Ultralytics YOLO26 su NVIDIA Jetson utilizzando DeepStream SDK e TensorRT
Guarda: Come utilizzare i modelli Ultralytics YOLO26 con NVIDIA Deepstream su Jetson Orin NX 🚀
Questa guida completa fornisce una procedura dettagliata per il deployment di Ultralytics YOLO26 su dispositivi NVIDIA Jetson utilizzando DeepStream SDK e TensorRT. Qui utilizziamo TensorRT per massimizzare le prestazioni di inferenza sulla piattaforma Jetson.
Nota
Questa guida è stata testata con NVIDIA Jetson Orin Nano Super Developer Kit con l'ultima versione stabile di JetPack JP6.1, Seeed Studio reComputer J4012 basato su NVIDIA Jetson Orin NX 16GB con JetPack JP5.1.3 e Seeed Studio reComputer J1020 v2 basato su NVIDIA Jetson Nano 4GB con JetPack JP4.6.4. Si prevede che funzioni su tutta la linea hardware NVIDIA Jetson, comprese le versioni più recenti e precedenti.
Cos'è NVIDIA DeepStream?
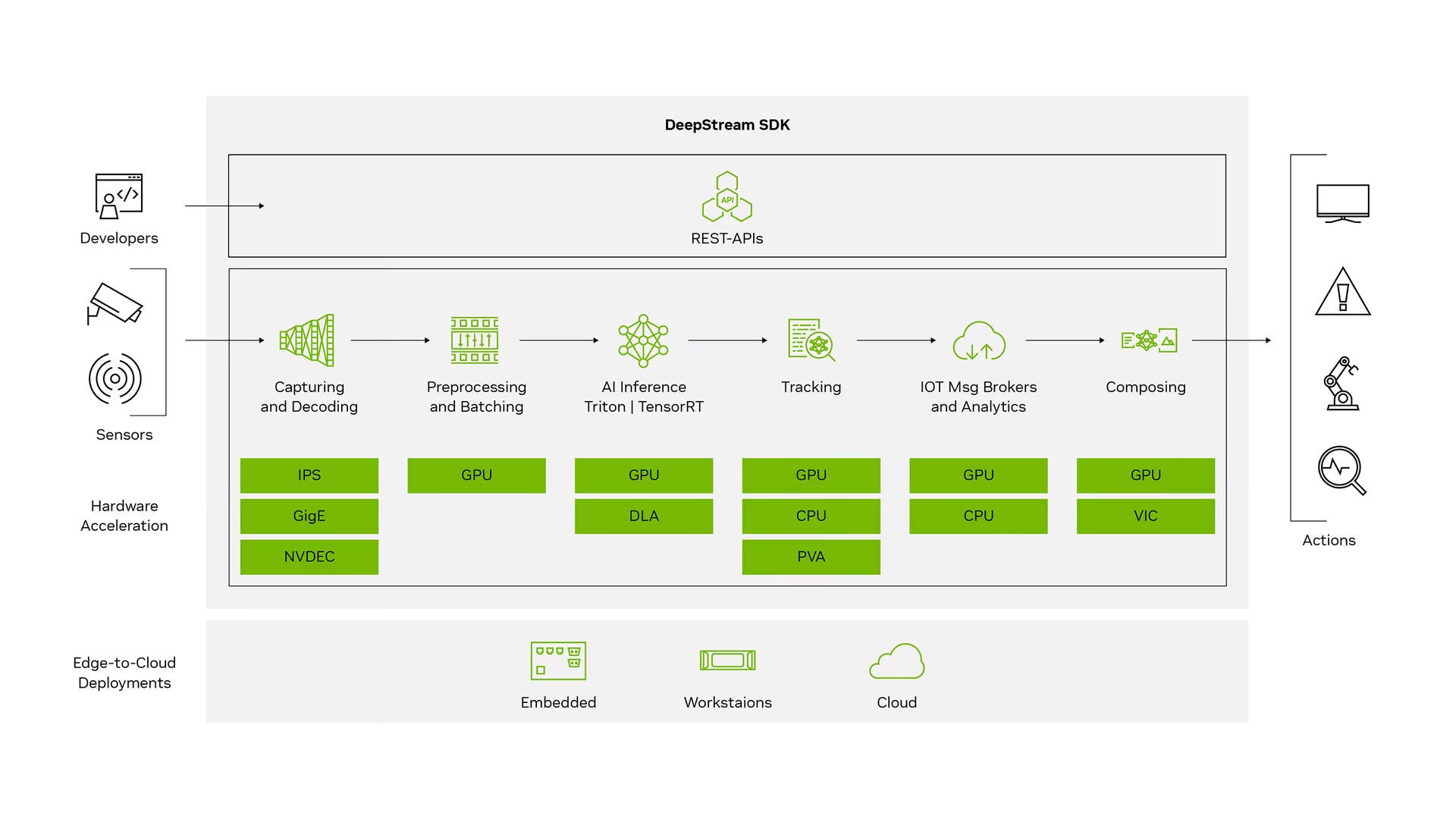
DeepStream SDK di NVIDIA è un toolkit completo di analisi di streaming basato su GStreamer per l'elaborazione multi-sensore basata su IA, video, audio e comprensione delle immagini. È ideale per sviluppatori di vision AI, partner software, startup e OEM che creano app e servizi IVA (Intelligent Video Analytics). Ora puoi creare pipeline di elaborazione di flussi che incorporano reti neurali e altre attività di elaborazione complesse come il tracciamento, la codifica/decodifica video e il rendering video. Queste pipeline consentono l'analisi in tempo reale su dati video, immagini e sensori. Il supporto multi-piattaforma di DeepStream ti offre un modo più rapido e semplice per sviluppare applicazioni e servizi di vision AI on-premise, all'edge e nel cloud.
