Link to this sectionRecadrage d'objets avec Ultralytics YOLO26#
Link to this sectionQu'est-ce que le recadrage d'objets ?#
Le recadrage d'objets avec Ultralytics YOLO26 consiste à isoler et extraire des objets spécifiques détectés à partir d'une image ou d'une vidéo. Les capacités du modèle YOLO26 sont utilisées pour identifier et délimiter avec précision les objets, permettant un recadrage précis pour une analyse ou une manipulation ultérieure.
Watch: Object Cropping using Ultralytics YOLO
Link to this sectionAvantages du recadrage d'objets#
- Analyse ciblée : YOLO26 facilite le recadrage ciblé d'objets, permettant un examen ou un traitement approfondi d'éléments individuels au sein d'une scène.
- Volume de données réduit : En extrayant uniquement les objets pertinents, le recadrage d'objets aide à minimiser la taille des données, le rendant efficace pour le stockage, la transmission ou les tâches informatiques ultérieures.
- Enhanced Precision: YOLO26's object detection accuracy ensures that the cropped objects maintain their spatial relationships, preserving the integrity of the visual information for detailed analysis.
Link to this sectionVisuels#
| Bagages d'aéroport |
|---|
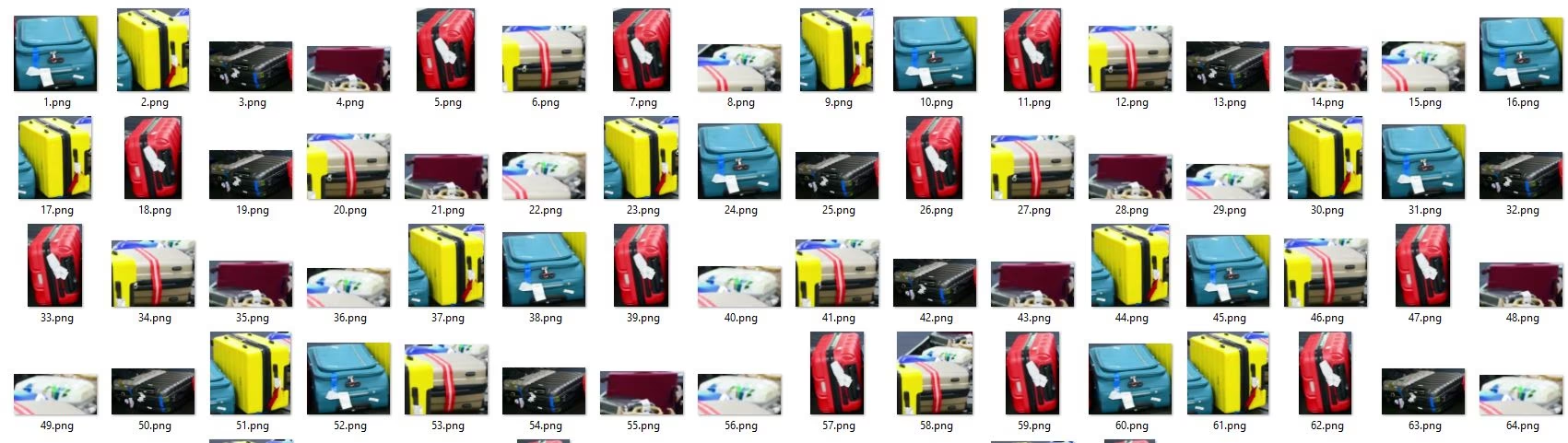 |
| Recadrage de valises sur un tapis roulant d'aéroport avec Ultralytics YOLO26 |
Link to this sectionRecadrer des objets avec YOLO26#
Transmets ta vidéo à la solution ObjectCropper ; elle détecte les objets à chaque image et enregistre chaque détection comme une image séparée. Limite le recadrage à des classes spécifiques, augmente le conf pour ne garder que les détections fiables, et définis crop_dir pour choisir où les recadrages seront enregistrés.
