Link to this sectionUltralytics 솔루션: YOLO26을 활용한 실세계 문제 해결#
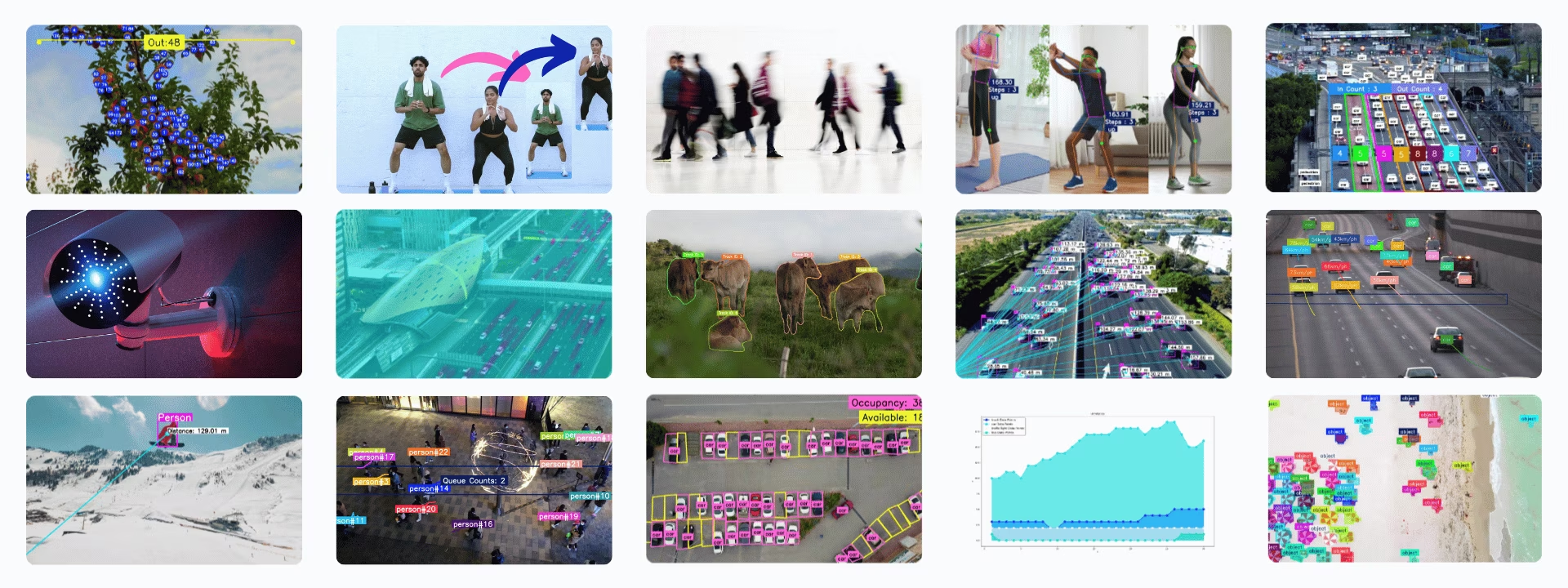
Ultralytics 솔루션은 YOLO 모델의 최첨단 애플리케이션을 제공하며, 객체 카운팅, 블러링, 보안 시스템과 같은 실용적인 해결책을 통해 다양한 산업 분야에서 효율성과 정확도를 높여줍니다. 실무적이고 영향력 있는 구현을 위한 YOLO26의 강력한 기능을 확인해 보십시오.
Watch: How to Run Ultralytics Solutions from the Command Line (CLI) | Ultralytics YOLO26 🚀
Link to this section솔루션#
멋진 컴퓨터 비전 프로젝트를 만드는 데 사용할 수 있는 엄선된 Ultralytics 솔루션 목록입니다.
- 데이터 분석: YOLO26을 활용하여 기술적, 예측적, 처방적 분석을 수행하고 포괄적인 데이터 분석을 통해 패턴을 발견하며 정보에 입각한 의사결정을 내립니다.
- 거리 계산: YOLO26의 바운딩 박스 중심점을 사용하여 객체 간 거리를 계산하며, 이는 공간 분석에 필수적입니다.
- 히트맵: 탐지 히트맵을 활용하여 행렬 전반의 데이터 강도를 시각화함으로써 컴퓨터 비전 작업에서 명확한 통찰력을 제공합니다.