Prerequisiti
Prima di iniziare a seguire questa guida:
- Visita la nostra documentazione, Guida Rapida: NVIDIA Jetson con Ultralytics YOLO26 per configurare il tuo dispositivo NVIDIA Jetson con Ultralytics YOLO26.
- Installa DeepStream SDK in base alla versione di JetPack
- Per JetPack 4.6.4, installa DeepStream 6.0.1
- Per JetPack 5.1.3, installa DeepStream 6.3
- Per JetPack 6.1, installa DeepStream 7.1
- Per JetPack 7.1, installare DeepStream 9.0
Suggerimento
In questa guida abbiamo utilizzato il metodo del pacchetto Debian per installare DeepStream SDK sul dispositivo Jetson. Puoi anche visitare DeepStream SDK su Jetson (Archiviato) per accedere alle versioni precedenti di DeepStream.
Configurazione DeepStream per YOLO26
Qui stiamo utilizzando il repository GitHub marcoslucianops/DeepStream-Yolo che include il supporto NVIDIA DeepStream SDK per i modelli YOLO. Apprezziamo gli sforzi di marcoslucianops per i suoi contributi!
Installa Ultralytics con le dipendenze necessarie
cd ~ pip install -U pip git clone https://github.com/ultralytics/ultralytics cd ultralytics pip install -e ".[export]" onnxslimClona il repository DeepStream-Yolo
cd ~ git clone https://github.com/marcoslucianops/DeepStream-YoloCopia il
export_yolo26.pyfile daDeepStream-Yolo/utilsdirectory allaultralyticscartellacp ~/DeepStream-Yolo/utils/export_yolo26.py ~/ultralytics cd ultralyticsScarica il modello di detect Ultralytics YOLO26 (.pt) di tua scelta dalle release di YOLO26. Qui utilizziamo yolo26s.pt.
wget https://github.com/ultralytics/assets/releases/download/v8.4.0/yolo26s.ptNota
Puoi anche utilizzare un modello YOLO26 addestrato su misura.
