Gerenciamento de Estacionamento usando Ultralytics YOLO26 🚀
O que é um Sistema de Gestão de Estacionamento?
A gestão de estacionamento com Ultralytics YOLO26 garante estacionamento eficiente e seguro, organizando espaços e monitorando a disponibilidade. O YOLO26 pode melhorar a gestão de estacionamentos através da detecção de veículos em tempo real e insights sobre a ocupação das vagas.
Assista: Como criar um sistema de gestão de estacionamento com Ultralytics | Detecção de vagas em tempo real 🚗
Vantagens do Sistema de Gestão de Estacionamento
- Eficiência: O gerenciamento de estacionamentos otimiza o uso de vagas de estacionamento e reduz o congestionamento.
- Segurança e Proteção: A gestão de estacionamento utilizando YOLO26 melhora a segurança de pessoas e veículos através de medidas de vigilância e segurança.
- Emissões Reduzidas: A gestão de estacionamento utilizando YOLO26 gerencia o fluxo de tráfego para minimizar o tempo de inatividade e as emissões em estacionamentos.
Aplicações no Mundo Real
| Sistema de Gestão de Estacionamento | Sistema de Gestão de Estacionamento |
|---|---|
 |  |
| Gestão de estacionamento Vista Aérea usando Ultralytics YOLO26 | Gestão de estacionamento Vista Superior usando Ultralytics YOLO26 |
Fluxo de Trabalho do Código do Sistema de Gestão de Estacionamento
A seleção de pontos agora é fácil
Escolher pontos de estacionamento é uma tarefa crítica e complexa em sistemas de gestão de estacionamento. A Ultralytics simplifica este processo, fornecendo uma ferramenta "Anotador de vagas de estacionamento" que permite definir áreas de estacionamento, que podem ser utilizadas posteriormente para processamento adicional.
Passo 1: Capture um frame do vídeo ou stream da câmera onde você deseja gerenciar o estacionamento.
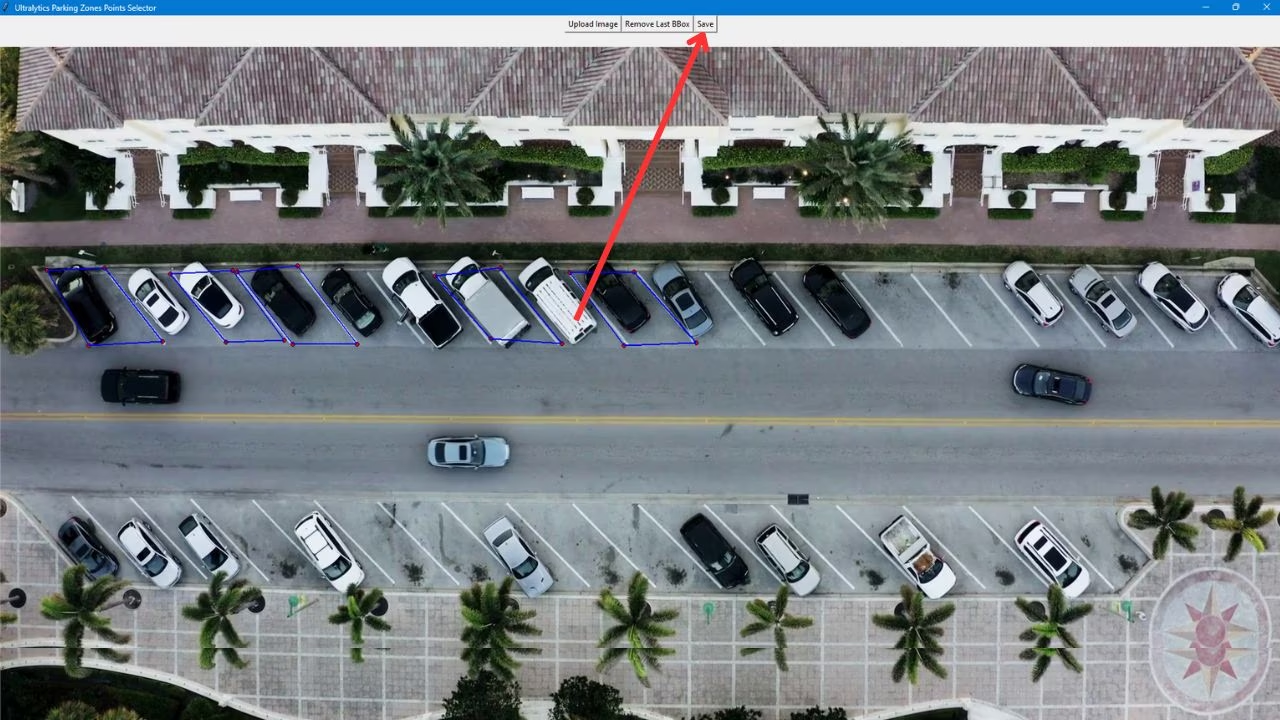
Passo 2: Use o código fornecido para iniciar uma interface gráfica, onde você pode selecionar uma imagem e começar a delinear as regiões de estacionamento clicando com o mouse para criar polígonos.