- 객체 추적을 포함한 인스턴스 세그멘테이션: YOLO26으로 인스턴스 세그멘테이션과 객체 추적을 구현하여 정확한 객체 경계를 추출하고 지속적인 모니터링을 수행합니다.
- Streamlit을 사용한 실시간 추론: 사용자 친화적인 Streamlit 인터페이스를 통해 웹 브라우저에서 직접 YOLO26의 강력한 실시간 객체 탐지 기능을 활용하십시오.
- 객체 블러링: 이미지 및 비디오 처리 시 개인정보 보호를 위해 YOLO26을 사용하여 객체 블러링을 적용합니다.
- 객체 카운팅: YOLO26을 사용하여 실시간 객체 카운팅을 수행하는 방법을 익히십시오. 라이브 비디오 스트림에서 객체를 정확하게 세는 기술을 습득할 수 있습니다.
- 영역 내 객체 카운팅: YOLO26을 사용하여 특정 영역 내의 객체를 카운트하고 다양한 구역에서 정확한 탐지를 수행합니다.
- 객체 크롭: 이미지와 비디오에서 객체를 정밀하게 추출하기 위해 YOLO26을 사용한 객체 크롭 기능을 숙달하십시오.
- 주차 관리: YOLO26으로 주차 구역 내 차량 흐름을 구성 및 유도하여 공간 활용도와 사용자 경험을 최적화합니다.
- 대기열 관리: YOLO26을 사용하여 대기 시간을 최소화하고 생산성을 향상하는 효율적인 대기열 관리 시스템을 구현하십시오.
- 보안 경보 시스템: 새로운 객체를 탐지하면 알람을 트리거하는 보안 경보 시스템을 YOLO26으로 구축하십시오. 특정 요구사항에 맞춰 시스템을 커스터마이징할 수 있습니다.
- Similarity Search: OpenAI CLIP 임베딩과 코사인 유사도 검색을 결합하여 지능형 이미지 검색을 활성화하며, "가방을 들고 있는 사람" 또는 "움직이는 차량"과 같은 자연어 쿼리를 사용할 수 있습니다.
- 속도 측정: YOLO26과 객체 추적 기술을 사용하여 자율 주행 차량 및 교통 모니터링과 같은 애플리케이션에 필수적인 객체 속도를 추정합니다.
- 영역 내 객체 추적: YOLO26을 사용하여 비디오 프레임의 특정 영역 내에서 객체를 추적하고 정밀하고 효율적인 모니터링을 수행하는 방법을 배우십시오.
- VisionEye 객체 매핑: 인간의 눈이 특정 객체에 초점을 맞추는 방식을 모방한 시스템을 개발하여 컴퓨터의 세부 정보 식별 및 우선순위 지정 능력을 향상시킵니다.
- 운동 모니터링: YOLO26을 사용하여 운동을 모니터링하는 방법을 알아보십시오. 다양한 피트니스 루틴을 실시간으로 추적하고 분석하는 법을 배우십시오.
Link to this section솔루션 인수#
| 인수 | 유형 | 기본값 | 설명 |
|---|---|---|---|
model | str | None | Ultralytics YOLO 모델 파일 경로입니다. |
region | list 또는 dict | None | 관심 영역을 정의하는 점으로, (x, y) 튜플 리스트이거나 다중 영역(RegionCounter 전용)에 대해 영역 이름과 점 리스트를 매핑하는 딕셔너리입니다. None일 경우, 영역이 필요한 솔루션은 미리 정의된 기본값으로 대체됩니다. |
show_in | bool | True | 비디오 스트림에 유입(in) 카운트를 표시할지 여부를 제어하는 플래그입니다. |
show_out | bool | True | 비디오 스트림에 유출(out) 카운트를 표시할지 여부를 제어하는 플래그입니다. |
analytics_type | str | 'line' | 그래프 유형으로, line(선형), bar(막대), area(영역), 또는 pie(원형)를 지원합니다. |
colormap | int | cv2.COLORMAP_DEEPGREEN | 히트맵에 사용할 컬러맵입니다. |
json_file | str | None | 모든 주차 좌표 데이터가 포함된 JSON 파일 경로입니다. |
up_angle | float | 145.0 | 'up'(위) 자세에 대한 각도 임계값입니다. |
kpts | list[int] | '[6, 8, 10]' | 운동 모니터링에 사용되는 세 개의 키포인트 인덱스 목록입니다. 이 키포인트들은 푸시업, 풀업, 스쿼트, 복근 운동과 같은 동작을 위해 어깨, 팔꿈치, 손목 등 신체 관절이나 부위에 대응합니다. |
down_angle | int | 90 | 'down'(아래) 자세에 대한 각도 임계값입니다. |
blur_ratio | float | 0.5 | 블러 강도의 백분율을 조정하며, 0.1 - 1.0 범위 내의 값을 가집니다. |
crop_dir | str | 'cropped-detections' | 크롭된 탐지 결과를 저장하기 위한 디렉토리 이름입니다. |
records | int | 5 | 보안 경보 시스템에서 이메일을 발송하기 위해 필요한 총 탐지 횟수입니다. |
vision_point | tuple[int, int] | (20, 20) | VisionEye 솔루션을 사용하여 시야가 객체를 추적하고 경로를 그릴 기준점입니다. |
source | str | None | 입력 소스(비디오, RTSP 등) 경로입니다. 솔루션 명령줄 인터페이스(CLI)에서만 사용 가능합니다. |
figsize | tuple[float, float] | (12.8, 7.2) | 히트맵이나 그래프와 같은 분석 차트의 피규어 크기입니다. |
fps | float | 30.0 | 속도 계산에 사용되는 초당 프레임 수입니다. |
