Monitoramento de Treinos utilizando Ultralytics YOLO26
![]()
O monitoramento de treinos através da estimativa de pose com Ultralytics YOLO26 aprimora a avaliação de exercícios ao track com precisão pontos de referência e articulações corporais chave em tempo real. Essa tecnologia fornece feedback instantâneo sobre a forma de exercício, track rotinas de treino e mede métricas de desempenho, otimizando as sessões de treino para usuários e treinadores.
Assista: Como Monitorar Exercícios de Treino com Ultralytics YOLO | Agachamentos, Extensão de Pernas, Flexões e Mais
Vantagens do Monitoramento de Treinos
- Desempenho Otimizado: Personalização de treinos com base em dados de monitoramento para melhores resultados.
- Alcance de Objetivos: Rastreie e ajuste as metas de condicionamento físico para um progresso mensurável.
- Personalização: Planos de treino personalizados com base em dados individuais para eficácia.
- Conscientização sobre a Saúde: Detecção precoce de padrões que indicam problemas de saúde ou excesso de treinamento.
- Decisões Informadas: Decisões orientadas por dados para ajustar rotinas e definir metas realistas.
Aplicações no Mundo Real
| Monitoramento de Treinos | Monitoramento de Treinos |
|---|---|
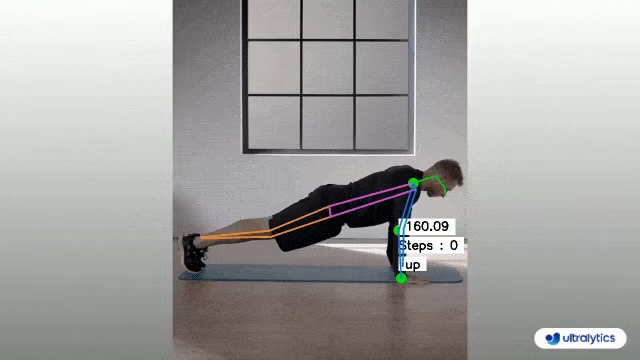 | 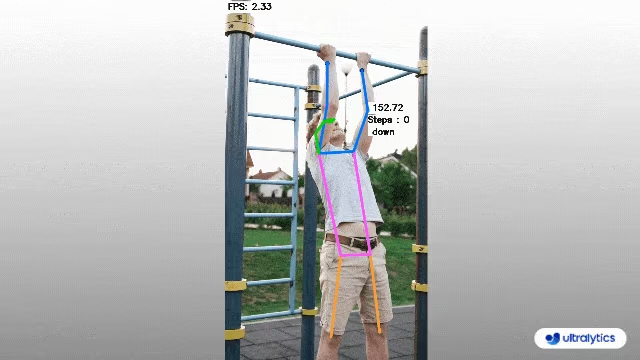 |
| Contagem de Flexões | Contagem de Flexões |
Monitoramento de Treinos usando Ultralytics YOLO
# Run a workout example
yolo solutions workout show=True
# Pass a source video
yolo solutions workout source="path/to/video.mp4"
# Use keypoints for pushups
yolo solutions workout kpts="[6, 8, 10]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("workouts_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Init AIGym
gym = solutions.AIGym(
show=True, # display the frame
kpts=[6, 8, 10], # keypoints for monitoring specific exercise, by default it's for pushup
model="yolo26n-pose.pt", # path to the YOLO26 pose estimation model file
# line_width=2, # adjust the line width for bounding boxes and text display
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = gym(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
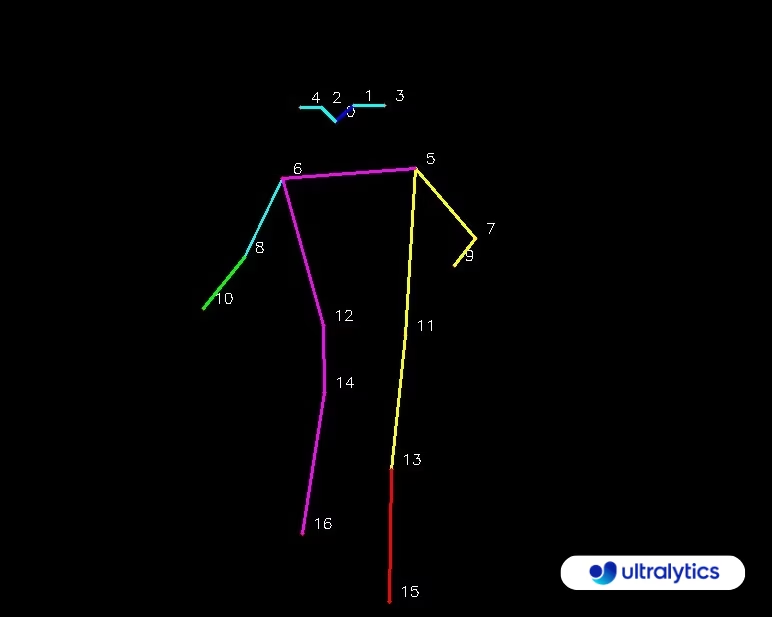
Mapa de KeyPoints
AIGym Argumentos
Aqui está uma tabela com o AIGym argumentos:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
model | str | None | Caminho para um arquivo de modelo Ultralytics YOLO. |
up_angle | float | 145.0 | Limite de ângulo para a pose 'para cima'. |
down_angle | int | 90 | Limite de ângulo para a pose 'para baixo'. |
kpts | list[int] | '[6, 8, 10]' | Lista de três índices de keypoints usados para monitorar treinos. Esses keypoints correspondem a articulações ou partes do corpo, como ombros, cotovelos e pulsos, para exercícios como flexões, barras, agachamentos e abdominais. |
O AIGym solução também suporta uma variedade de parâmetros de rastreamento de objetos:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Especifica o algoritmo de rastreamento a ser usado, por exemplo, bytetrack.yaml ou botsort.yaml. |
conf | float | 0.1 | Define o limite de confiança para detecções; valores mais baixos permitem que mais objetos sejam rastreados, mas podem incluir falsos positivos. |
iou | float | 0.7 | Define o limite de Intersecção sobre União (IoU) para filtrar detecções sobrepostas. |
classes | list | None | Filtra os resultados por índice de classe. Por exemplo, classes=[0, 2, 3] rastreia apenas as classes especificadas. |
verbose | bool | True | Controla a exibição dos resultados de rastreamento, fornecendo uma saída visual dos objetos rastreados. |
device | str | None | Especifica o dispositivo para inferência (por exemplo, cpu, cuda:0 ou 0). Permite que os usuários selecionem entre CPU, uma GPU específica ou outros dispositivos de computação para a execução do modelo. |
Adicionalmente, as seguintes configurações de visualização podem ser aplicadas:
| Argumento | Tipo | Padrão | Descrição |
|---|---|---|---|
show | bool | False | Se True, exibe as imagens ou vídeos anotados em uma janela. Útil para feedback visual imediato durante o desenvolvimento ou teste. |
