenen Faktoren variieren.
Link to this sectionGeschwindigkeit mit YOLO26 schätzen#
Die SpeedEstimator-Lösung verfolgt jedes Objekt über Bilder hinweg und rechnet dessen Pixelverschiebung mithilfe der Videobildrate (fps) und eines realen Maßstabs (meter_per_pixel) in eine Geschwindigkeit um. Passe meter_per_pixel an dein Kamera-Setup an und verwende max_speed, um Ausreißer aus verrauschten Tracks zu begrenzen.
# Run a speed example
yolo solutions speed show=True
# Pass a source video
yolo solutions speed source="path/to/video.mp4"
# Adjust meter per pixel value based on camera configuration
yolo solutions speed meter_per_pixel=0.05Link to this sectionSpeedEstimator-Argumente#
Hier ist eine Tabelle mit den SpeedEstimator-Argumenten:
| Argument | Typ | Standard | Beschreibung |
|---|---|---|---|
model | str | None | Pfad zu einer Ultralytics YOLO-Modelldatei. |
fps | float | 30.0 | Bilder pro Sekunde für Geschwindigkeitsberechnungen. |
max_hist | int | 5 | Maximale Anzahl historischer Punkte pro Objekt für Geschwindigkeits-/Richtungsberechnungen. |
meter_per_pixel | float | 0.05 | Skalierungsfaktor für die Umrechnung von Pixelabständen in reale Einheiten. |
max_speed | int | 120 | Maximales Geschwindigkeitslimit in visuellen Overlays (verwendet für Warnungen). |
Die SpeedEstimator-Lösung ermöglicht die Verwendung von track-Parametern:
| Argument | Typ | Standard | Beschreibung |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Legt den zu verwendenden Tracking-Algorithmus fest. Integrierte Optionen: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Legt den Konfidenz-Schwellenwert für Detektionen fest; niedrigere Werte ermöglichen die Verfolgung von mehr Objekten, können aber zu falsch-positiven Ergebnissen führen. |
iou | float | 0.7 | Legt den IoU-Schwellenwert für das Filtern überlappender Detektionen fest. |
classes | list | None | Filtert Ergebnisse nach Klassenindex. Zum Beispiel verfolgt classes=[0, 2, 3] nur die angegebenen Klassen. |
verbose | bool | True | Steuert die Anzeige der Tracking-Ergebnisse und bietet eine visuelle Ausgabe der verfolgten Objekte. |
device | str | None | Gibt das Gerät für die Inferenz an (z. B. cpu, cuda:0 oder 0). Ermöglicht die Wahl zwischen CPU, einer spezifischen GPU oder anderen Rechengeräten für die Modellausführung. |
Zusätzlich werden die folgenden Visualisierungsoptionen unterstützt:
| Argument | Typ | Standard | Beschreibung |
|---|---|---|---|
show | bool | False | Wenn True, werden die annotierten Bilder oder Videos in einem Fenster angezeigt. Nützlich für sofortiges visuelles Feedback während der Entwicklung oder Tests. |
line_width | int or None | None | Legt die Linienbreite der BBoxen fest. Wenn None, wird die Linienbreite automatisch basierend auf der Bildgröße angepasst. Bietet visuelle Anpassungsmöglichkeiten für mehr Klarheit. |
show_conf | bool | True | Zeigt den Konfidenzwert für jede Erkennung neben dem Label an. Bietet Einblick in die Gewissheit des Modells für jede Erkennung. |
show_labels | bool | True | Zeigt Labels für jede Erkennung in der visuellen Ausgabe an. Ermöglicht ein sofortiges Verständnis der erkannten Objekte. |
Link to this sectionFAQ#
Link to this sectionWie schätze ich die Objektgeschwindigkeit mit Ultralytics YOLO26?#
Das Schätzen der Objektgeschwindigkeit mit Ultralytics YOLO26 kombiniert Objekterkennung und Tracking. Das Modell erkennt Objekte in jedem Bild, verfolgt sie über Bilder hinweg und rechnet die zwischen den Bildern zurückgelegte Distanz mithilfe der Bildrate und des meter_per_pixel-Maßstabs in eine Geschwindigkeit um. Das Python-Beispiel oben führt diese komplette Pipeline aus – übergib dein Video und passe meter_per_pixel an deine Kamera an. Weitere Hintergründe findest du in unserem offiziellen Blog-Beitrag.
Link to this sectionWas sind die Vorteile der Verwendung von Ultralytics YOLO26 für die Geschwindigkeitsschätzung im Verkehrsmanagement?#
Die Verwendung von Ultralytics YOLO26 für die Geschwindigkeitsschätzung bietet signifikante Vorteile im Verkehrsmanagement:
- Erhöhte Sicherheit: Schätze Fahrzeuggeschwindigkeiten genau ein, um überhöhte Geschwindigkeit zu erkennen und die Verkehrssicherheit zu verbessern.
- Echtzeitüberwachung: Profitiere von der Echtzeit-Objekterkennungsfähigkeit von YOLO26, um den Verkehrsfluss und Staus effektiv zu überwachen.
- Skalierbarkeit: Implementiere das Modell auf verschiedenen Hardware-Setups, von Edge-Geräten bis hin zu Servern, um flexible und skalierbare Lösungen für Implementierungen in großem Maßstab sicherzustellen.
Für weitere Anwendungen siehe Vorteile der Geschwindigkeitsschätzung.
Link to this sectionKann YOLO26 mit anderen KI-Frameworks wie TensorFlow oder PyTorch integriert werden?#
Ja, YOLO26 kann mit anderen KI-Frameworks wie TensorFlow und PyTorch integriert werden. Ultralytics bietet Unterstützung für den Export von YOLO26-Modellen in verschiedene Formate wie ONNX, TensorRT und CoreML, was eine reibungslose Interoperabilität mit anderen ML-Frameworks sicherstellt.
Um ein YOLO26-Modell in das ONNX-Format zu exportieren:
yolo export model=yolo26n.pt format=onnxErfahre mehr über den Export von Modellen in unserem Export-Leitfaden.
Link to this sectionWie genau ist die Geschwindigkeitsschätzung mit Ultralytics YOLO26?#
Die Genauigkeit der Geschwindigkeitsschätzung mit Ultralytics YOLO26 hängt von mehreren Faktoren ab, darunter die Qualität der Objektverfolgung, die Auflösung und Bildrate des Videos sowie Umgebungsbedingungen. Während der Geschwindigkeitsschätzer zuverlässige Werte liefert, ist er aufgrund von Schwankungen bei der Frame-Verarbeitungsgeschwindigkeit und Objektverdeckungen möglicherweise nicht zu 100 % genau.
Hinweis: Berücksichtige immer einen Fehlertoleranzbereich und validiere die Schätzungen nach Möglichkeit mit Ground-Truth-Daten.
Für weitere Tipps zur Verbesserung der Genauigkeit, schau dir den Abschnitt zu den SpeedEstimator-Argumenten an.