Ultralytics YOLO11
Visión general
YOLO11 fue lanzado por Ultralytics el 10 de septiembre de 2024, ofreciendo una excelente precisión, velocidad y eficiencia. Basándose en los impresionantes avances de las versiones anteriores de YOLO, YOLO11 introduce mejoras significativas en la arquitectura y los métodos de entrenamiento, lo que lo convierte en una opción versátil para una amplia gama de tareas de visión por computadora. Para el último modelo de Ultralytics con inferencia de extremo a extremo sin NMS y despliegue optimizado en el borde, consulte YOLO26.
Ultralytics YOLO11 🚀 Podcast generado por NotebookLM
Ver: Cómo utilizar Ultralytics YOLO11 para la detección y el seguimiento de objetos | Cómo realizar pruebas comparativas | YOLO11 LANZADO🚀
Probar en la Plataforma Ultralytics
Explore y ejecute modelos YOLO11 directamente en la Plataforma Ultralytics.
Características clave
- Extracción de características mejorada: YOLO11 emplea una red troncal y una arquitectura de cuello de botella mejoradas, lo que mejora las capacidades de extracción de características para una detección de objetos más precisa y un rendimiento de tareas complejas.
- Optimizado para la eficiencia y la velocidad: YOLO11 introduce diseños arquitectónicos refinados y canalizaciones de entrenamiento optimizadas, que ofrecen velocidades de procesamiento más rápidas y mantienen un equilibrio óptimo entre precisión y rendimiento.
- Mayor precisión con menos parámetros: Con los avances en el diseño de modelos, YOLO11m logra una Precisión Media Promedio (mAP) más alta en el conjunto de datos COCO, al tiempo que utiliza un 22% menos de parámetros que YOLOv8m, lo que lo hace computacionalmente eficiente sin comprometer la precisión.
- Adaptabilidad en todos los entornos: YOLO11 se puede implementar sin problemas en varios entornos, incluidos dispositivos de borde, plataformas en la nube y sistemas que admiten GPU de NVIDIA, lo que garantiza la máxima flexibilidad.
- Amplia gama de tareas admitidas: Ya sea detección de objetos, segmentación de instancias, clasificación de imágenes, estimación de poses o detección de objetos orientados (OBB), YOLO11 está diseñado para satisfacer un conjunto diverso de desafíos de visión artificial.
Tareas y modos admitidos
YOLO11 se basa en la versátil gama de modelos establecida por las versiones anteriores de Ultralytics YOLO, ofreciendo un soporte mejorado en varias tareas de visión artificial:
| Modelo | Nombres de archivo | Tarea | Inferencia | Validación | Entrenamiento | Exportar |
|---|---|---|---|---|---|---|
| YOLO11 | yolo11n.pt yolo11s.pt yolo11m.pt yolo11l.pt yolo11x.pt | Detección | ✅ | ✅ | ✅ | ✅ |
| YOLO11-seg | yolo11n-seg.pt yolo11s-seg.pt yolo11m-seg.pt yolo11l-seg.pt yolo11x-seg.pt | Segmentación de instancias | ✅ | ✅ | ✅ | ✅ |
| YOLO11-pose | yolo11n-pose.pt yolo11s-pose.pt yolo11m-pose.pt yolo11l-pose.pt yolo11x-pose.pt | Pose/Keypoints | ✅ | ✅ | ✅ | ✅ |
| YOLO11-obb | yolo11n-obb.pt yolo11s-obb.pt yolo11m-obb.pt yolo11l-obb.pt yolo11x-obb.pt | Detección Orientada | ✅ | ✅ | ✅ | ✅ |
| YOLO11-cls | yolo11n-cls.pt yolo11s-cls.pt yolo11m-cls.pt yolo11l-cls.pt yolo11x-cls.pt | Clasificación | ✅ | ✅ | ✅ | ✅ |
Esta tabla proporciona una visión general de las variantes del modelo YOLO11, mostrando su aplicabilidad en tareas específicas y su compatibilidad con modos operativos como Inferencia, Validación, Entrenamiento y Exportación. Esta flexibilidad hace que YOLO11 sea adecuado para una amplia gama de aplicaciones en visión artificial, desde la detección en tiempo real hasta tareas complejas de segmentación.