max_hist | int | 5 | 속도/방향 계산을 위해 객체별로 추적할 최대 기록 포인트 수입니다. |
meter_per_pixel | float | 0.05 | 픽셀 거리를 실제 단위로 변환하는 데 사용되는 스케일링 계수입니다. |
max_speed | int | 120 | 시각적 오버레이에서 표시되는 최대 속도 제한(경고 등에 사용됨)입니다. |
data | str | 'images' | 유사도 검색에 사용되는 이미지 디렉토리 경로입니다. |
imgsz | int | 640 | 모델 추론을 위한 입력 이미지 크기입니다. |
Solutions also support some of the arguments from track, including parameters such as conf, line_width, tracker, model, show, verbose and classes.
| 인수 | 유형 | 기본값 | 설명 |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | 사용할 추적 알고리즘을 지정합니다. 기본 옵션은 다음과 같습니다: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | 탐지에 대한 신뢰도 임계값을 설정합니다. 값이 낮을수록 더 많은 객체가 추적되지만 잘못된 긍정 탐지(false positives)가 포함될 수 있습니다. |
iou | float | 0.7 | 겹치는 탐지를 필터링하기 위한 Intersection over Union (IoU) 임계값을 설정합니다. |
classes | list | None | 클래스 인덱스로 결과를 필터링합니다. 예를 들어, classes=[0, 2, 3]은 지정된 클래스만 추적합니다. |
verbose | bool | True | 추적 결과 표시를 제어하여 추적된 객체의 시각적 출력을 제공합니다. |
device | str | None | 추론을 위한 장치(예: cpu, cuda:0 또는 0)를 지정합니다. 사용자가 모델 실행을 위해 CPU, 특정 GPU 또는 기타 컴퓨팅 장치를 선택할 수 있도록 합니다. |
show_conf, show_labels 및 기타 언급된 인수를 사용하여 시각화를 커스터마이징할 수 있습니다.
| 인수 | 유형 | 기본값 | 설명 |
|---|---|---|---|
show | bool | False | True일 경우, 주석이 달린 이미지나 비디오를 창에 표시합니다. 개발 또는 테스트 중 즉각적인 시각적 피드백을 확인하는 데 유용합니다. |
line_width | int or None | None | 바운딩 박스의 선 굵기를 지정합니다. None일 경우, 선 굵기가 이미지 크기에 따라 자동으로 조정됩니다. 명확성을 위해 시각적 커스터마이징을 제공합니다. |
show_conf | bool | True | 각 탐지에 대한 신뢰도 점수를 레이블과 함께 표시합니다. 각 탐지에 대한 모델의 확신도를 파악할 수 있습니다. |
show_labels | bool | True | 시각적 출력에서 각 탐지에 대한 레이블을 표시합니다. 탐지된 객체를 즉시 이해할 수 있도록 합니다. |
Link to this sectionSolutionAnnotator 사용법#
All Ultralytics Solutions use the separate class SolutionAnnotator, that extends the main Annotator class, and have the following methods:
| 메서드 | 반환 타입 | 설명 |
|---|---|---|
draw_region() | None | 지정된 포인트, 색상 및 두께를 사용하여 영역을 그립니다. |
queue_counts_display() | None | 지정된 영역의 대기열 수를 표시합니다. |
display_analytics() | None | 주차장 관리를 위한 전반적인 통계를 표시합니다. |
estimate_pose_angle() | float | 객체 포즈 내의 세 점 사이의 각도를 계산합니다. |
draw_specific_kpts() | np.ndarray | 이미지에 특정 키포인트를 그립니다. |
plot_workout_information() | int | 이미지에 레이블이 지정된 텍스트 상자를 그립니다. |
plot_angle_and_count_and_stage() | None | 운동 모니터링을 위해 각도, 반복 횟수 및 단계를 시각화합니다. |
plot_distance_and_line() | None | 중심점 간의 거리를 표시하고 선으로 연결합니다. |
display_objects_labels() | None | 객체 클래스 레이블로 BBox에 주석을 답니다. |
sweep_annotator() | None | 수직 스윕 라인과 선택적 레이블을 시각화합니다. |
visioneye() | None | 객체 중심점을 시각적 '눈(eye)' 포인트에 매핑하고 연결합니다. |
adaptive_label() | None | BBox 중앙에 원형 또는 직사각형 배경 레이블을 그립니다. |
Link to this sectionSolutionResults 작업#
Similarity Search를 제외하고, 각 솔루션 호출은 SolutionResults 객체를 반환합니다.