# Crop the objects
yolo solutions crop
# Pass a source video
yolo solutions crop source="path/to/video.mp4"
# Crop specific classes
yolo solutions crop classes="[0, 2]"Link to this sectionArguments de ObjectCropper#
Voici un tableau avec les arguments de ObjectCropper :
| Argument | Type | Défaut | Description |
|---|---|---|---|
model | str | None | Chemin d'accès vers un fichier de modèle YOLO d'Ultralytics. |
crop_dir | str | 'cropped-detections' | Nom du répertoire pour stocker les détections recadrées. |
De plus, les arguments de visualisation suivants sont disponibles pour utilisation :
| Argument | Type | Défaut | Description |
|---|---|---|---|
show | bool | False | Si True, affiche les images ou vidéos annotées dans une fenêtre. Utile pour un retour visuel immédiat lors du développement ou des tests. |
line_width | int or None | None | Spécifie l'épaisseur de ligne des boîtes englobantes. Si None, l'épaisseur de ligne est automatiquement ajustée en fonction de la taille de l'image. Offre une personnalisation visuelle pour plus de clarté. |
Link to this sectionFAQ#
Link to this sectionQu'est-ce que le recadrage d'objets dans Ultralytics YOLO26 et comment cela fonctionne-t-il ?#
Le recadrage d'objets avec Ultralytics YOLO26 consiste à isoler et extraire des objets spécifiques d'une image ou d'une vidéo en fonction des capacités de détection de YOLO26. Ce processus permet une analyse ciblée, une réduction du volume de données et une précision accrue en tirant parti de YOLO26 pour identifier les objets avec une grande exactitude et les recadrer en conséquence. Pour un tutoriel approfondi, consulte l'exemple de recadrage d'objets.
Link to this sectionPourquoi devrais-je utiliser Ultralytics YOLO26 pour le recadrage d'objets plutôt que d'autres solutions ?#
Ultralytics YOLO26 se distingue par sa précision, sa rapidité et sa facilité d'utilisation. Il permet une détection et un recadrage d'objets détaillés et précis, essentiels pour l'analyse ciblée et les applications nécessitant une haute intégrité des données. De plus, YOLO26 s'intègre parfaitement avec des outils comme OpenVINO et TensorRT pour les déploiements nécessitant des capacités en temps réel et une optimisation sur divers matériels. Explore les avantages dans le guide sur l'exportation de modèles.
Link to this sectionComment puis-je réduire le volume de données de mon jeu de données en utilisant le recadrage d'objets ?#
En utilisant Ultralytics YOLO26 pour ne recadrer que les objets pertinents de tes images ou vidéos, tu peux réduire considérablement la taille des données, le rendant plus efficace pour le stockage et le traitement. Ce processus implique d'entraîner le modèle à détecter des objets spécifiques, puis d'utiliser les résultats pour ne recadrer et enregistrer que ces portions. Pour plus d'informations sur l'exploitation des capacités d'Ultralytics YOLO26, visite notre guide de démarrage rapide.
Link to this sectionPuis-je utiliser Ultralytics YOLO26 pour l'analyse vidéo en temps réel et le recadrage d'objets ?#
Oui, Ultralytics YOLO26 peut traiter des flux vidéo en temps réel pour détecter et recadrer des objets dynamiquement. Les capacités d'inférence à grande vitesse du modèle le rendent idéal pour des applications en temps réel telles que la surveillance, l'analyse sportive et les systèmes d'inspection automatisés. Consulte les modes de suivi et de prédiction pour comprendre comment implémenter le traitement en temps réel.
Link to this sectionQuelles sont les exigences matérielles pour exécuter efficacement YOLO26 pour le recadrage d'objets ?#
Ultralytics YOLO26 est optimisé pour les environnements CPU et GPU, mais pour obtenir des performances optimales, notamment pour l'inférence en temps réel ou à haut volume, un GPU dédié (par exemple, NVIDIA Tesla, série RTX) est recommandé. Pour un déploiement sur des appareils légers, envisage CoreML pour iOS ou LiteRT pour Android. Plus de détails sur les appareils et formats pris en charge sont disponibles dans nos options de déploiement de modèles.