Anotador de vagas de estacionamento Ultralytics YOLO
Etapa adicional para instalar tkinter
Geralmente, tkinter já vem pré-embalado com Python. No entanto, se não veio, você pode instalá-lo usando as etapas destacadas:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Arquitetura:
sudo pacman -S tk - Windows: Reinstale o Python e ative a caixa de seleção
tcl/tk and IDLEem Funcionalidades Opcionais durante a instalação - MacOS: Reinstale o Python de https://www.python.org/downloads/macos/ ou
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Passo 3: Após definir as áreas de estacionamento com polígonos, clique save para armazenar um arquivo JSON com os dados no seu diretório de trabalho.
Passo 4: Agora você pode utilizar o código fornecido para gerenciamento de estacionamento com Ultralytics YOLO.
Gestão de Estacionamento usando Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Nota
Crie primeiro as anotações das zonas de estacionamento utilizando ParkingPtsSelection() em Python Passo 2 acima) e, em seguida, passe o ficheiro JSON para o CLI .
ParkingManagement Argumentos
Aqui está uma tabela com o ParkingManagement argumentos:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
model | str | None | Caminho para um arquivo de modelo Ultralytics YOLO. |
json_file | str | None | Caminho para o arquivo JSON que contém todos os dados de coordenadas de estacionamento. |
O ParkingManagement solução permite o uso de vários track parâmetros:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Especifica o algoritmo de rastreamento a ser usado, por exemplo, bytetrack.yaml ou botsort.yaml. |
conf | float | 0.1 | Define o limite de confiança para detecções; valores mais baixos permitem que mais objetos sejam rastreados, mas podem incluir falsos positivos. |
iou | float | 0.7 | Define o limite de Intersecção sobre União (IoU) para filtrar detecções sobrepostas. |
classes | list | None | Filtra os resultados por índice de classe. Por exemplo, classes=[0, 2, 3] rastreia apenas as classes especificadas. |
verbose | bool | True | Controla a exibição dos resultados de rastreamento, fornecendo uma saída visual dos objetos rastreados. |
device | str | None | Especifica o dispositivo para inferência (por exemplo, cpu, cuda:0 ou 0). Permite que os usuários selecionem entre CPU, uma GPU específica ou outros dispositivos de computação para a execução do modelo. |
Além disso, as seguintes opções de visualização são suportadas:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
show | bool | False | Se True, exibe as imagens ou vídeos anotados em uma janela. Útil para feedback visual imediato durante o desenvolvimento ou teste. |
line_width | int or None | None | Especifica a largura da linha das caixas delimitadoras. Se None, a largura da linha é ajustada automaticamente com base no tamanho da imagem. Fornece personalização visual para clareza. |
FAQ
Como Ultralytics YOLO26 aprimora os sistemas de gestão de estacionamento?
Ultralytics YOLO26 aprimora significativamente os sistemas de gestão de estacionamento ao fornecer detecção de veículos em tempo real e monitoramento. Isso resulta em uso otimizado de vagas de estacionamento, redução de congestionamentos e melhoria da segurança através de vigilância contínua. O Sistema de Gestão de Estacionamento permite um fluxo de tráfego eficiente, minimizando tempos de inatividade e emissões em estacionamentos, contribuindo assim para a sustentabilidade ambiental. Para mais detalhes, consulte o fluxo de trabalho do código de gestão de estacionamento.
Quais são os benefícios de usar Ultralytics YOLO26 para estacionamento inteligente?
Utilizar Ultralytics YOLO26 para estacionamento inteligente oferece inúmeros benefícios:
- Eficiência: Otimiza o uso de vagas de estacionamento e diminui o congestionamento.
- Segurança: Melhora a vigilância e garante a segurança de veículos e pedestres.
- Impacto Ambiental: Ajuda a reduzir as emissões, minimizando os tempos de marcha lenta dos veículos. Explore mais benefícios na seção Vantagens do Sistema de Gestão de Estacionamento.
Como posso definir vagas de estacionamento usando Ultralytics YOLO26?
Definir vagas de estacionamento é simples com Ultralytics YOLO26:
- Capturar um frame de um vídeo ou stream de câmera.
- Use o código fornecido para iniciar uma GUI para selecionar uma imagem e desenhar polígonos para definir vagas de estacionamento.
- Salve os dados rotulados em formato JSON para processamento posterior. Para obter instruções detalhadas, consulte a seção de seleção de pontos acima.
Posso personalizar o modelo YOLO26 para necessidades específicas de gestão de estacionamento?
Sim, Ultralytics YOLO26 permite a personalização para necessidades específicas de gestão de estacionamento. É possível ajustar parâmetros como o cores de região ocupada e disponível, margens para exibição de texto e muito mais. Utilizando o ParkingManagement da classe argumentos, você pode personalizar o modelo para atender às suas necessidades específicas, garantindo máxima eficiência e eficácia.
Quais são algumas aplicações reais de Ultralytics YOLO26 na gestão de estacionamentos?
Ultralytics YOLO26 é utilizado em diversas aplicações reais para gestão de estacionamentos, incluindo:
- Detecção de Vagas de Estacionamento: Identificação precisa de espaços disponíveis e ocupados.
- Vigilância: Aprimoramento da segurança através do monitoramento em tempo real.
- Gerenciamento do Fluxo de Tráfego: Redução de tempos ociosos e congestionamento com manuseio eficiente do tráfego. Imagens mostrando essas aplicações podem ser encontradas em aplicações do mundo real.