Converti il modello in ONNX
python3 export_yolo26.py -w yolo26s.ptPassa gli argomenti seguenti al comando sopra
Per DeepStream 5.1, rimuovi il
--dynamicargomento e utilizzoopset12 o inferiore. Il valore predefinitoopsetè 17.--opset 12Per modificare la dimensione di inferenza (predefinita: 640)
-s SIZE --size SIZE -s HEIGHT WIDTH --size HEIGHT WIDTHEsempio per 1280:
-s 1280 or -s 1280 1280Per semplificare il modello ONNX (DeepStream >= 6.0)
--simplifyPer utilizzare il batch-size dinamico (DeepStream >= 6.1)
--dynamicPer utilizzare il batch-size statico (esempio per batch-size = 4)
--batch 4Copia il codice generato
.onnxfile del modello elabels.txtfile alDeepStream-Yolocartellacp yolo26s.pt.onnx labels.txt ~/DeepStream-Yolo cd ~/DeepStream-YoloImposta la versione di CUDA in base alla versione di JetPack installata
Per JetPack 4.6.4:
export CUDA_VER=10.2Per JetPack 5.1.3:
export CUDA_VER=11.4Per JetPack 6.1:
export CUDA_VER=12.6Compila la libreria
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_YoloModifica il
config_infer_primary_yolo26.txtfile in base al tuo modello (per YOLO26s con 80 classi)[property] ... onnx-file=yolo26s.pt.onnx ... num-detected-classes=80 ...Modifica il
deepstream_app_configfile... [primary-gie] ... config-file=config_infer_primary_yolo26.txtPuoi anche modificare la sorgente video in
deepstream_app_configfile. Qui, viene caricato un file video predefinito... [source0] ... uri=file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
Esegui inferenza
deepstream-app -c deepstream_app_config.txt
Nota
La generazione del file del motore TensorRT richiederà molto tempo prima di avviare l'inferenza. Si prega quindi di pazientare.

Suggerimento
Se desideri convertire il modello in precisione FP16, imposta semplicemente model-engine-file=model_b1_gpu0_fp16.engine e network-mode=2 all'interno config_infer_primary_yolo26.txt
Calibrazione INT8
Se desideri utilizzare la precisione INT8 per l'inferenza, devi seguire i passaggi seguenti:
Nota
Attualmente INT8 non funziona con TensorRT 10.x. Questa sezione della guida è stata testata con TensorRT 8.x, che dovrebbe funzionare.
Imposta
OPENCVvariabile d'ambienteexport OPENCV=1Compila la libreria
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_YoloPer il dataset COCO, scarica il val2017, estrarre e spostare in
DeepStream-YolocartellaCrea una nuova directory per le immagini di calibrazione
mkdir calibrationEsegui quanto segue per selezionare 1000 immagini casuali dal dataset COCO per eseguire la calibrazione
for jpg in $(ls -1 val2017/*.jpg | sort -R | head -1000); do cp ${jpg} calibration/ doneNota
NVIDIA raccomanda almeno 500 immagini per ottenere una buona precisione. In questo esempio, vengono scelte 1000 immagini per ottenere una precisione migliore (più immagini = più precisione). Puoi impostarlo da head -1000. Ad esempio, per 2000 immagini, head -2000. Questo processo può richiedere molto tempo.
Crea il
calibration.txtfile con tutte le immagini selezionaterealpath calibration/*jpg > calibration.txtImposta le variabili d'ambiente
export INT8_CALIB_IMG_PATH=calibration.txt export INT8_CALIB_BATCH_SIZE=1Nota
Valori più alti di INT8_CALIB_BATCH_SIZE comporteranno maggiore accuratezza e maggiore velocità di calibrazione. Impostalo in base alla memoria della tua GPU.
Aggiorna il
config_infer_primary_yolo26.txtfileDa
... model-engine-file=model_b1_gpu0_fp32.engine #int8-calib-file=calib.table ... network-mode=0 ...Per
... model-engine-file=model_b1_gpu0_int8.engine int8-calib-file=calib.table ... network-mode=1 ...