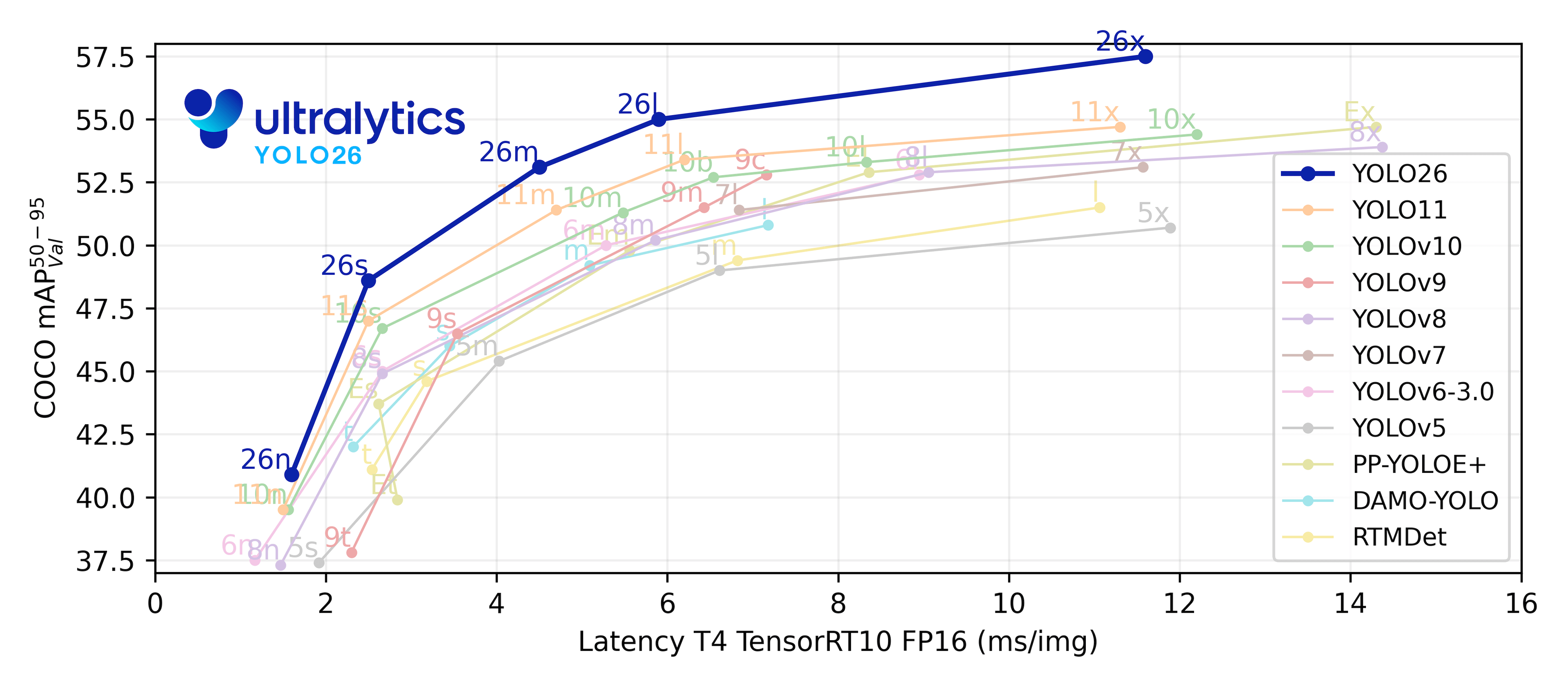
Métricas de rendimiento
Rendimiento
Consulte la Documentación de Detección para ver ejemplos de uso con estos modelos entrenados en COCO, que incluyen 80 clases preentrenadas.