- 객체 계수의 경우, 결과에는
in_count,out_count및classwise_count가 포함됩니다.
import cv2
from ultralytics import solutions
im0 = cv2.imread("path/to/img")
region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)]
counter = solutions.ObjectCounter(
show=True, # display the output
region=region_points, # pass region points
model="yolo26n.pt", # model="yolo26n-obb.pt" for object counting with OBB model.
# classes=[0, 2], # count specific classes i.e. person and car with COCO pretrained model.
# tracker="botsort.yaml" # Choose trackers i.e "bytetrack.yaml"
)
results = counter(im0)
print(results.in_count) # display in_counts
print(results.out_count) # display out_counts
print(results.classwise_count) # display classwise_countSolutionResults 객체는 다음과 같은 속성을 가집니다:
| 속성 | 유형 | 설명 |
|---|---|---|
plot_im | np.ndarray | 개수, 블러 효과 또는 솔루션별 개선 사항과 같은 시각적 오버레이가 포함된 이미지입니다. |
in_count | int | 비디오 스트림에서 정의된 영역으로 들어오는 것으로 탐지된 객체의 총 수입니다. |
out_count | int | 비디오 스트림에서 정의된 영역을 나가는 것으로 탐지된 객체의 총 수입니다. |
classwise_count | Dict[str, int] | 고급 분석을 위해 클래스별 입/출력 객체 수를 기록하는 딕셔너리입니다. |
queue_count | int | 현재 정의된 대기열 또는 대기 영역 내에 있는 객체 수입니다(대기열 관리에 적합). |
workout_count | list[int] | AI Gym의 트랙별 운동 반복 횟수 (현재 추적 중인 개체당 하나의 항목). |
workout_angle | list[float] | AI Gym의 트랙별 운동 각도 (현재 추적 중인 개체당 하나의 항목). |
workout_stage | list[str] | AI Gym의 트랙별 현재 운동 단계 (현재 추적 중인 개체당 하나의 항목). |
pixels_distance | float | 두 객체 또는 지점(예: BBox) 간의 픽셀 기반 거리입니다. (거리 계산에 적합). |
available_slots | int | 모니터링 영역에서 비어 있는 슬롯의 수입니다(주차 관리에 적합). |
filled_slots | int | 모니터링 영역에서 점유된 슬롯의 수입니다. (주차 관리에 적합) |
email_sent | bool | 알림 또는 경고 이메일이 성공적으로 전송되었는지 여부를 나타냅니다(보안 경보에 적합). |
total_tracks | int | 비디오 분석 중 관찰된 고유한 객체 트랙의 총 수입니다. |
region_counts | Dict[str, int] | 사용자가 정의한 영역 또는 구역 내의 객체 수입니다. |
speed_dict | Dict[str, float] | 속도 분석에 유용한, 트랙별로 계산된 객체 속도 딕셔너리입니다. |
total_crop_objects | int | ObjectCropper 솔루션에 의해 생성된 잘린 객체 이미지의 총 수입니다. |
speed | Dict[str, float] | 추적 및 솔루션 처리에 대한 성능 지표가 포함된 딕셔너리입니다. |
자세한 내용은 SolutionResults 클래스 문서를 참조하십시오.