Esegui inferenza
deepstream-app -c deepstream_app_config.txt
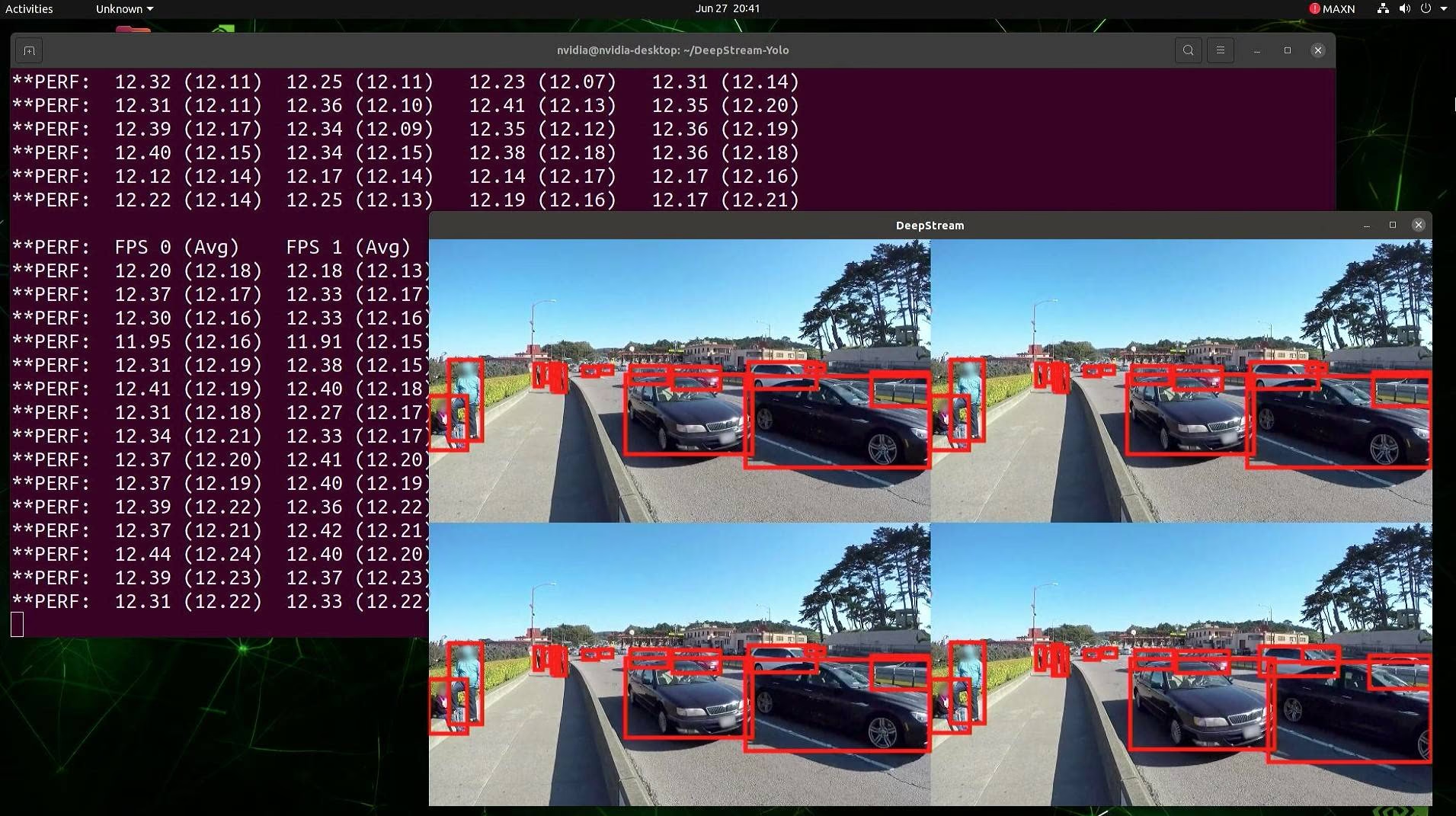
Configurazione MultiStream
Guarda: Come eseguire l'inferenza multistream con Ultralytics utilizzando NVIDIA su Jetson Orin 🚀
Per impostare più flussi in un'unica applicazione DeepStream, apporta le seguenti modifiche al deepstream_app_config.txt file:
Modifica le righe e le colonne per creare una visualizzazione a griglia in base al numero di stream che desideri avere. Ad esempio, per 4 stream, possiamo aggiungere 2 righe e 2 colonne.