| Modelo | tamaño (píxeles) | mAPval 50-95 | Velocidad CPU ONNX (ms) | Velocidad T4 TensorRT10 (ms) | parámetros (M) | FLOPs (B) |
|---|---|---|---|---|---|---|
| YOLO11n | 640 | 39.5 | 56.1 ± 0.8 | 1.5 ± 0.0 | 2.6 | 6.5 |
| YOLO11s | 640 | 47.0 | 90.0 ± 1.2 | 2.5 ± 0.0 | 9.4 | 21.5 |
| YOLO11m | 640 | 51.5 | 183.2 ± 2.0 | 4.7 ± 0.1 | 20.1 | 68.0 |
| YOLO11l | 640 | 53.4 | 238.6 ± 1.4 | 6.2 ± 0.1 | 25.3 | 86.9 |
| YOLO11x | 640 | 54.7 | 462.8 ± 6.7 | 11.3 ± 0.2 | 56.9 | 194.9 |
Consulte la Documentación de Segmentación para ver ejemplos de uso con estos modelos entrenados en COCO, que incluyen 80 clases preentrenadas.
| Modelo | tamaño (píxeles) | mAPbox 50-95 | mAPmask 50-95 | Velocidad CPU ONNX (ms) | Velocidad T4 TensorRT10 (ms) | parámetros (M) | FLOPs (B) |
|---|---|---|---|---|---|---|---|
| YOLO11n-seg | 640 | 38.9 | 32.0 | 65.9 ± 1.1 | 1.8 ± 0.0 | 2.9 | 9.7 |
| YOLO11s-seg | 640 | 46.6 | 37.8 | 117.6 ± 4.9 | 2.9 ± 0.0 | 10.1 | 33.0 |
| YOLO11m-seg | 640 | 51.5 | 41.5 | 281.6 ± 1.2 | 6.3 ± 0.1 | 22.4 | 113.2 |
| YOLO11l-seg | 640 | 53.4 | 42.9 | 344.2 ± 3.2 | 7.8 ± 0.2 | 27.6 | 132.2 |
| YOLO11x-seg | 640 | 54.7 | 43.8 | 664.5 ± 3.2 | 15.8 ± 0.7 | 62.1 | 296.4 |
Consulte la Documentación de Clasificación para ver ejemplos de uso con estos modelos entrenados en ImageNet, que incluyen 1000 clases preentrenadas.
| Modelo | tamaño (píxeles) | acc top1 | acc top5 | Velocidad CPU ONNX (ms) | Velocidad T4 TensorRT10 (ms) | parámetros (M) | FLOPs (B) a 224 |
|---|---|---|---|---|---|---|---|
| YOLO11n-cls | 224 | 70.0 | 89.4 | 5.0 ± 0.3 | 1.1 ± 0.0 | 2.8 | 0.5 |
| YOLO11s-cls | 224 | 75.4 | 92.7 | 7.9 ± 0.2 | 1.3 ± 0.0 | 6.7 | 1.6 |
| YOLO11m-cls | 224 | 77.3 | 93.9 | 17.2 ± 0.4 | 2.0 ± 0.0 | 11.6 | 4.9 |
| YOLO11l-cls | 224 | 78.3 | 94.3 | 23.2 ± 0.3 | 2.8 ± 0.0 | 14.1 | 6.2 |
| YOLO11x-cls | 224 | 79.5 | 94.9 | 41.4 ± 0.9 | 3.8 ± 0.0 | 29.6 | 13.6 |
Consulte la Documentación de Estimación de Pose para ver ejemplos de uso con estos modelos entrenados en COCO, que incluyen 1 clase preentrenada, 'person'.