Link to this sectionCLI를 통한 솔루션 사용#
대부분의 솔루션은 다음을 포함하여 명령줄 인터페이스(CLI)를 통해 직접 사용할 수 있습니다:
Count, Crop, Blur, Workout, Heatmap, Isegment, Visioneye, Speed, Queue, Analytics, Inference, Trackzone
구문
yolo SOLUTIONS SOLUTION_NAME ARGS
- SOLUTIONS는 필수 키워드입니다.
- SOLUTION_NAME은
['count', 'crop', 'blur', 'workout', 'heatmap', 'isegment', 'queue', 'speed', 'analytics', 'trackzone', 'inference', 'visioneye', 'region', 'security', 'parking']중 하나입니다. - ARGS (optional) are custom
arg=valuepairs, such asshow_in=True, to override default settings.
yolo solutions count show=True # for object counting
yolo solutions count source="path/to/video.mp4" # specify video file pathLink to this section솔루션 기여하기#
커뮤니티의 기여를 환영합니다! 아직 솔루션에서 다루지 않은 Ultralytics YOLO의 특정 측면을 마스터했다면, 전문 지식을 공유해 주시기 바랍니다. 가이드를 작성하는 것은 커뮤니티에 환원하고 문서를 더욱 포괄적이고 사용자 친화적으로 만드는 좋은 방법입니다.
시작하려면, 풀 리퀘스트(PR)를 여는 방법에 대한 지침이 포함된 기여 가이드를 읽어보십시오 🛠️. 여러분의 기여를 기대합니다!
함께 협력하여 Ultralytics YOLO 생태계를 더욱 강력하고 다재다능하게 만들어 봅시다 🙏!
Link to this sectionFAQ#
Link to this section실시간 객체 계수를 위해 Ultralytics YOLO를 어떻게 사용합니까?#
Ultralytics YOLO26은 고급 객체 탐지 기능을 활용하여 실시간 객체 계수에 사용할 수 있습니다. 객체 계수에 대한 상세 가이드를 따라 라이브 비디오 스트림 분석을 위해 YOLO26을 설정할 수 있습니다. 단순히 YOLO26을 설치하고, 모델을 로드한 다음, 비디오 프레임을 처리하여 동적으로 객체를 계수하십시오.
Link to this section보안 시스템에 Ultralytics YOLO를 사용할 때의 이점은 무엇입니까?#
Ultralytics YOLO26은 실시간 객체 탐지 및 경고 메커니즘을 제공하여 보안 시스템을 강화합니다. YOLO26을 사용하면 감시 영역에서 새로운 객체가 탐지될 때 경고를 트리거하는 보안 경보 시스템을 만들 수 있습니다. YOLO26을 사용한 강력한 보안 모니터링을 위해 보안 경보 시스템 설정 방법을 알아보십시오.
Link to this sectionUltralytics YOLO가 대기열 관리 시스템을 어떻게 개선할 수 있습니까?#
Ultralytics YOLO26은 대기열에 있는 사람들을 정확하게 계수하고 추적하여 대기 시간을 줄이고 서비스 효율성을 최적화함으로써 대기열 관리 시스템을 크게 개선할 수 있습니다. 효과적인 대기열 모니터링 및 분석을 위해 YOLO26을 구현하는 방법을 배우려면 대기열 관리에 대한 상세 가이드를 따르십시오.
Link to this sectionUltralytics YOLO를 운동 모니터링에 사용할 수 있습니까?#
네, Ultralytics YOLO26은 피트니스 루틴을 실시간으로 추적하고 분석하여 운동 모니터링에 효과적으로 사용할 수 있습니다. 이를 통해 운동 폼과 성과를 정확하게 평가할 수 있습니다. YOLO26을 사용하여 AI 기반 운동 모니터링 시스템을 설정하는 방법을 배우려면 운동 모니터링 가이드를 살펴보십시오.
Link to this section데이터 시각화를 위한 히트맵 생성에 Ultralytics YOLO가 어떻게 도움이 됩니까?#
Ultralytics YOLO26은 히트맵을 생성하여 주어진 영역 전체의 데이터 밀도를 시각화하고 활동이나 관심도가 높은 영역을 강조할 수 있습니다. 이 기능은 다양한 컴퓨터 비전 작업에서 패턴과 추세를 이해하는 데 특히 유용합니다. 포괄적인 데이터 분석 및 시각화를 위해 YOLO26과 히트맵을 생성하고 사용하는 방법에 대해 자세히 알아보십시오.