line_width | int or None | None | Especifica a largura da linha das caixas delimitadoras. Se None, a largura da linha é ajustada automaticamente com base no tamanho da imagem. Fornece personalização visual para clareza. |
show_conf | bool | True | Exibe o score de confiança para cada detecção junto com o rótulo. Dá uma ideia da certeza do modelo para cada detecção. |
show_labels | bool | True | Exibe rótulos para cada detecção na saída visual. Fornece compreensão imediata dos objetos detectados. |
FAQ
Como monitoro meus treinos utilizando o Ultralytics YOLO26?
Para monitorar seus treinos usando o Ultralytics YOLO26, você pode utilizar os recursos de estimativa de pose para rastrear e analisar marcos corporais e articulações chave em tempo real. Isso permite que você receba feedback instantâneo sobre sua forma de exercício, conte repetições e meça métricas de desempenho. Você pode começar usando o código de exemplo fornecido para flexões, barras ou exercícios abdominais, conforme mostrado:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
gym = solutions.AIGym(
line_width=2,
show=True,
kpts=[6, 8, 10],
)
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = gym(im0)
cv2.destroyAllWindows()
Para mais personalização e configurações, você pode consultar a seção AIGym na documentação.
Quais são os benefícios de usar o Ultralytics YOLO26 para monitoramento de treinos?
O uso do Ultralytics YOLO26 para monitoramento de treinos oferece vários benefícios chave:
- Desempenho Otimizado: Ao personalizar os treinos com base nos dados de monitoramento, você pode obter melhores resultados.
- Conquista de Objetivos: Rastreie e ajuste facilmente as metas de condicionamento físico para um progresso mensurável.
- Personalização: Obtenha planos de treino personalizados com base nos seus dados individuais para uma eficácia ideal.
- Conscientização sobre a Saúde: Detecção precoce de padrões que indicam potenciais problemas de saúde ou excesso de treinamento.
- Decisões Informadas: Tome decisões orientadas por dados para ajustar rotinas e definir metas realistas.
Você pode assistir a uma demonstração em vídeo no YouTube para ver esses benefícios em ação.
Quão preciso é o Ultralytics YOLO26 em detect e track exercícios?
O Ultralytics YOLO26 é altamente preciso em detect e track exercícios devido aos seus recursos de estimativa de pose de última geração. Ele pode rastrear com precisão marcos corporais e articulações chave, fornecendo feedback em tempo real sobre a forma de exercício e métricas de desempenho. Os pesos pré-treinados do modelo e a arquitetura robusta garantem alta precisão e confiabilidade. Para exemplos do mundo real, confira a seção de aplicações no mundo real na documentação, que apresenta a contagem de flexões e barras.
Posso usar o Ultralytics YOLO26 para rotinas de treino personalizadas?
Sim, o Ultralytics YOLO26 pode ser adaptado para rotinas de treino personalizadas. O AIGym classe suporta diferentes tipos de pose, como pushup, pullup, e abworkout. Você pode especificar pontos-chave e ângulos para detectar exercícios específicos. Aqui está um exemplo de configuração:
from ultralytics import solutions
gym = solutions.AIGym(
line_width=2,
show=True,
kpts=[6, 8, 10], # For pushups - can be customized for other exercises
)
Para mais detalhes sobre como definir argumentos, consulte o Argumentos AIGym seção. Essa flexibilidade permite que você monitore vários exercícios e personalize rotinas com base em suas metas de fitness.
Como posso salvar a saída do monitoramento de treinos utilizando o Ultralytics YOLO26?
Para salvar a saída de monitoramento do treino, você pode modificar o código para incluir um escritor de vídeo que salva os frames processados. Aqui está um exemplo:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("workouts.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
gym = solutions.AIGym(
line_width=2,
show=True,
kpts=[6, 8, 10],
)
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = gym(im0)
video_writer.write(results.plot_im)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Esta configuração grava o vídeo monitorado em um arquivo de saída, permitindo que você revise seu desempenho de treino mais tarde ou compartilhe com treinadores para obter feedback adicional.