| Modelo | tamaño (píxeles) | mAPpose 50-95 | mAPpose 50 | Velocidad CPU ONNX (ms) | Velocidad T4 TensorRT10 (ms) | parámetros (M) | FLOPs (B) |
|---|---|---|---|---|---|---|---|
| YOLO11n-pose | 640 | 50.0 | 81.0 | 52.4 ± 0.5 | 1.7 ± 0.0 | 2.9 | 7.4 |
| YOLO11s-pose | 640 | 58.9 | 86.3 | 90.5 ± 0.6 | 2.6 ± 0.0 | 9.9 | 23.1 |
| YOLO11m-pose | 640 | 64.9 | 89.4 | 187.3 ± 0.8 | 4.9 ± 0.1 | 20.9 | 71.4 |
| YOLO11l-pose | 640 | 66.1 | 89.9 | 247.7 ± 1.1 | 6.4 ± 0.1 | 26.1 | 90.3 |
| YOLO11x-pose | 640 | 69.5 | 91.1 | 488.0 ± 13.9 | 12.1 ± 0.2 | 58.8 | 202.8 |
Consulte la Documentación de Detección Orientada para ver ejemplos de uso con estos modelos entrenados en DOTAv1, que incluyen 15 clases preentrenadas.
| Modelo | tamaño (píxeles) | mAPtest 50 | Velocidad CPU ONNX (ms) | Velocidad T4 TensorRT10 (ms) | parámetros (M) | FLOPs (B) |
|---|---|---|---|---|---|---|
| YOLO11n-obb | 1024 | 78.4 | 117.6 ± 0.8 | 4.4 ± 0.0 | 2.7 | 16.8 |
| YOLO11s-obb | 1024 | 79.5 | 219.4 ± 4.0 | 5.1 ± 0.0 | 9.7 | 57.1 |
| YOLO11m-obb | 1024 | 80.9 | 562.8 ± 2.9 | 10.1 ± 0.4 | 20.9 | 182.8 |
| YOLO11l-obb | 1024 | 81.0 | 712.5 ± 5.0 | 13.5 ± 0.6 | 26.1 | 231.2 |
| YOLO11x-obb | 1024 | 81.3 | 1408.6 ± 7.7 | 28.6 ± 1.0 | 58.8 | 519.1 |
Ejemplos de uso
Esta sección proporciona ejemplos sencillos de entrenamiento e inferencia de YOLO11. Para obtener documentación completa sobre estos y otros modos, consulte las páginas de documentación de Predict, Train, Val y Export.
Tenga en cuenta que el siguiente ejemplo es para los modelos YOLO11 Detect para la detección de objetos. Para tareas adicionales admitidas, consulte los documentos de Segment, Classify, OBB y Pose.
Ejemplo
PyTorch preentrenados *.pt modelos, así como la configuración *.yaml los archivos se pueden pasar a la YOLO() class para crear una instancia de modelo en Python:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLO11n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")
Hay comandos de la CLI disponibles para ejecutar directamente los modelos:
# Load a COCO-pretrained YOLO11n model and train it on the COCO8 example dataset for 100 epochs
yolo train model=yolo11n.pt data=coco8.yaml epochs=100 imgsz=640
# Load a COCO-pretrained YOLO11n model and run inference on the 'bus.jpg' image
yolo predict model=yolo11n.pt source=path/to/bus.jpg
Citas y agradecimientos
Publicación de Ultralytics YOLO11
Ultralytics no ha publicado un artículo de investigación formal para YOLO11 debido a la naturaleza rápidamente cambiante de los modelos. Nos centramos en avanzar en la tecnología y facilitar su uso, en lugar de producir documentación estática. Para obtener la información más actualizada sobre la arquitectura, las características y el uso de YOLO, consulte nuestro repositorio de GitHub y nuestra documentación.
Si utiliza YOLO11 o cualquier otro software de este repositorio en su trabajo, por favor, cítelo utilizando el siguiente formato:
@software{yolo11_ultralytics,
author = {Glenn Jocher and Jing Qiu},
title = {Ultralytics YOLO11},
version = {11.0.0},
year = {2024},
url = {https://github.com/ultralytics/ultralytics},
orcid = {0000-0001-5950-6979, 0000-0003-3783-7069},
license = {AGPL-3.0}
}
Tenga en cuenta que el DOI está pendiente y se añadirá a la cita una vez que esté disponible. Los modelos YOLO11 se proporcionan bajo licencias AGPL-3.0 y Enterprise.