[tiled-display] rows=2 columns=2Imposta
num-sources=4e aggiungi ilurivoci per tutti e quattro i flussi.[source0] enable=1 type=3 uri=path/to/video1.jpg uri=path/to/video2.jpg uri=path/to/video3.jpg uri=path/to/video4.jpg num-sources=4
Esegui inferenza
deepstream-app -c deepstream_app_config.txt
Risultati del Benchmark
I seguenti benchmark riassumono le prestazioni dei modelli YOLO26 a diversi livelli di precisione di TensorRT con una dimensione di input di 640x640 su NVIDIA Jetson Orin NX 16GB.
Tabella comparativa
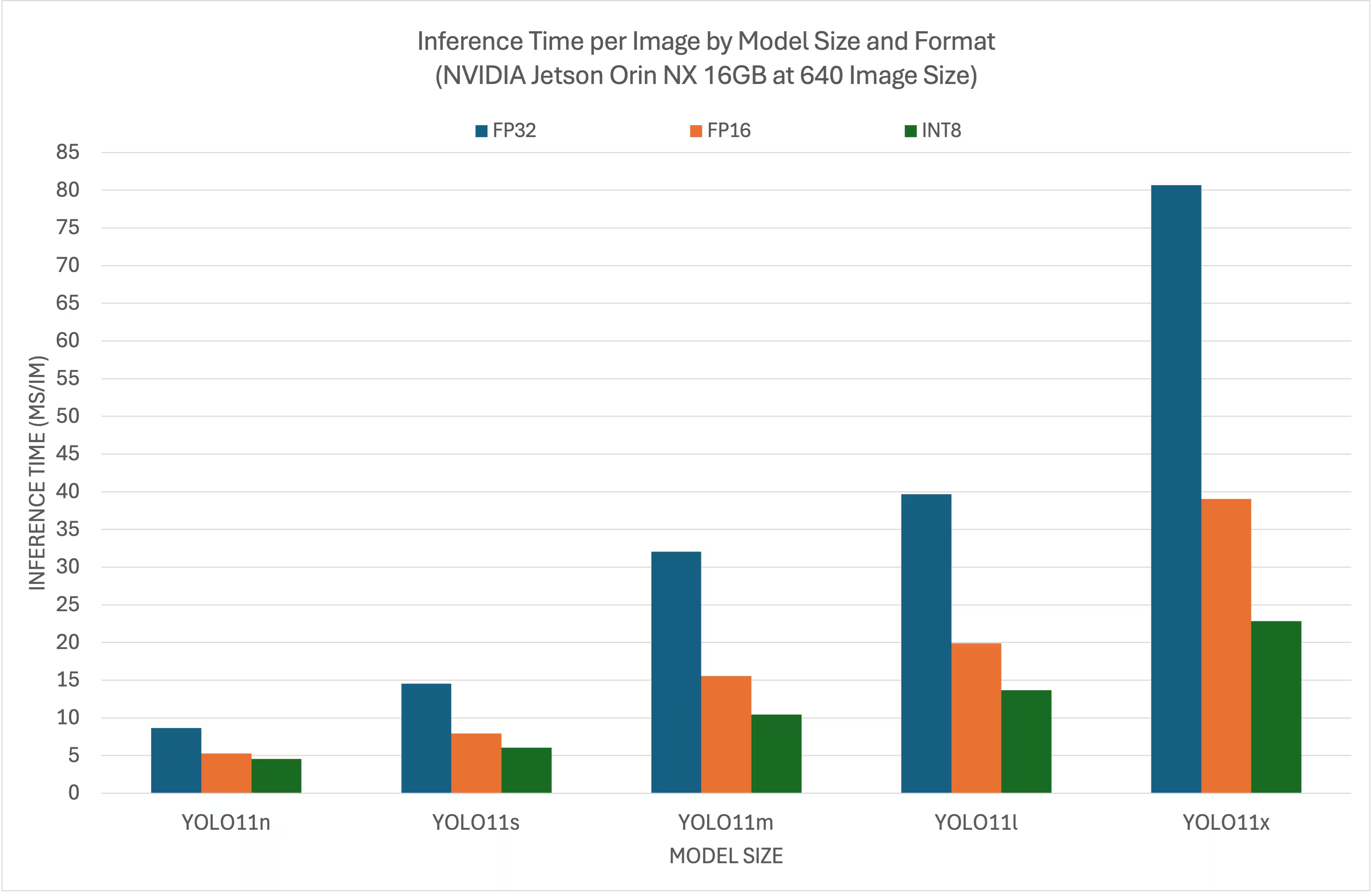
Tabella comparativa dettagliata
Prestazioni
| Formato | Stato | Tempo di inferenza (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 8.64 |
| TensorRT (FP16) | ✅ | 5.27 |
| TensorRT (INT8) | ✅ | 4.54 |
| Formato | Stato | Tempo di inferenza (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 14.53 |
| TensorRT (FP16) | ✅ | 7.91 |
| TensorRT (INT8) | ✅ | 6.05 |
| Formato | Stato | Tempo di inferenza (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 32.05 |
| TensorRT (FP16) | ✅ | 15.55 |
| TensorRT (INT8) | ✅ | 10.43 |
| Formato | Stato | Tempo di inferenza (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 39.68 |
| TensorRT (FP16) | ✅ | 19.88 |
| TensorRT (INT8) | ✅ | 13.64 |
| Formato | Stato | Tempo di inferenza (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 80.65 |
| TensorRT (FP16) | ✅ | 39.06 |
| TensorRT (INT8) | ✅ | 22.83 |
Ringraziamenti
Questa guida è stata inizialmente creata dai nostri amici di Seeed Studio, Lakshantha ed Elaine.
FAQ
Come si configura Ultralytics YOLO26 su un dispositivo NVIDIA Jetson?
Per configurare Ultralytics YOLO26 su un dispositivo NVIDIA Jetson, è necessario prima installare il DeepStream SDK compatibile con la tua versione di JetPack. Segui la guida passo-passo nella nostra Guida Rapida per configurare il tuo NVIDIA Jetson per il deployment di YOLO26.
Qual è il vantaggio di utilizzare TensorRT con YOLO26 su NVIDIA Jetson?
