Visualização Avançada de Dados: Mapas de Calor com Ultralytics YOLO26 🚀
Introdução aos Mapas de Calor
![]()
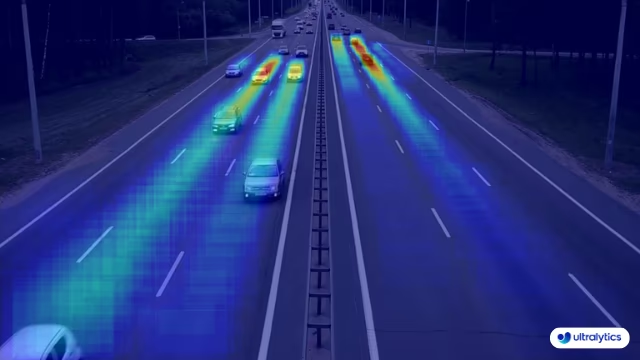
Um mapa de calor gerado com Ultralytics YOLO26 transforma dados complexos em uma matriz vibrante e codificada por cores. Esta ferramenta visual emprega um espectro de cores para representar valores de dados variáveis, onde tons mais quentes indicam intensidades mais altas e tons mais frios significam valores mais baixos. Mapas de calor se destacam na visualização de padrões de dados complexos, correlações e anomalias, oferecendo uma abordagem acessível e envolvente para a interpretação de dados em diversos domínios.
Assista: Mapas de Calor com Ultralytics YOLO26
Por que escolher mapas de calor para análise de dados?
- Visualização Intuitiva da Distribuição de Dados: Mapas de calor simplificam a compreensão da concentração e distribuição de dados, convertendo conjuntos de dados complexos em formatos visuais fáceis de entender.
- Detecção de Padrões Eficiente: Ao visualizar os dados em formato de mapa de calor, torna-se mais fácil identificar tendências, clusters e outliers, facilitando análises e insights mais rápidos.
- Análise Espacial e Tomada de Decisão Aprimoradas: Os mapas de calor são fundamentais para ilustrar relações espaciais, auxiliando nos processos de tomada de decisão em setores como inteligência de negócios, estudos ambientais e planejamento urbano.
Aplicações no Mundo Real
| Transporte | Varejo |
|---|---|
 |  |
| Mapa de Calor de Transporte Ultralytics YOLO26 | Mapa de Calor de Varejo Ultralytics YOLO26 |
Mapas de calor usando Ultralytics YOLO
# Run a heatmap example
yolo solutions heatmap show=True
# Pass a source video
yolo solutions heatmap source="path/to/video.mp4"
# Pass a custom colormap
yolo solutions heatmap colormap=cv2.COLORMAP_INFERNO
# Heatmaps + object counting
yolo solutions heatmap region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("heatmap_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# For object counting with heatmap, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # rectangle region
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # polygon points
# Initialize heatmap object
heatmap = solutions.Heatmap(
show=True, # display the output
model="yolo26n.pt", # path to the YOLO26 model file
colormap=cv2.COLORMAP_PARULA, # colormap of heatmap
# region=region_points, # object counting with heatmaps, you can pass region_points
# classes=[0, 2], # generate heatmap for specific classes, e.g., person and car.
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = heatmap(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
Heatmap() Argumentos
Aqui está uma tabela com o Heatmap argumentos:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
model | str | None | Caminho para um arquivo de modelo Ultralytics YOLO. |
colormap | int | cv2.COLORMAP_DEEPGREEN | Mapa de cores a ser usado para o mapa de calor. |
show_in | bool | True | Flag para controlar se exibe as contagens de entrada no fluxo de vídeo. |
show_out | bool | True | Flag para controlar se exibe as contagens de saída no fluxo de vídeo. |
region | list | '[(20, 400), (1260, 400)]' | Lista de pontos que definem a região de contagem. |
Também pode aplicar diferentes track argumentos no Heatmap solução.
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Especifica o algoritmo de rastreamento a ser usado, por exemplo, bytetrack.yaml ou botsort.yaml. |
conf | float | 0.1 | Define o limite de confiança para detecções; valores mais baixos permitem que mais objetos sejam rastreados, mas podem incluir falsos positivos. |
iou | float | 0.7 | Define o limite de Intersecção sobre União (IoU) para filtrar detecções sobrepostas. |
classes | list | None | Filtra os resultados por índice de classe. Por exemplo, classes=[0, 2, 3] rastreia apenas as classes especificadas. |
verbose | bool | True | Controla a exibição dos resultados de rastreamento, fornecendo uma saída visual dos objetos rastreados. |
device | str | None | Especifica o dispositivo para inferência (por exemplo, cpu, cuda:0 ou 0). Permite que os usuários selecionem entre CPU, uma GPU específica ou outros dispositivos de computação para a execução do modelo. |
Adicionalmente, os argumentos de visualização suportados estão listados abaixo:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
show | bool | False | Se True, exibe as imagens ou vídeos anotados em uma janela. Útil para feedback visual imediato durante o desenvolvimento ou teste. |
line_width | int or None | None | Especifica a largura da linha das caixas delimitadoras. Se None, a largura da linha é ajustada automaticamente com base no tamanho da imagem. Fornece personalização visual para clareza. |
show_conf | bool | True | Exibe o score de confiança para cada detecção junto com o rótulo. Dá uma ideia da certeza do modelo para cada detecção. |
show_labels | bool | True | Exibe rótulos para cada detecção na saída visual. Fornece compreensão imediata dos objetos detectados. |
COLORMAPs de Mapa de Calor
| Nome do Mapa de Cores | Descrição |
|---|---|
cv::COLORMAP_AUTUMN | Mapa de cores de outono |
cv::COLORMAP_BONE | Mapa de cores ósseas |
cv::COLORMAP_JET | Mapa de cores Jet |
cv::COLORMAP_WINTER | Mapa de cores de inverno |
cv::COLORMAP_RAINBOW | Mapa de cores do arco-íris |
cv::COLORMAP_OCEAN | Mapa de cores do oceano |
cv::COLORMAP_SUMMER | Mapa de cores de verão |
cv::COLORMAP_SPRING | Mapa de cores da primavera |
cv::COLORMAP_COOL | Mapa de cores frias |
cv::COLORMAP_HSV | Mapa de cores HSV (Matiz, Saturação, Valor) |
cv::COLORMAP_PINK | Mapa de cores rosa |
cv::COLORMAP_HOT | Mapa de cores quentes |
cv::COLORMAP_PARULA | Mapa de cores Parula |
cv::COLORMAP_MAGMA | Mapa de cores Magma |
cv::COLORMAP_INFERNO | Mapa de cores Inferno |
cv::COLORMAP_PLASMA | Mapa de cores plasma |
cv::COLORMAP_VIRIDIS | Mapa de cores Viridis |
cv::COLORMAP_CIVIDIS | Mapa de cores Cividis |
cv::COLORMAP_TWILIGHT | Mapa de cores Twilight |
cv::COLORMAP_TWILIGHT_SHIFTED | Mapa de cores Shifted Twilight |
cv::COLORMAP_TURBO | Mapa de cores Turbo |
cv::COLORMAP_DEEPGREEN | Mapa de cores Verde Profundo |
Esses mapas de cores são comumente usados para visualizar dados com diferentes representações de cores.