Preguntas frecuentes
¿Cuáles son las mejoras clave en Ultralytics YOLO11 en comparación con YOLOv8?
Ultralytics YOLO11 introduce varios avances significativos con respecto a YOLOv8. Las mejoras clave incluyen:
- Extracción de Características Mejorada: YOLO11 emplea una arquitectura backbone y neck mejorada, optimizando las capacidades de extracción de características para una detección de objetos más precisa.
- Eficiencia y Velocidad Optimizadas: Los diseños arquitectónicos refinados y los pipelines de entrenamiento optimizados ofrecen velocidades de procesamiento más rápidas, manteniendo un equilibrio entre precisión y rendimiento.
- Mayor precisión con menos parámetros: YOLO11m logra una Precisión Media Promedio (mAP) más alta en el conjunto de datos COCO con un 22% menos de parámetros que YOLOv8m, lo que lo hace computacionalmente eficiente sin comprometer la precisión.
- Adaptabilidad en Diversos Entornos: YOLO11 se puede implementar en diversos entornos, incluidos dispositivos edge, plataformas en la nube y sistemas que admiten GPU NVIDIA.
- Amplia Gama de Tareas Compatibles: YOLO11 admite diversas tareas de visión artificial, como la detección de objetos, la segmentación de instancias, la clasificación de imágenes, la estimación de la pose y la detección de objetos orientados (OBB).
¿Cómo entreno un modelo YOLO11 para la detección de objetos?
El entrenamiento de un modelo YOLO11 para la detección de objetos se puede realizar utilizando comandos de Python o CLI. A continuación, se muestran ejemplos de ambos métodos:
Ejemplo
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Load a COCO-pretrained YOLO11n model and train it on the COCO8 example dataset for 100 epochs
yolo train model=yolo11n.pt data=coco8.yaml epochs=100 imgsz=640
Para obtener instrucciones más detalladas, consulte la documentación de Train.
¿Qué tareas pueden realizar los modelos YOLO11?
Los modelos YOLO11 son versátiles y admiten una amplia gama de tareas de visión artificial, incluyendo:
- Detección de Objetos: Identificación y localización de objetos dentro de una imagen.
- Segmentación de Instancias: Detección de objetos y delineación de sus límites.
- Clasificación de Imágenes: Clasificación de imágenes en clases predefinidas.
- Estimación de la Pose: Detección y seguimiento de puntos clave en cuerpos humanos.
- Detección de objetos orientados (OBB): Detección de objetos con rotación para mayor precisión.
Para obtener más información sobre cada tarea, consulte la documentación de Detección, Segmentación de instancias, Clasificación, Estimación de pose y Detección orientada.
¿Cómo logra YOLO11 una mayor precisión con menos parámetros?
YOLO11 logra una mayor precisión con menos parámetros gracias a los avances en el diseño del modelo y las técnicas de optimización. La arquitectura mejorada permite una extracción y un procesamiento de características eficientes, lo que resulta en una mayor precisión media promedio (mAP) en conjuntos de datos como COCO, al tiempo que utiliza un 22% menos de parámetros que YOLOv8m. Esto hace que YOLO11 sea computacionalmente eficiente sin comprometer la precisión, lo que lo hace adecuado para su implementación en dispositivos con recursos limitados.
¿Se puede implementar YOLO11 en dispositivos de borde?
Sí, YOLO11 está diseñado para adaptarse a diversos entornos, incluidos los dispositivos edge. Su arquitectura optimizada y sus capacidades de procesamiento eficiente lo hacen adecuado para su implementación en dispositivos edge, plataformas en la nube y sistemas que admiten GPU NVIDIA. Esta flexibilidad garantiza que YOLO11 pueda utilizarse en diversas aplicaciones, desde la detección en tiempo real en dispositivos móviles hasta tareas complejas de segmentación en entornos de nube. Para obtener más detalles sobre las opciones de implementación, consulte la documentación de Exportación.