L'utilizzo di TensorRT con YOLO26 ottimizza il modello per l'inferenza, riducendo significativamente la latenza e migliorando il throughput sui dispositivi NVIDIA Jetson. TensorRT fornisce inferenza di deep learning ad alte prestazioni e bassa latenza attraverso la fusione di layer, la calibrazione della precisione e l'auto-tuning del kernel. Ciò porta a un'esecuzione più rapida ed efficiente, particolarmente utile per applicazioni in tempo reale come l'analisi video e le macchine autonome.
Posso eseguire Ultralytics YOLO26 con DeepStream SDK su diversi hardware NVIDIA Jetson?
Sì, la guida per il deployment di Ultralytics YOLO26 con DeepStream SDK e TensorRT è compatibile con l'intera gamma di NVIDIA Jetson. Ciò include dispositivi come Jetson Orin NX 16GB con JetPack 5.1.3 e Jetson Nano 4GB con JetPack 4.6.4. Fare riferimento alla sezione Configurazione DeepStream per YOLO26 per i passaggi dettagliati.
Come posso convertire un modello YOLO26 in ONNX per DeepStream?
Per convertire un modello YOLO26 in formato ONNX per il deployment con DeepStream, utilizzare il utils/export_yolo26.py script dal DeepStream-Yolo repository.
Ecco un comando di esempio:
python3 utils/export_yolo26.py -w yolo26s.pt --opset 12 --simplify
Per maggiori dettagli sulla conversione del modello, consulta la nostra sezione sull'esportazione del modello.
Quali sono i benchmark di performance per YOLO su NVIDIA Jetson Orin NX?
Le prestazioni dei modelli YOLO26 su NVIDIA Jetson Orin NX 16GB variano in base ai livelli di precisione di TensorRT. Ad esempio, i modelli YOLO26s raggiungono:
- Precisione FP32: 14.6 ms/im, 68.5 FPS
- Precisione FP16: 7.94 ms/im, 126 FPS
- Precisione INT8: 5,95 ms/im, 168 FPS
Questi benchmark sottolineano l'efficienza e la capacità di utilizzare modelli YOLO26 ottimizzati con TensorRT sull'hardware NVIDIA Jetson. Per maggiori dettagli, consultare la nostra sezione Risultati dei Benchmark.