Como os Heatmaps Funcionam no Ultralytics YOLO26
A solução de Mapa de Calor no Ultralytics YOLO26 estende a classe ObjectCounter para gerar e visualizar padrões de movimento em fluxos de vídeo. Quando inicializada, a solução cria uma camada de mapa de calor em branco que é atualizada à medida que os objetos se movem pelo quadro.
Para cada objeto detectado, a solução:
- Rastreia o objeto entre os quadros usando os recursos de tracking do YOLO26
- Atualiza a intensidade do mapa de calor na localização do objeto
- Aplica um mapa de cores selecionado para visualizar os valores de intensidade
- Sobrepõe o mapa de calor colorido no frame original
O resultado é uma visualização dinâmica que se desenvolve ao longo do tempo, revelando padrões de tráfego, movimentos de multidões ou outros comportamentos espaciais nos seus dados de vídeo.
FAQ
Como o Ultralytics YOLO26 gera heatmaps e quais são seus benefícios?
Ultralytics YOLO26 gera mapas de calor transformando dados complexos em uma matriz codificada por cores, onde diferentes tonalidades representam intensidades de dados. Mapas de calor facilitam a visualização de padrões, correlações e anomalias nos dados. Tons mais quentes indicam valores mais altos, enquanto tons mais frios representam valores mais baixos. Os principais benefícios incluem visualização intuitiva da distribuição de dados, detecção eficiente de padrões e análise espacial aprimorada para tomada de decisões. Para mais detalhes e opções de configuração, consulte a seção de Configuração de Mapa de Calor.
Posso usar o Ultralytics YOLO26 para realizar track de objetos e gerar um heatmap simultaneamente?
Sim, Ultralytics YOLO26 suporta tracking de objetos e geração de mapas de calor simultaneamente. Isso pode ser alcançado através de sua Heatmap solução integrada com modelos de tracking de objetos. Para isso, você precisa inicializar o objeto do mapa de calor e usar os recursos de tracking do YOLO26. Aqui está um exemplo simples:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(colormap=cv2.COLORMAP_PARULA, show=True, model="yolo26n.pt")
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
Para mais orientações, consulte a página do Modo de Rastreamento.
O que torna os mapas de calor do Ultralytics YOLO26 diferentes de outras ferramentas de visualização de dados, como as do OpenCV ou Matplotlib?
Os mapas de calor do Ultralytics YOLO26 são especificamente projetados para integração com seus modelos de detecção de objetos e tracking, fornecendo uma solução completa para análise de dados em tempo real. Ao contrário de ferramentas de visualização genéricas como OpenCV ou Matplotlib, os mapas de calor do YOLO26 são otimizados para desempenho e processamento automatizado, suportando recursos como tracking persistente, ajuste do fator de decaimento e sobreposição de vídeo em tempo real. Para mais informações sobre os recursos exclusivos do YOLO26, visite a Introdução ao Ultralytics YOLO26.
Como posso visualizar apenas classes de objetos específicas em heatmaps usando Ultralytics YOLO26?
Você pode visualizar classes de objetos específicas especificando as classes desejadas no track() método do modelo YOLO. Por exemplo, se você quiser visualizar apenas carros e pessoas (assumindo que seus índices de classe são 0 e 2), você pode definir o classes parâmetro de acordo.
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(show=True, model="yolo26n.pt", classes=[0, 2])
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
Por que as empresas devem escolher Ultralytics YOLO26 para a geração de mapas de calor na análise de dados?
Ultralytics YOLO26 oferece integração perfeita de detecção de objetos avançada e geração de mapas de calor em tempo real, tornando-o uma escolha ideal para empresas que buscam visualizar dados de forma mais eficaz. As principais vantagens incluem visualização intuitiva da distribuição de dados, detecção eficiente de padrões e análise espacial aprimorada para uma melhor tomada de decisões. Além disso, os recursos de ponta do YOLO26, como tracking persistente, colormaps personalizáveis e suporte para vários formatos de exportação, o tornam superior a outras ferramentas como TensorFlow e OpenCV para análise de dados abrangente. Saiba mais sobre aplicações de negócios em Planos Ultralytics.







